-
Home run, we did it!
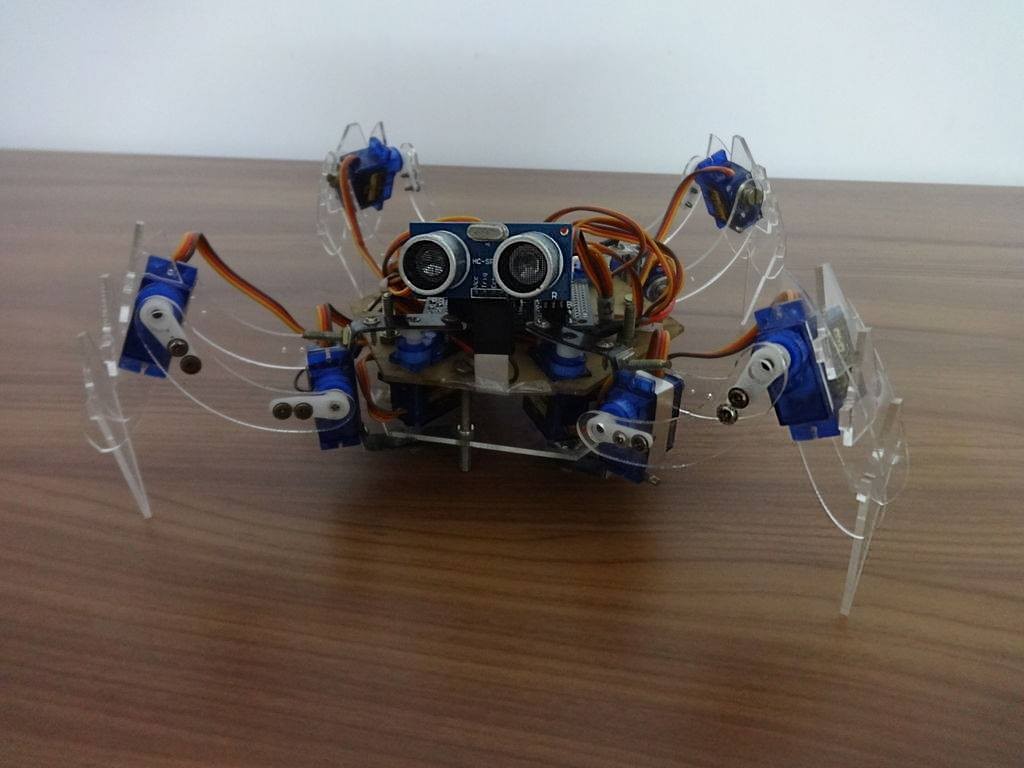
07/24/2017 at 06:51 • 0 commentsIts been a year since we have been working on this project but it's finally complete. Quattro can now walk, see, avoid obstacles and even dance. She might look dangerous but remember she's non-lethal : )
That's it from us!
![]()
-
Ready for testing
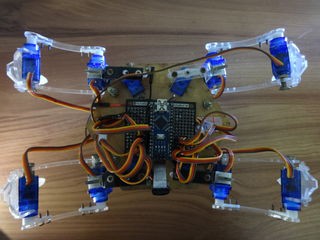
07/24/2017 at 06:49 • 1 commentToday we tested Quattro on a cup, she worked rather well. Although when put on the ground she struggles a bit, I say we give her a bit more power...updates soon.
![]()
PS: wiring up this beast is a real mess!
![]()
-
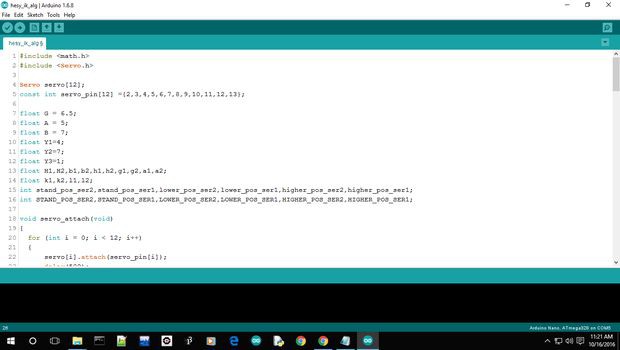
Inverse kinematics
07/24/2017 at 06:47 • 0 commentsA big thanks to our friend Suman Pal who really brought this project to life by developing the maths and then converting it to code.
![]()
-
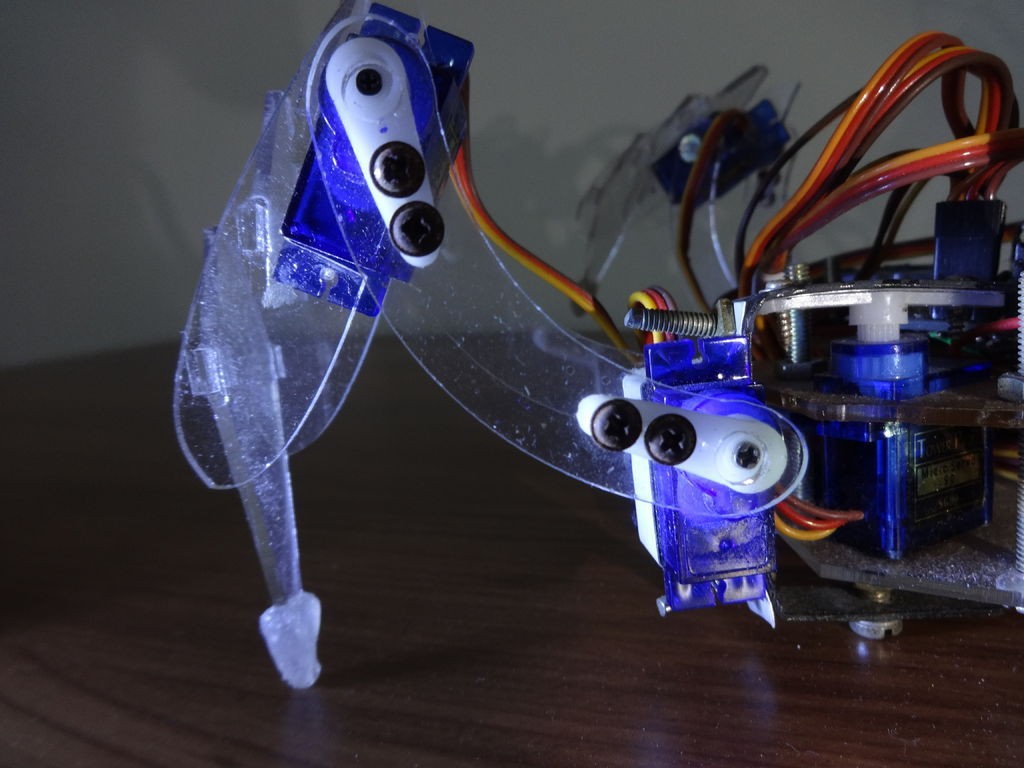
Robot hardware completed
07/24/2017 at 06:45 • 0 commentsAfter three months, of failure, after blood sweat and tear , Quattro has finally manifested herself in this Beauty. Very satisfied with the product. What about you guys?
![]()
Now the tough bit developing algorithms to make it walk!
-
Buying a huge number of motors!!!
07/24/2017 at 06:40 • 0 commentsWe bought the small servo motors of Amazon which performed rather well.
![]()
The star of the show is definitely the Arduino Nano, because of its size and power. I'm off to making this beast!
-
Robust Design Successful!
07/24/2017 at 06:37 • 0 commentsWe started this project in 2016 and after lots of modifications we have finally succeeded in a robust frame ready for laser cutting
![]()
QUATTRO - The Arduino Quadruped
Say hello to Quattro, a fully functional,non lethal Arduino quadruped robot!