 vcarter0
vcarter0The teleoperation of robots has seen a massive increase in use in the last few years due to its wide scope of applications, from search and rescue to remote operations by doctors. However, as teleoperation is used for more complex jobs, the traditional control scheme of a joystick and a fixed screen display become clunkier and less intuitive. The aim of my project is to replace this traditional setup with an interface compatible with a head-mounted display, or HMD.
The implementation of HMDs in the teleoperation of robots is not a new concept. In fact, studies on the idea have been conducted since 2001, where army researchers wanted to explore the effect that introducing HMD control of a UAV had on the effectiveness of the subjects as compared to the traditional joystick and fixed screen. The results showed that subjects using HMDs were much slower at search and rescue, but this is because the technology was in its infancy, and the HMDs the subjects wore were cumbersome and harder to maneuver in. However, newer studies have showed promising results. In 2015, researches implemented HMDs to remotely control a robot. They evaluated in both 2D and 3D situations, where for 2D the subject had to read an eye chart to the lowest line they could, and for 3D the subject was tasked to find objects in a maze. The researchers found that while both control methods had relatively the same effectiveness in 2D situations, subjects using HMDs were significantly faster at identifying objects than those using the traditional method. The HMD technology has advanced to a point where it has an edge over a fixed screen display. Additionally, researchers have begun exploring the use of eye tracking to enhance the immersiveness of HMDs. In 2017, developers released a drone camera that could be controlled with a VR headset that shifted the sharpness of the image depending on where you were looking. However, the issue with this study is that the technology only works in well lit, wide open spaces. I want to take my project in the direction of developing a robot that can be maneuvered in enclosed areas that takes advantage of the HMD technology.

 Adrian Prinz
Adrian Prinz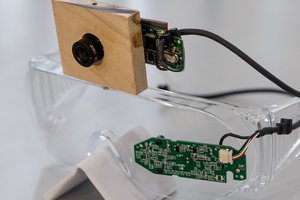
 John Evans
John Evans
 Gregor von Laszewski
Gregor von Laszewski
 Ember Leona
Ember Leona