 BTom
BTomThe first version of the robot: https://hackaday.io/project/11956-robot-for-telepresence-and-vr-experiments
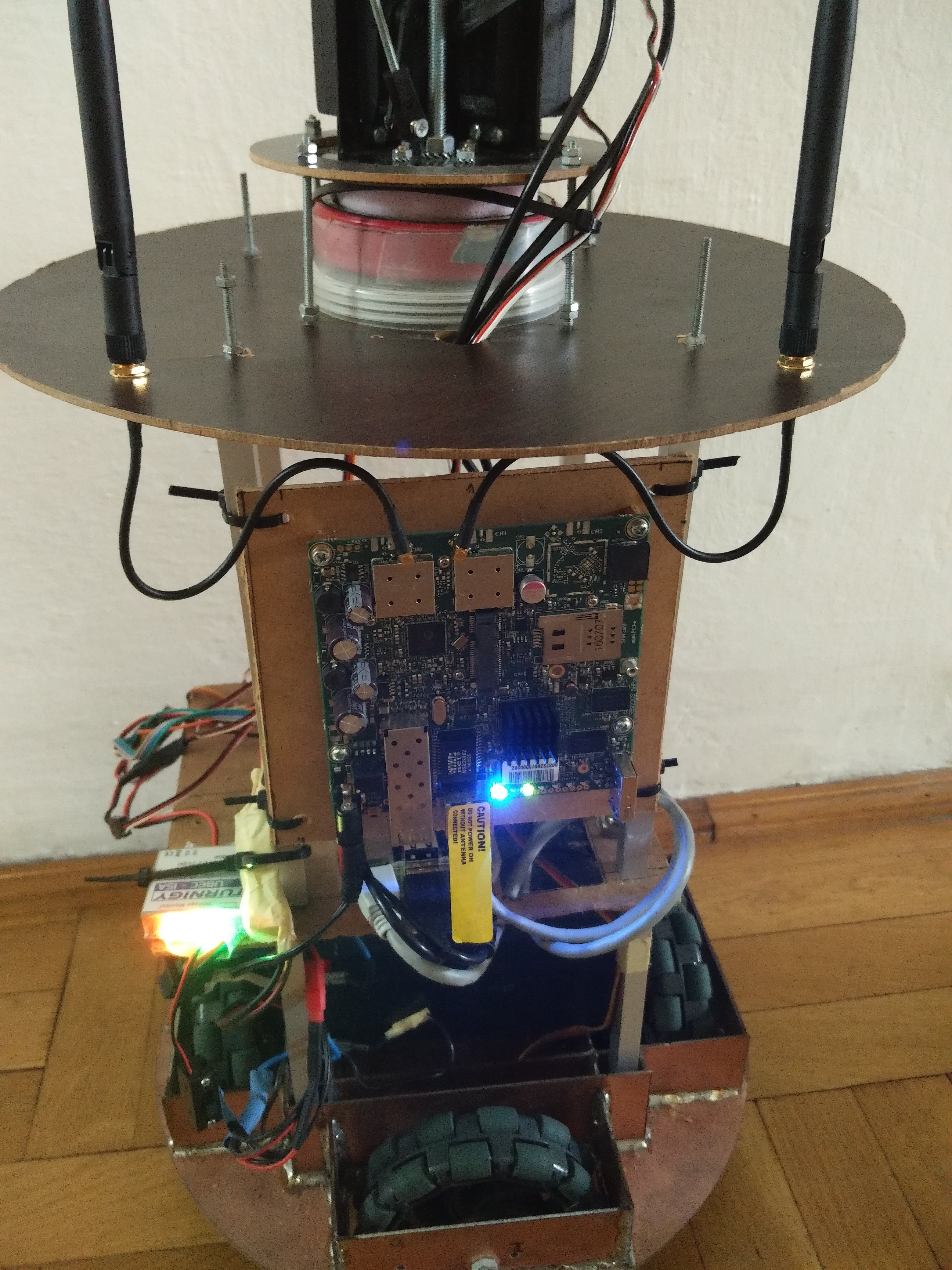
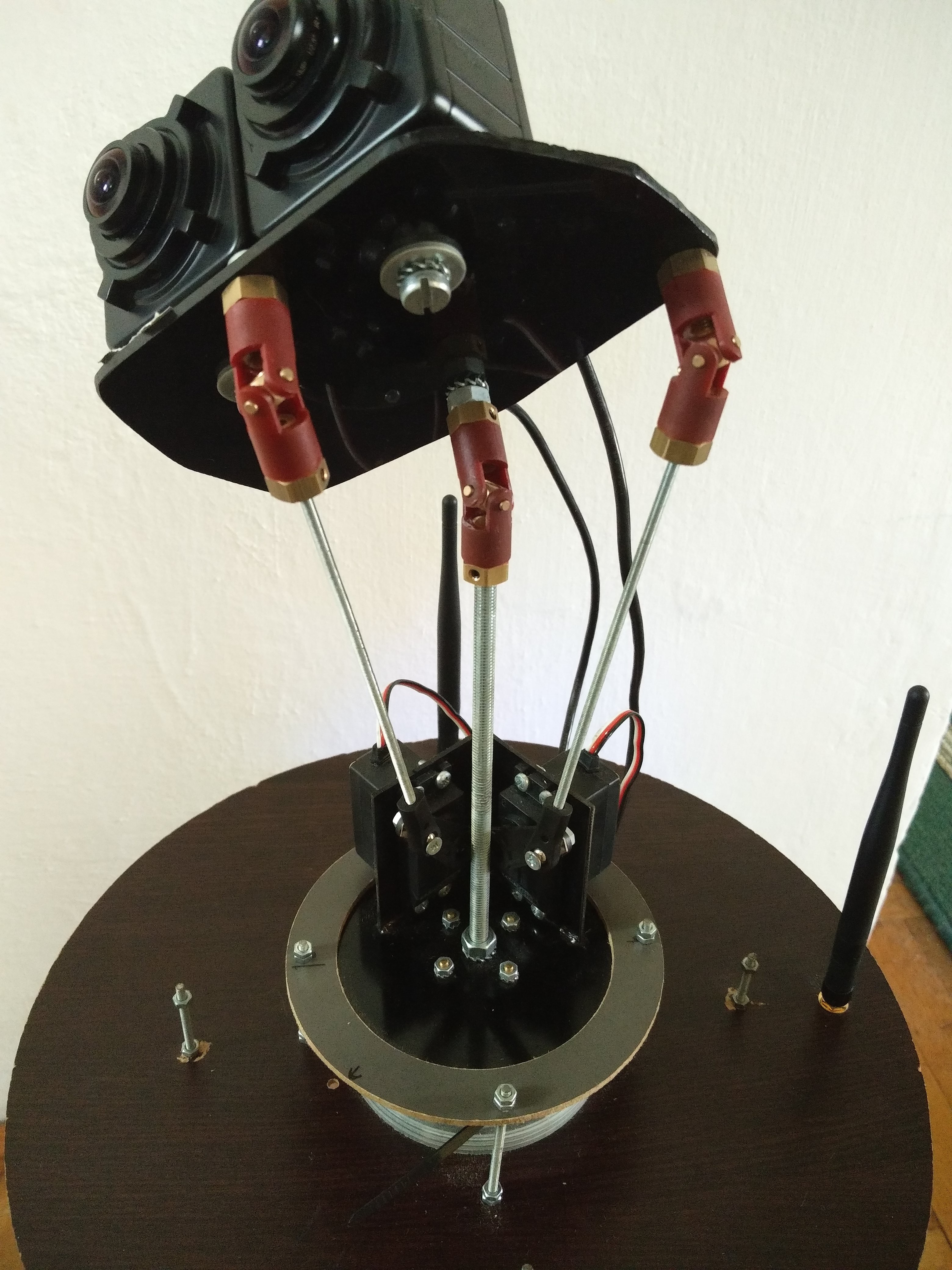
This robot can be used to demonstrate the possibility of the 3D telepresence, and experiment with controlling methods.
It is streaming video on wifi, and listen multiple sockets for head tracking control, and movement control.
Currently we are using HTC Vive for the development, but it can be operated with similar PC connected HMDs.
In the near future we are planning to put a LIDAR on the robot, for autonomous operation.




 Mykolas Juraitis
Mykolas Juraitis
 Diego Balarezo
Diego Balarezo