 Mike Thielvoldt
Mike ThielvoldtCurrent status: Igniton EMI from 1986 distributor causes driveability issues. Currently upgrading to coil-on-plug to mitigate EMI.
Firmware Build tools:
- Visual Studio Community 2013 (free) with Visual Micro.
Interface to the Firmware:
- The Arduino serial monitor
Engines supported:
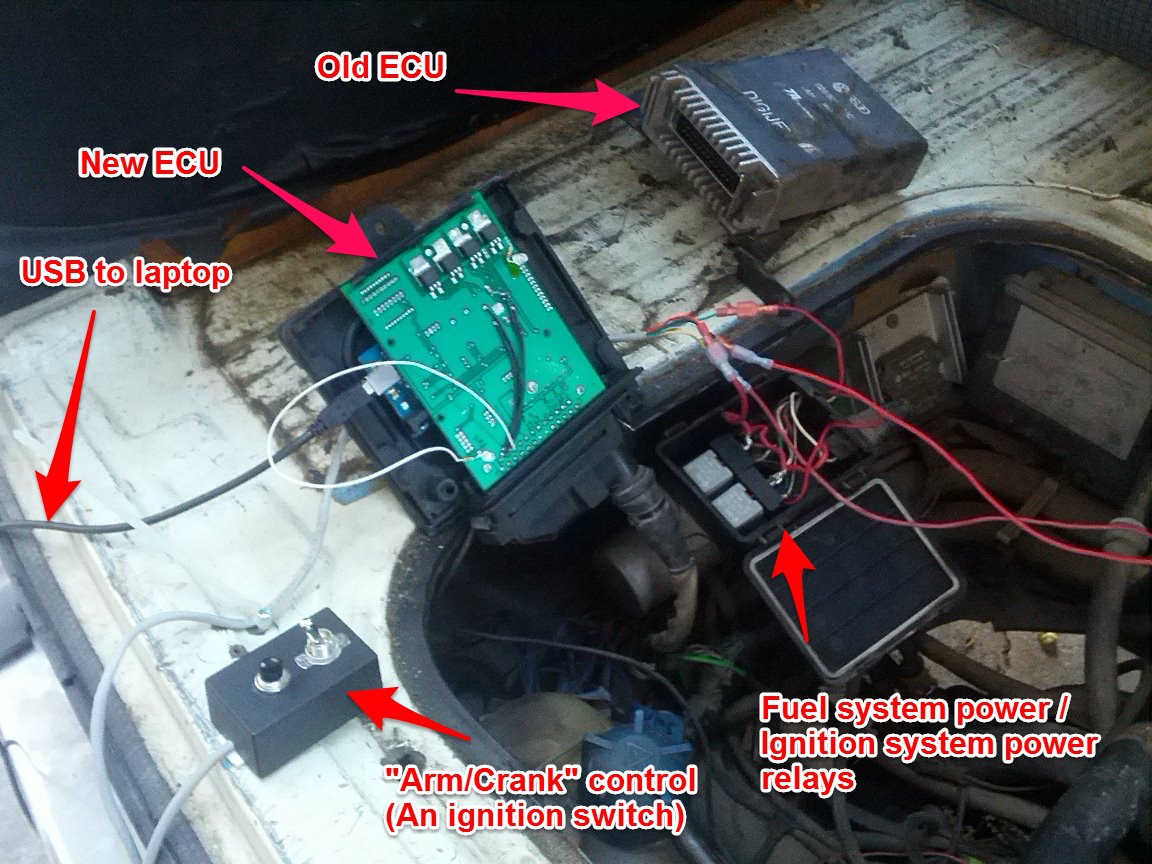
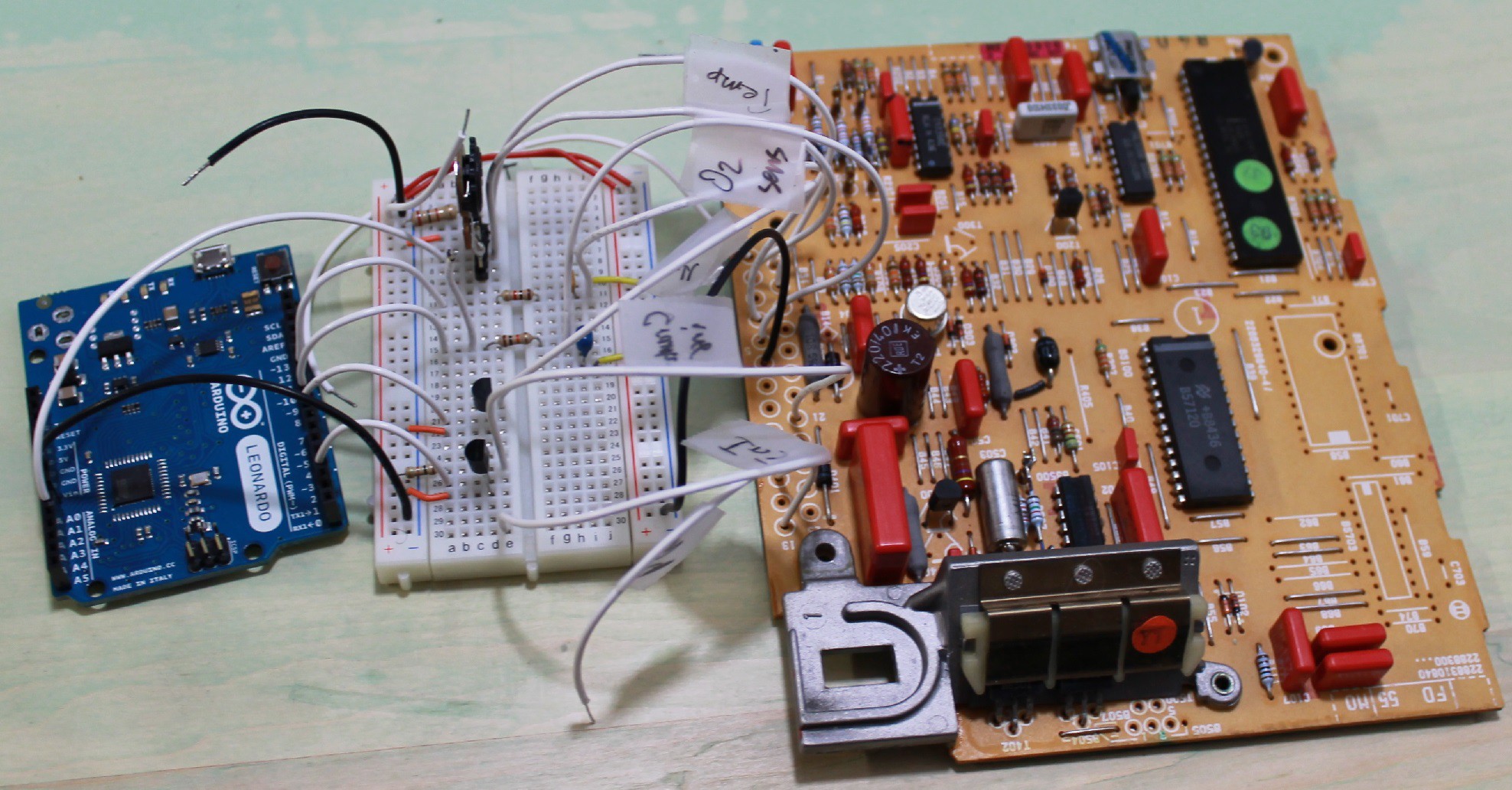
- 1984 VW vanagon gasoline "digijet" (in development)
Control Inputs:
- Stock 1986 distributor for hall-effect signal without mechanical ignition timing
Control outputs
- Injectors : Batch-fire (same as 1984 stock)
- Ignition: ECU controls timing of single coil (with distributor)
- Currently developing: Coil-on-plug system
Auto-tuning
- Adjusts engine map while running (this is unusual among aftermarket ECUs)
- Both global and local (on the map) fuel adjustments happen simultaneously.
- Map changes not permanent unless saved.
- O2 sensor type: narrow-band (1984 stock) O2









 Frédéric Druppel
Frédéric Druppel
 Rory
Rory
 Casual Cyborg
Casual Cyborg
 Hugh Brown (Saint Aardvark the Carpeted)
Hugh Brown (Saint Aardvark the Carpeted)
Great Project. I was dreaming up the same approach yesterday evening for my vintage 1984 Westfalia, then proceeded to check for any previous work. Voilà ! Your project.
Have you progressed with coil-on-plug ?