0%
0%
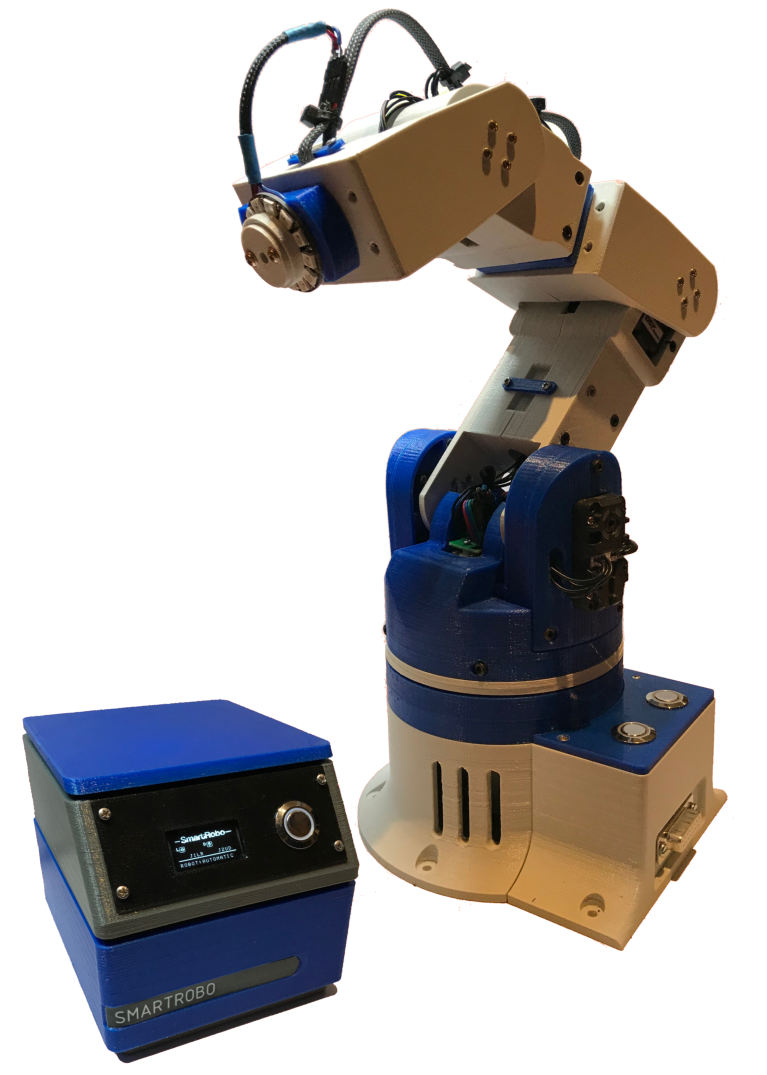
6DOF Robotic arm
Smart servo based robot arm
 dannyvandenheuvel
dannyvandenheuvelBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Read more about this project
Read more about this project





 JackRC
JackRC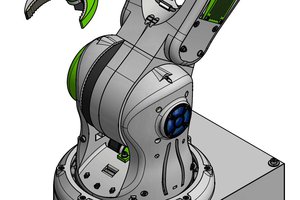
 Andreas Hoelldorfer
Andreas Hoelldorfer
 Dimitris Xydas
Dimitris Xydas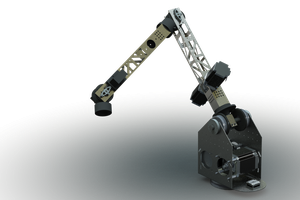
stl files for the controller box thanks