0%
0%
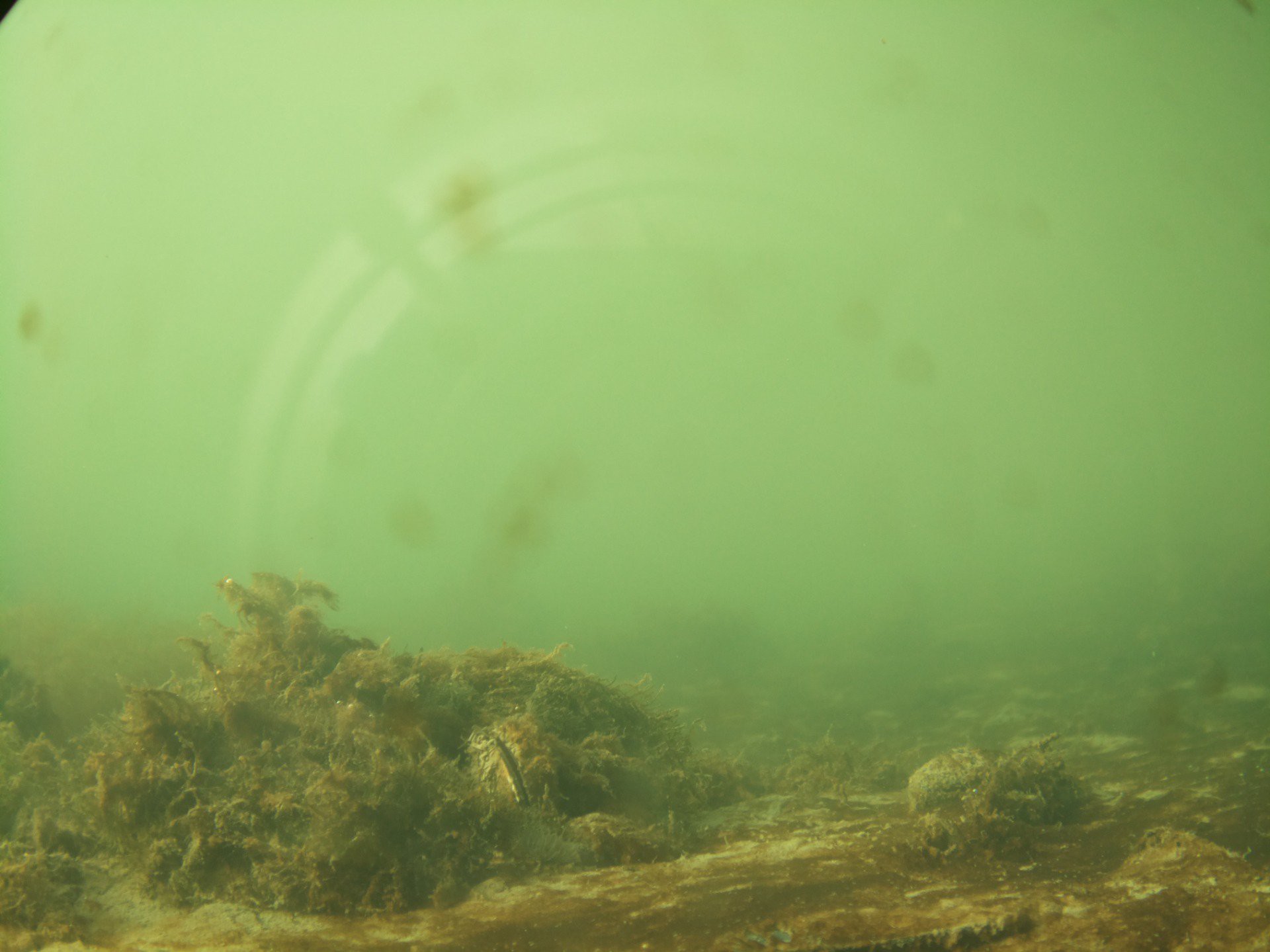
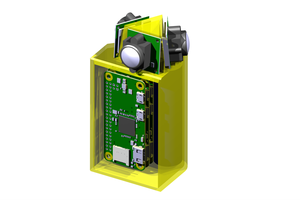
PipeCam: Low-Cost Autonomous Underwater Camera
Low cost autonomous underwater camera for long term deployments and exploration
 Fred Fourie
Fred FourieBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
















 taposk
taposk
 stoduk
stoduk
 Eric Wiiliam
Eric Wiiliam
 Warren
Warren
Hey the github repository doesnt seem to exist anymore, any update on that?
cheers