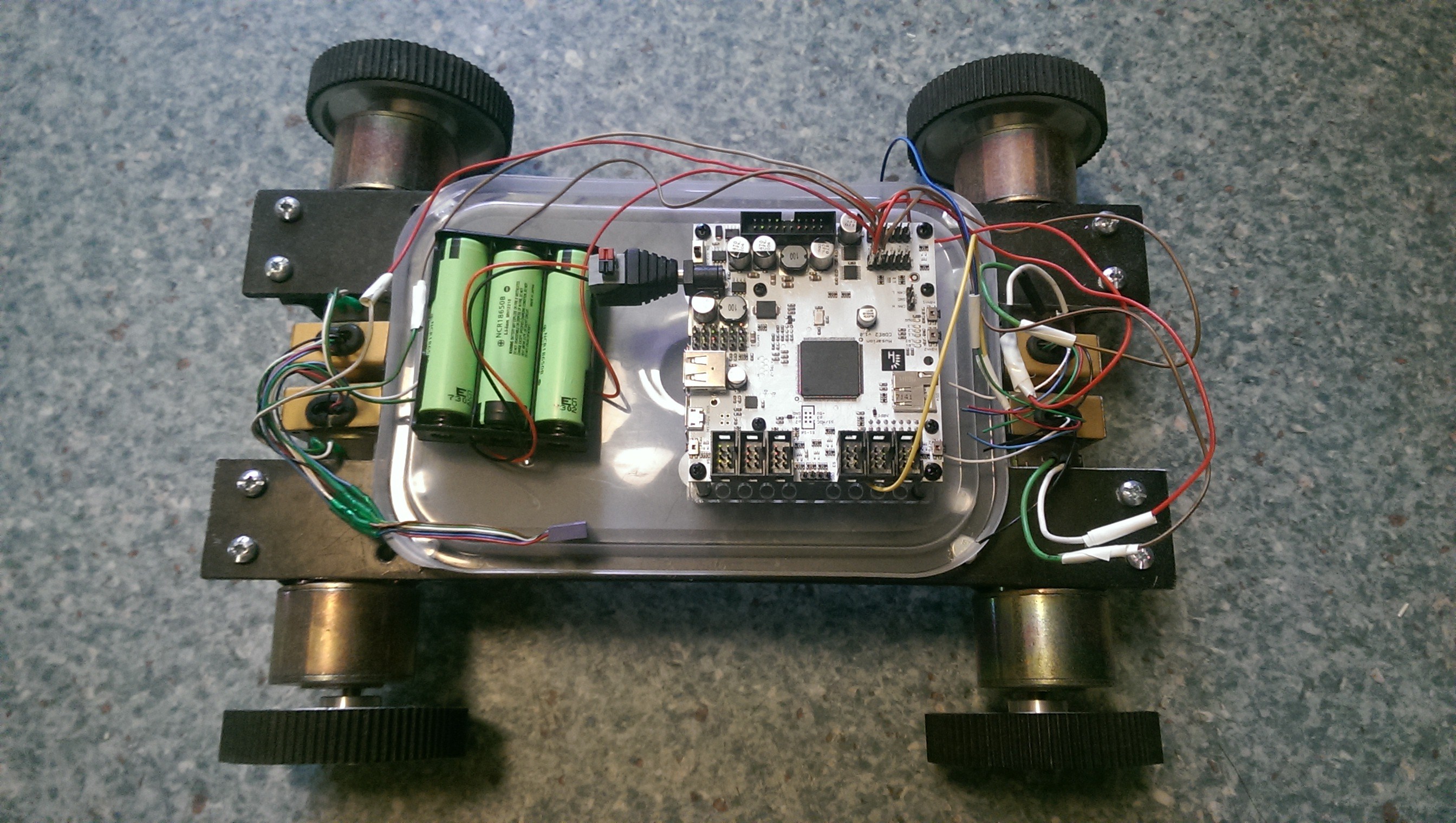
This robot was used for my engineering diploma. It is able to move around, record (and/or) show the user the image from the front camera and create a map using the RpLidar. It also has a ROS based control system.
The main unit used to power this thing was a CORE2 made by Husarion. Big thanks to this company for creating such a great robot programming platform.



 Dave Niewinski
Dave Niewinski
 Augusto
Augusto
 codersilver
codersilver