 Pomurnik
PomurnikProjekt został wykonany przez studentów z wydziału Inżynierii Mechanicznej i Robotyki na Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie w ramach przedmiotu Podstawy Mechatroniki. Do 5 osobowego zespołu należą kolejno: Adam Koterwa, Maciej Korkosz, Szymon Mrugał, Witold Pacholarz oraz Marcin Mazur.
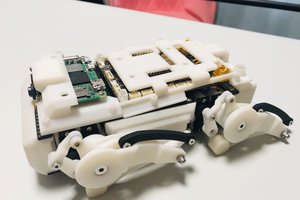
Dla pająka poruszającego się do przodu prędkość dwóch silniczków jest ustawiona na takim samym poziomie. W przypadku skręcania robota np. w lewo, jeden silniczek porusza się do przodu zaś drugi porusza się z tą samą wartością tylko w przeciwną stronę. 3 sensory z przodu wykrywają przeszkodę i w zależności od tego, czy przeszkoda znajduje się po prawej, czy po lewej stronie, pająk zaczyna skręcać w przeciwnym kierunku oddalając się od napotkanego przedmiotu. W przypadku gdy przeszkoda znajduje się centralnie przed robotem pająk, zgodnie z przyjętymi ustaleniami, skręci w lewo. Manewr omijania przeszkody wygląda tak, że pająk widząc przeszkodę wykonuje ruch obrotowy do momentu aż czujniki wykryją, iż znalazł się w optymalnej pozycji by kontynuować ruch wzdłuż linii prostej.
Przy pomocy programu Android Studio stworzyliśmy aplikację pozwalającą sterować robotem za pomocą telefonu bądź tableta, posiadających system Android. Sterowanie umożliwia połączenie urządzenia z modułem Bluetooth zainstalowanym w zbudowanym robocie. Aplikacja umożliwia przełączanie pomiędzy sterowaniem manualnym i automatycznym. Tryb automatyczny uruchamia główny algorytm niezależnego od człowieka toru poruszania się robota (opisany powyżej). Tryb manualny umożliwia użycie przycisków służących do poruszania pająkiem do przodu i do tyłu oraz jego skręcanie. Na wyświetlaczu telefonu zobaczymy także przycisk „Dance”, po naciśnięciu, którego obserwować możemy sekwencję na pozór przypadkowych ruchów robota, przypominających taniec. Pod spodem zamieszczamy kod dwóch głównych activities aplikacji, odpowiedzialnych za funkcje związane z obsługą połączenia Bluetooth.
Kod programu do Robocora, a także aplikacji można pobrać z:
https://github.com/WIMIRRobotPajak/RobotPajak/tree/master
 bialykostek
bialykostek
 Tapiwa W
Tapiwa W
 GEEKROS
GEEKROS