 Nicholas Seward
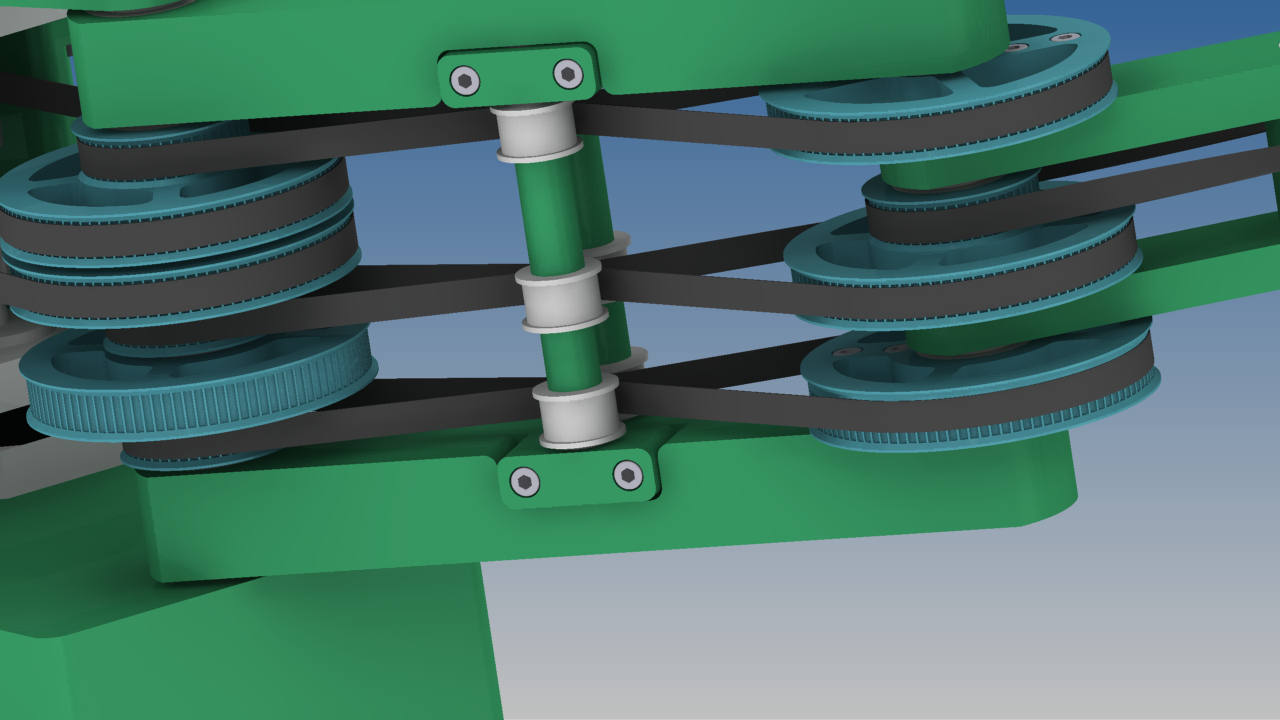
Nicholas SewardThe design is parametric so all of the details can be modified.
Build Area: 5 times bigger than a 200x200mm printer.
Build Height: 100mm
Speed: Prints well at 30mm/s but have printed at 90mm/s with acceptable results. More testing is needed.
Accuracy: Calibration cubes have been shown to be square in all dimensions and dimensionally accurate +/-0.4mm
Precision: It is a SCARA so hard to say and microstepping helps but can't be fully trusted. Let's just say at full steps it is good enough and in practice it is awesome.
Auto Bed Leveling: Yes
Endstops: No. I use a magic accelerometer to fully characterize the machine.
LCD Panel: Yes. Why have I never used one before? They are awesome for standalone printing.
Controller: Smoothieware compatable
Firmware: Heavily modified custom Smoothieware








 Dewet
Dewet
 Alan Chambers
Alan Chambers
 Michal Wojciechowski
Michal Wojciechowski
Does anyone know were to find the files? Looks like an amazing project!