 Sinclair Gurny
Sinclair GurnyDesign:
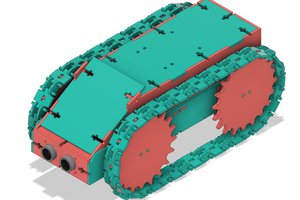
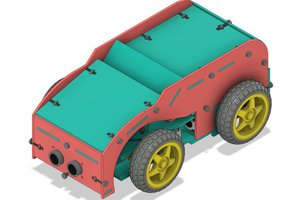
The design for the robot is modular, the motors are attached to a 4 pin connector which allows for different brains or controllers to be attached to the robot. The brain consists of a Adafruit Pro Trinket 5v connected to a dual full H-bridge IC. Which allows for control of both motors and speed control through PWM. The robot is powered through a 3xAAA (4.5v) battery pack from a flashlight with an ON/OFF switch.
Functions:
Simple autonomous navigation: Moves forward until obstacle detected, turn right, loop. I have plans on adding a more throughout navigation program.



 Mike Rigsby
Mike Rigsby
 ssla-couk
ssla-couk
You beat me to it! I have a hexbug sitting in a box, that I bought specially to replace its brains with something a bit more autonomous. Alas, it's been sitting there for a couple of years already. I like how you made it modular, do you plan on building any more behaviors for it?