0%
0%
YARRM - 7-DOF Low-Cost Robot Arm
Yet Another Robot aRM - where I develop a low-cost compliant robot arm with a 1meter reach, 1KG payload.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
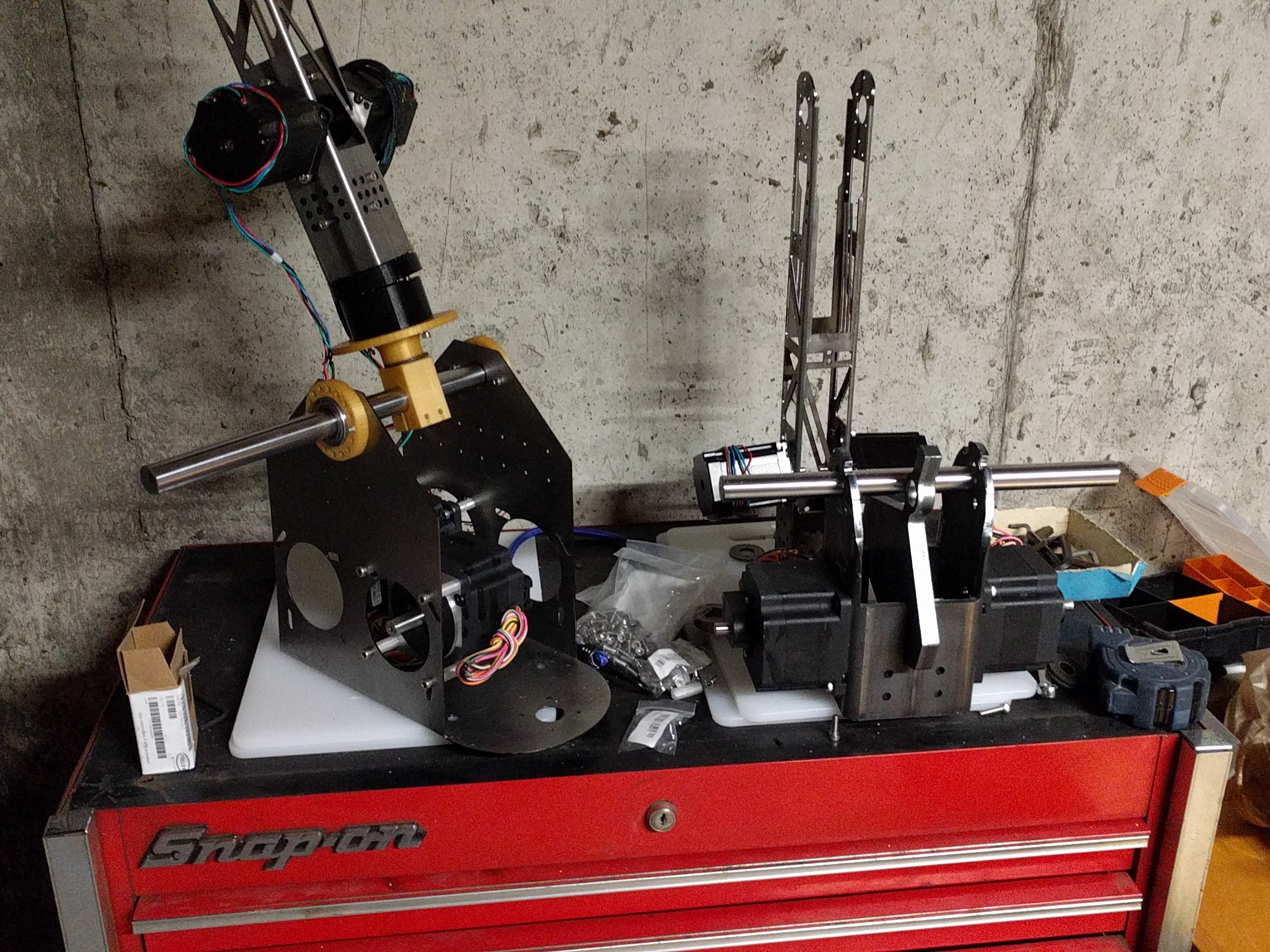
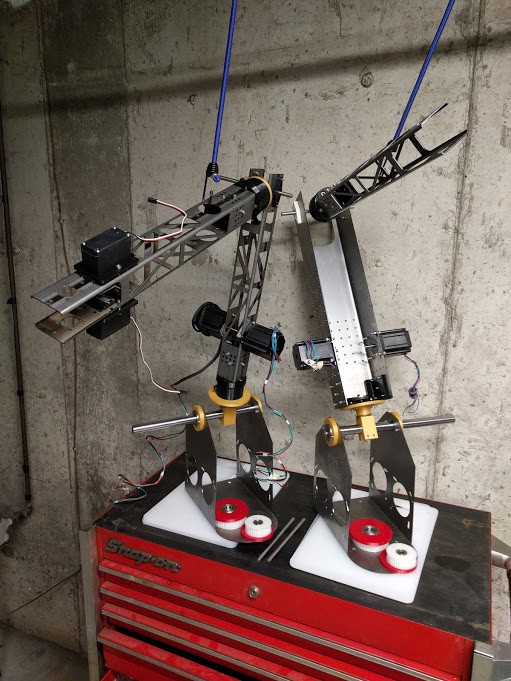
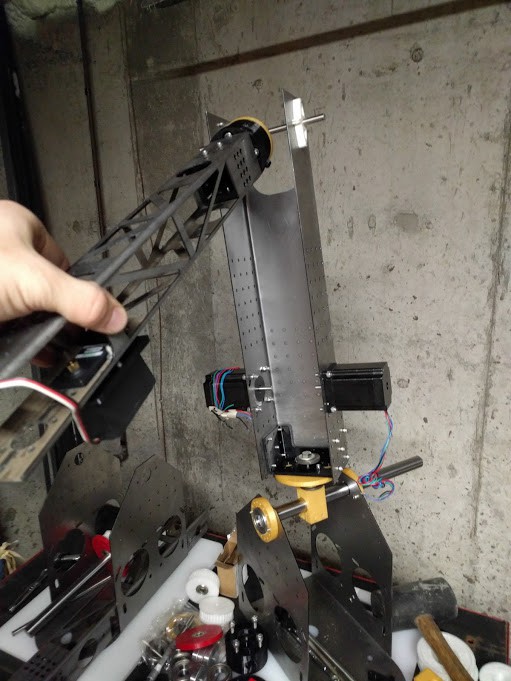
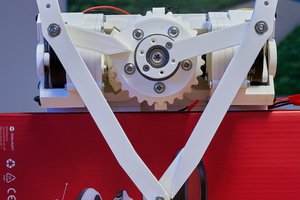
 Here the motors are still NEMA34s geared ~4:1 or 5:1 to the 20mm axle.
Here the motors are still NEMA34s geared ~4:1 or 5:1 to the 20mm axle.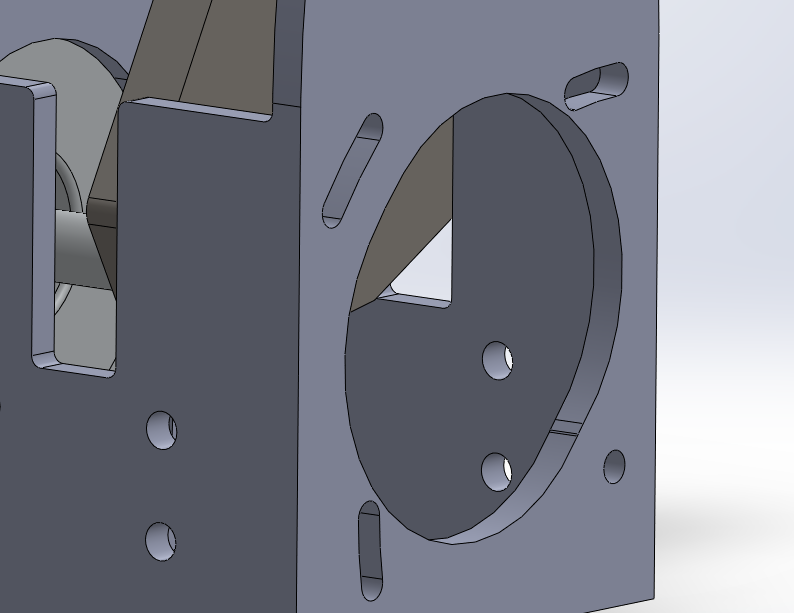








 Val
Val
 Pavel Surynek
Pavel Surynek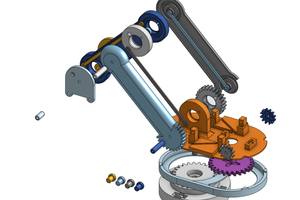
 Tim Wilkinson
Tim Wilkinson
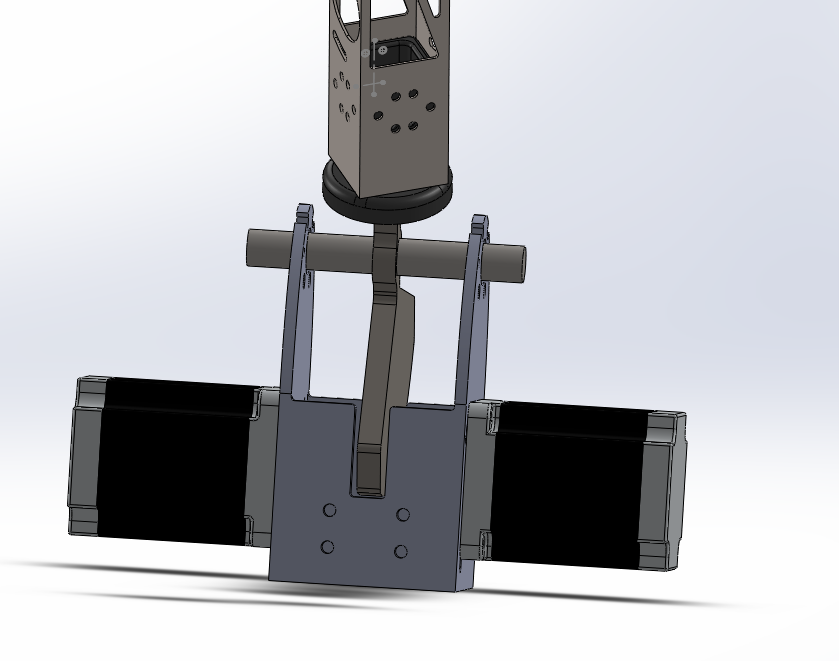
It looks like designing and building one of the differentials may be a good next step. These are what will make or break this project. Are you really trying to drive this precision arm with friction differentials as some pictures suggest? Or are those going to replaced with bevelled gears? Good gears will also have a big impact on the overall costs. Or are they cable driven?