 Ilyas Akhmetzyanov
Ilyas AkhmetzyanovIn this project I use free versions of Autodesk Fusion360 and EagleCAD.
My main goal is make this balancing board without any microcontrollers, electronic kits and modules from the market.
CC-BY-SA
Balancing board based on barrow wheels and w/o microcontrollers
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
In this project I use free versions of Autodesk Fusion360 and EagleCAD.
My main goal is make this balancing board without any microcontrollers, electronic kits and modules from the market.
CC-BY-SA
|
iges - 32.59 kB - 08/07/2017 at 16:58 |
|
|
|
iges - 26.19 kB - 08/07/2017 at 16:58 |
|
|
|
iges - 25.95 kB - 08/07/2017 at 16:58 |
|
|
|
iges - 1.30 MB - 08/07/2017 at 14:54 |
|
|
|
iges - 1.30 MB - 08/07/2017 at 14:54 |
|
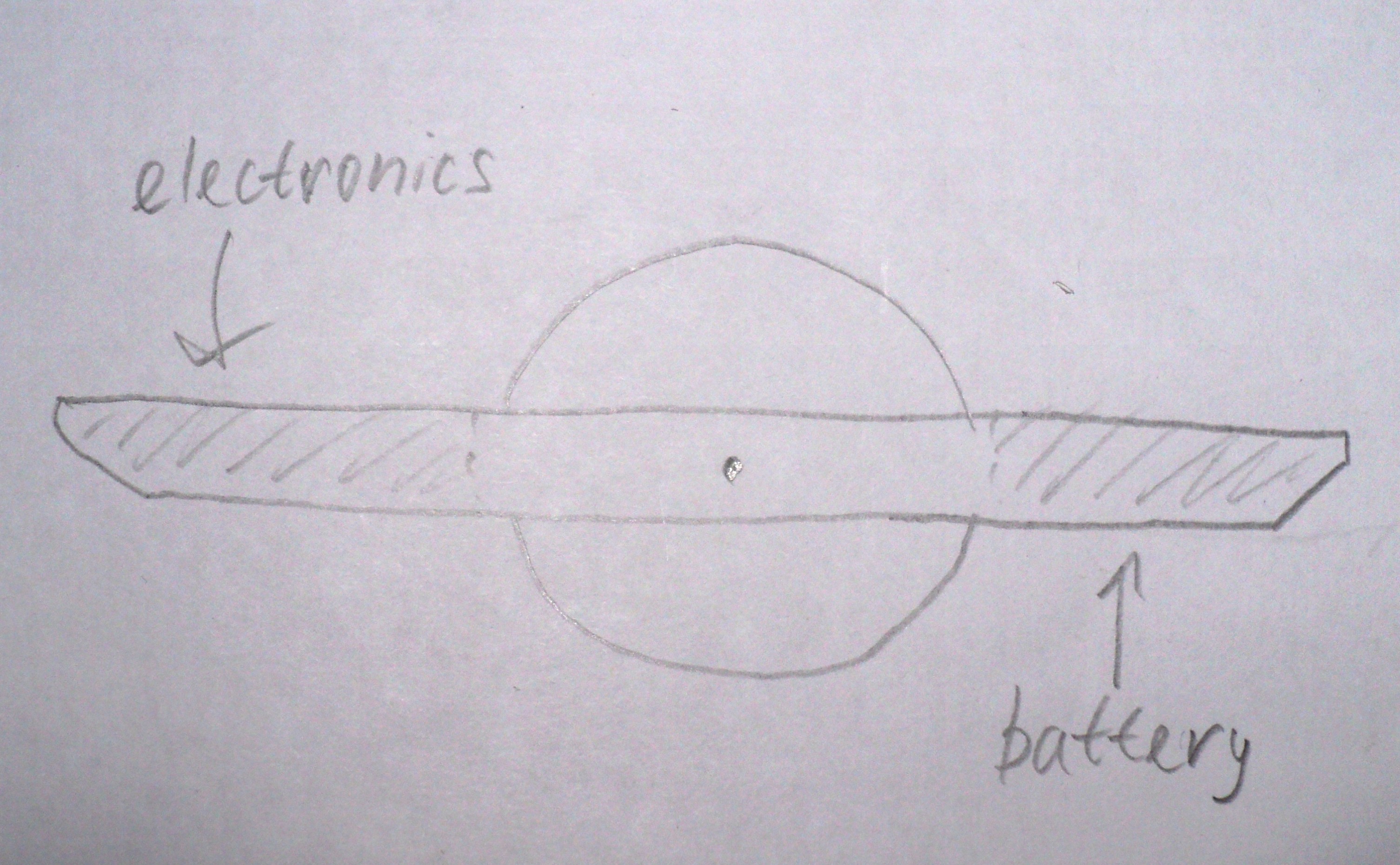
That was a very long delivery, but finally - spacers is here. Now I try to find spatial configuration of the 18650 batteries, because internal space of the battery compartment is limited. Max height is 40mm, length and width limits is about 240 mm.
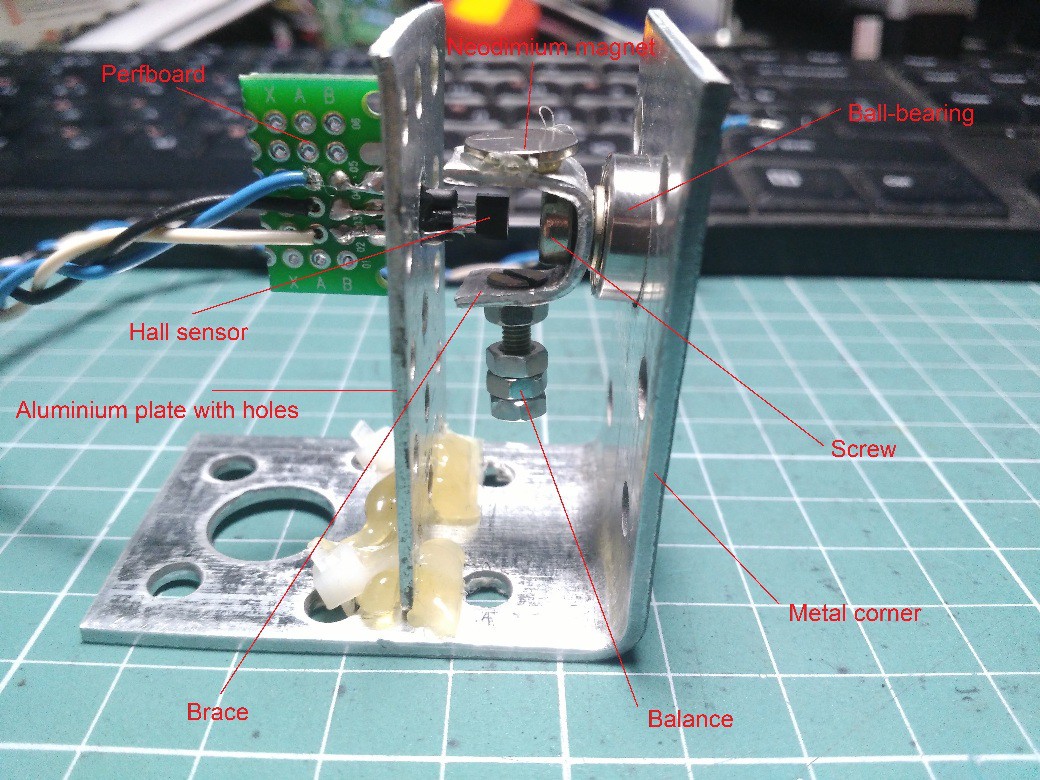
Hello again! Today I built tilt sensor prototype for testing. It based on very easy principle - moving Hall sensor in magnet field. Sensor have a very simple construction - neodimium magnet is glued to pendulum and moving around Hall sensor.
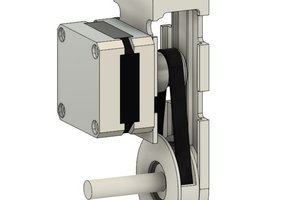
Hello for everyone! This was a long evening but I did it. Simplified 3D model is ready. Of course this is not final construction, but now you can look at approximatly view and imaging how project is will be.
Hi! In previous log I told about problem with connection gearbox to shafts, but I don't shown and explain what gearbox is. Transmission consist of two stages, first is gearbox from cheapest cordless screwdriver, which include planetary gear, second is are pair of gears from two different bicycles and chain.
The planetary gearbox consists of two stages, the gear ratio is about 7.9 for each of them. I will use only one and for connecting this gearbox to motor shaft I need to replacing carrier of this stage for new one with muff. Plus second output carrier must be replaced by custom to connecting to small gear from bicycle.
Pair of the bicycle gears I will use for transmission torque from motor shaft to wheels. This pair have a small ratio is about 1.5.
Hello! Today I was busy by housework, but found time for assembling motor driver board. I using perfboard for that, because I have possibility add some elements in circuit without etching new pcb. My motor driver board based on L6203 IC from ST, I used this chip before and it was a good experience. In start of the project, I wanted build motor driver on discrete MOSFETs, but it given me problem like needing separate radiators for cooling, I can't screw all transistors on one radiator or electronics enclosure, it will shorted the circuit. In case with L6203, I've all I need in one IC, which I can just screwing to enclosure and don't need additional radiator.
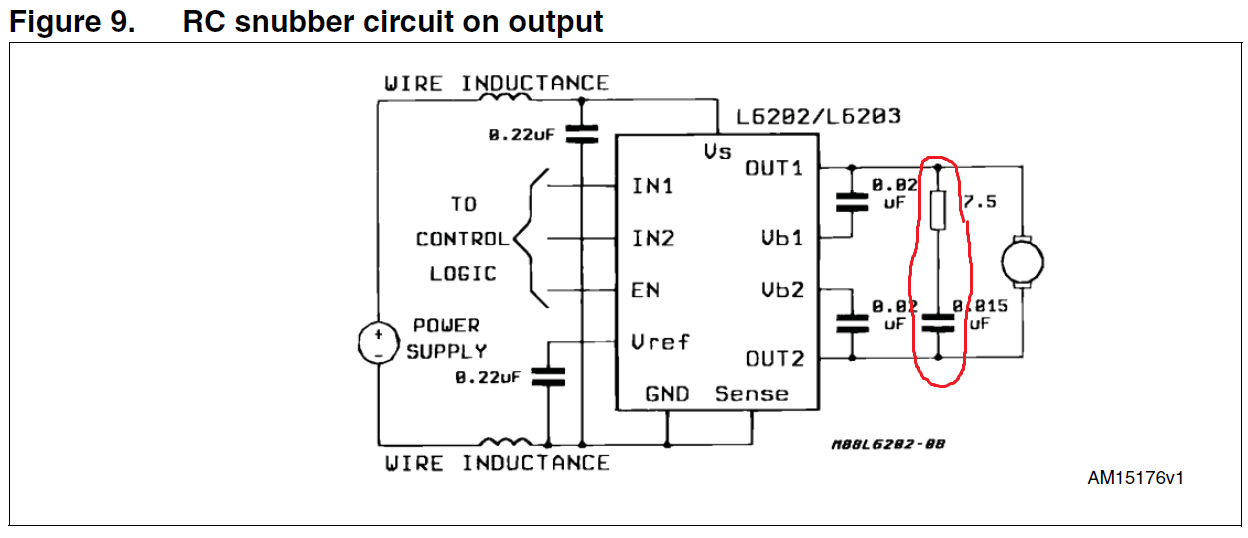
When I almost assembled this board I realise that all my previous experience was for very simple and stable application, but now motor driver will be in balancing board which means - frequently switching of direction and possibilities for inducing parasitic induction currents in output circuit of the driver. In application notes for this one, ST told that you need using snubber network (look applied picture). This network is drop the voltage which induced by motor own induction in moment of switching H-bridge FETs of the motor driver.
I don't have needed components for build it and I will try to visit local store tomorrow.
Today I visited local hardware store, and bought some materials for project: barrow wheels and aluminium profiles, drawings are almost ready, on next week I'll started assembling frame.
Hello for everyone! Project ongoing, I thought about connections of gears to shafts a long time, seeking in store components which can fit for that. But now I decided to make some blueprints and give it to local factory, after that I will have details which perfect for my project.
I don't have so many time but now I working on 3D model. Have some problem with connection of gearbox to DC motor.

You might like SideWay: https://hackaday.io/project/6999-sideway Similar in design, at least.

Hello, I seen your project earlier. Yes, our projects is similar, but I try for full body control.
When you say "full body control", I assume you mean steering too? I eventually want to have that, but the board I was using didn't have enough inputs to add weight / pressure sensors, so I had to use a Nunchuk remote. It uses angle for forward / backward motion though. I'll be curious to see how yours progresses.
Thanks! Unfortunately I'm very busy on my main job, but project is still going. New updates is coming soon.




 Ruediger F. Loeckenhoff
Ruediger F. Loeckenhoff
 DIY GUY Chris
DIY GUY Chris
Wow, your project is such a great. As I have learned something new by reading this project. Would like to share it with the team members of engraving services so that they could also read it and can implement something new in our running projects.