Introduction
I want to make tracking mirrors that reflect sunlight from my garden into my home. The light will warm up and light the floor. This should heat up the house with 1000 W/sq meter of outside mirror surface (peak power), and provide light as well.
Mirror Support
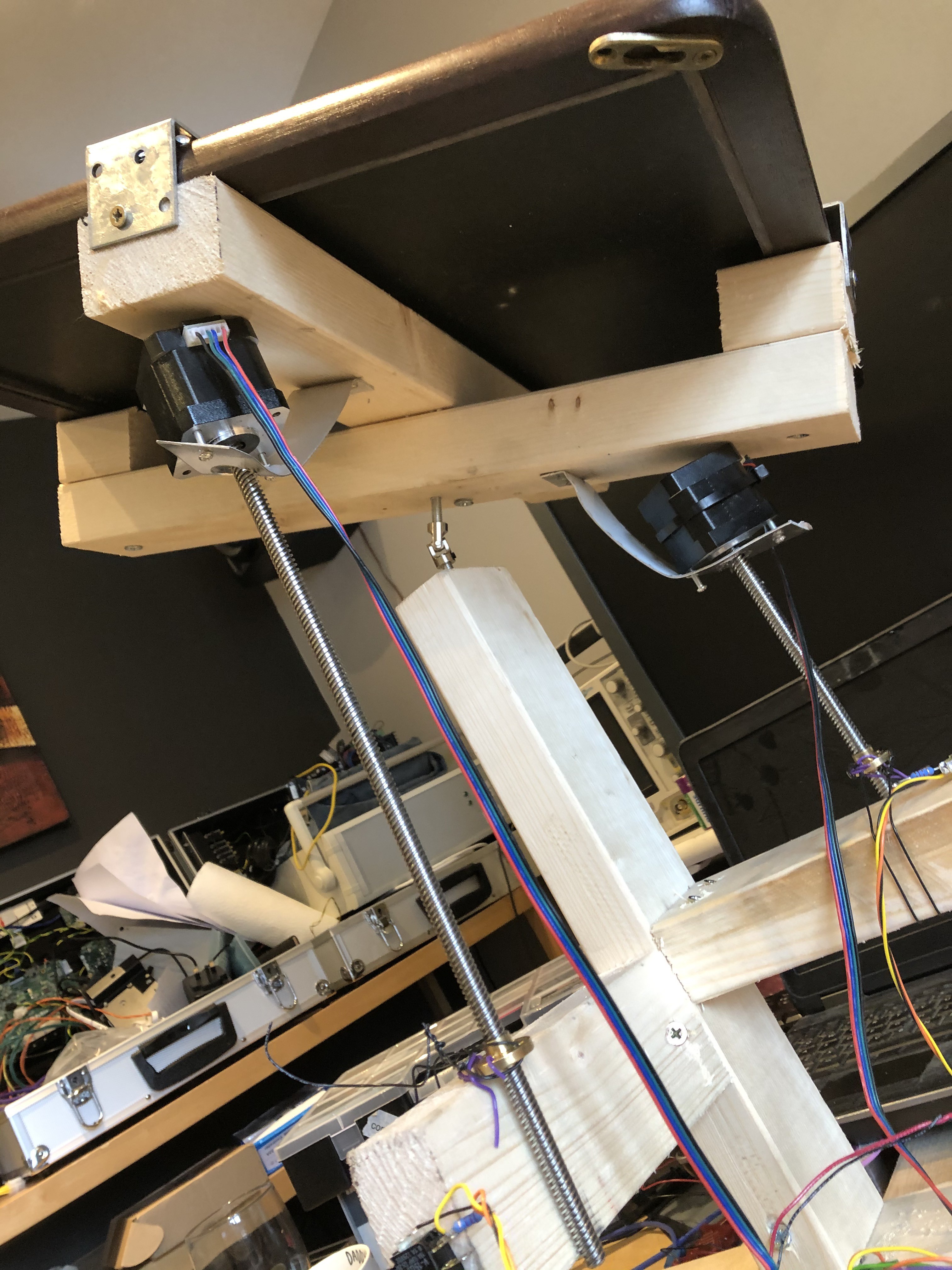
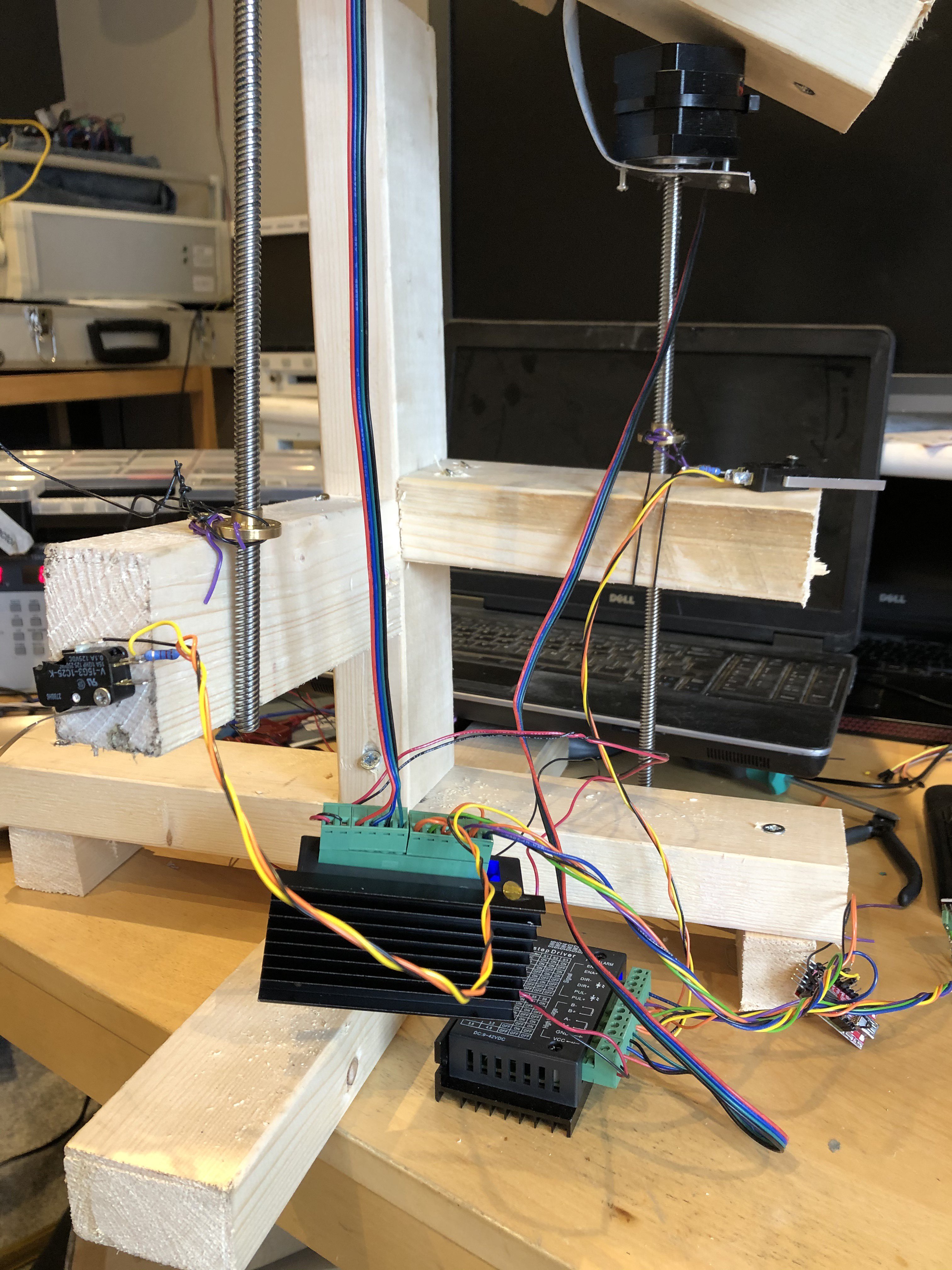
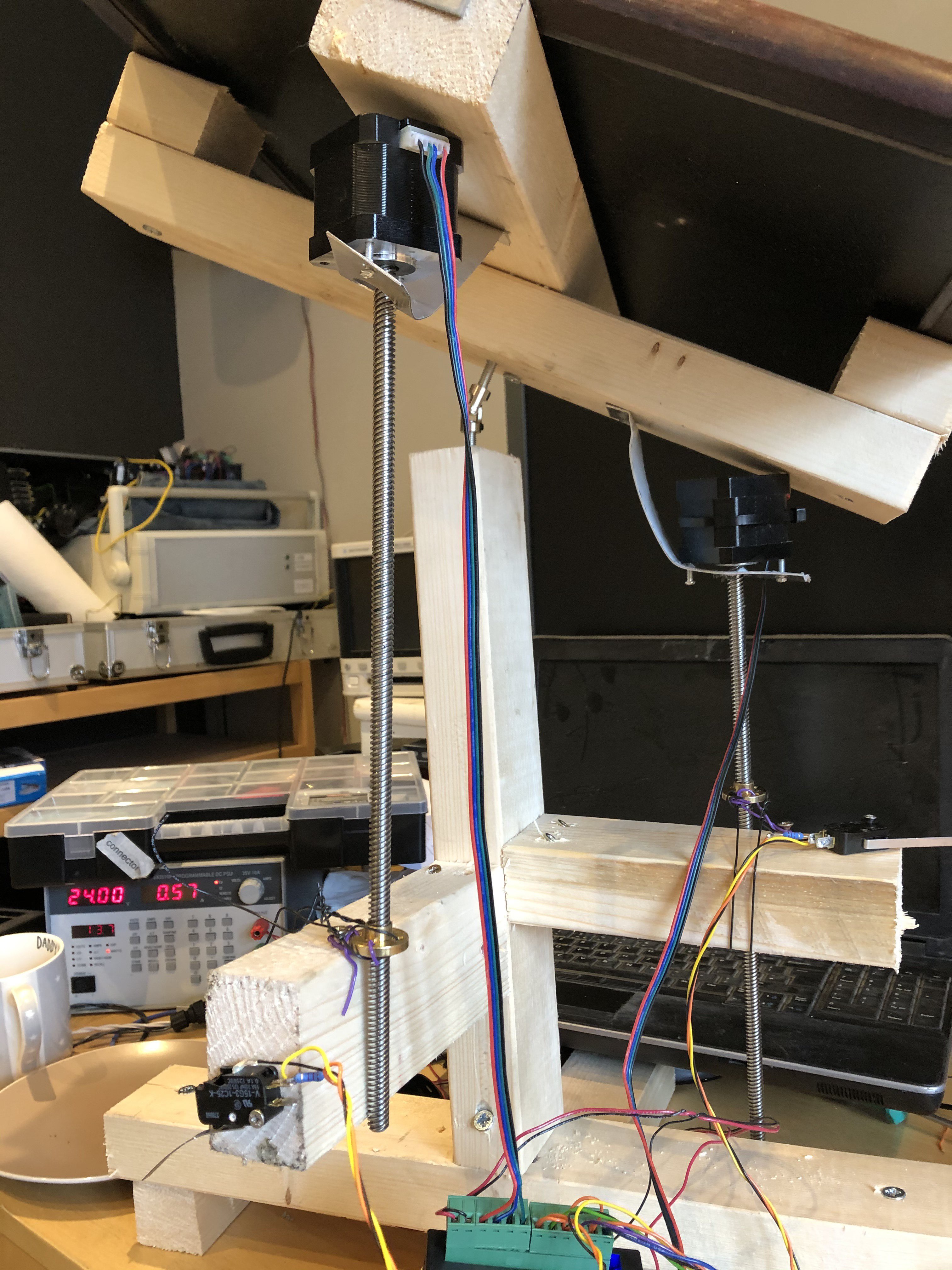
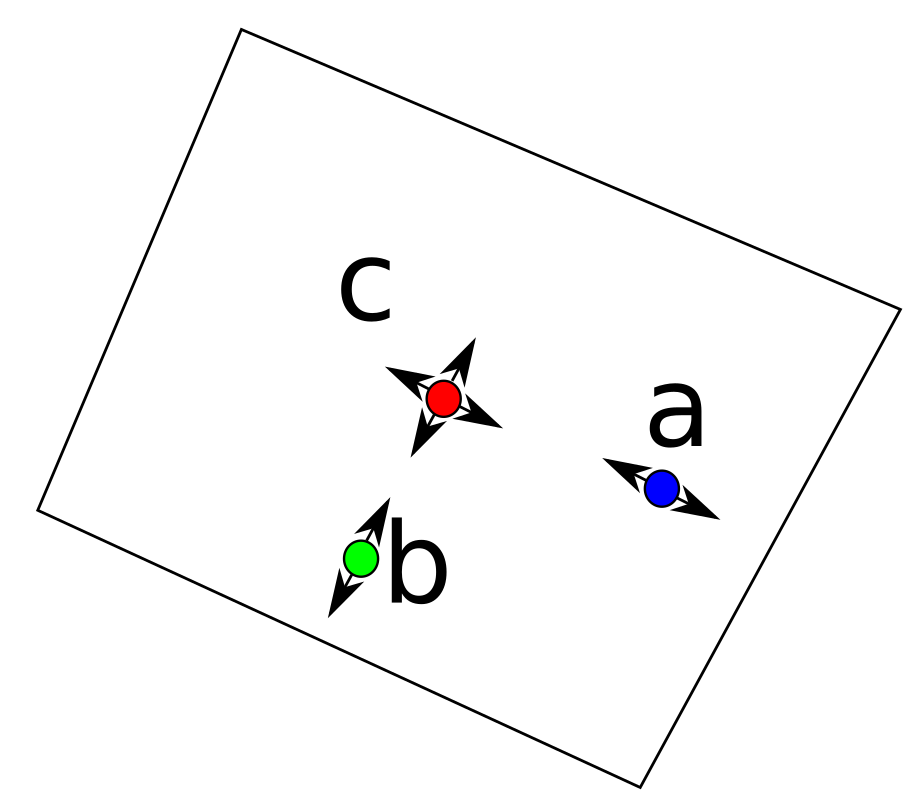
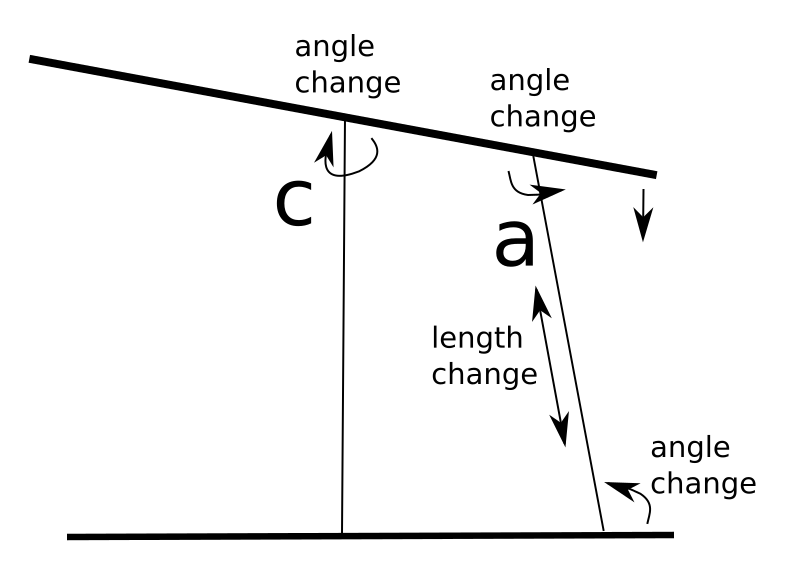
I will make one prototype mirror first. The mirror will be mounted on a frame.
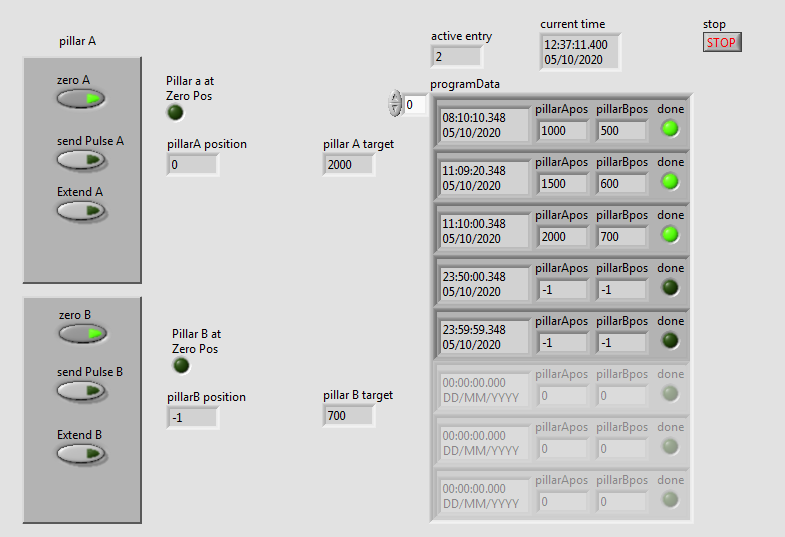
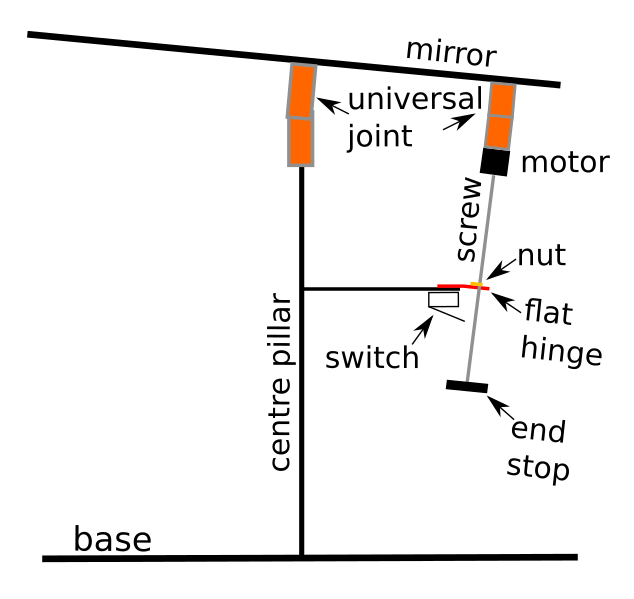
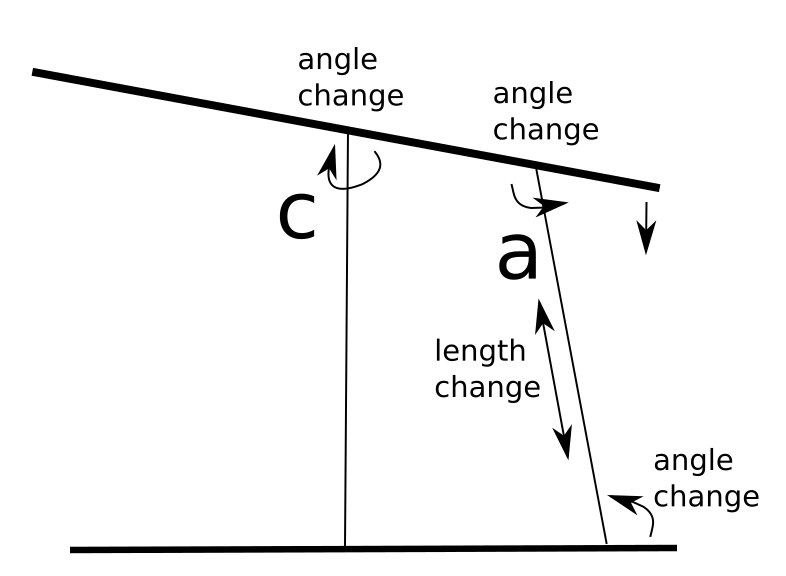
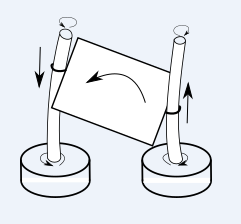
At the moment I plan for each frame to have three supporting three pillars: one fixed pillar, and two adjustable pillars, which will be controlled by automatic motors attached to long screws.
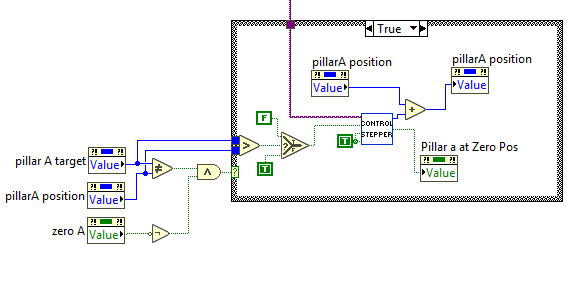
I originally planned to use linear motors because they are easy to control, but I've decided to use steppers instead.
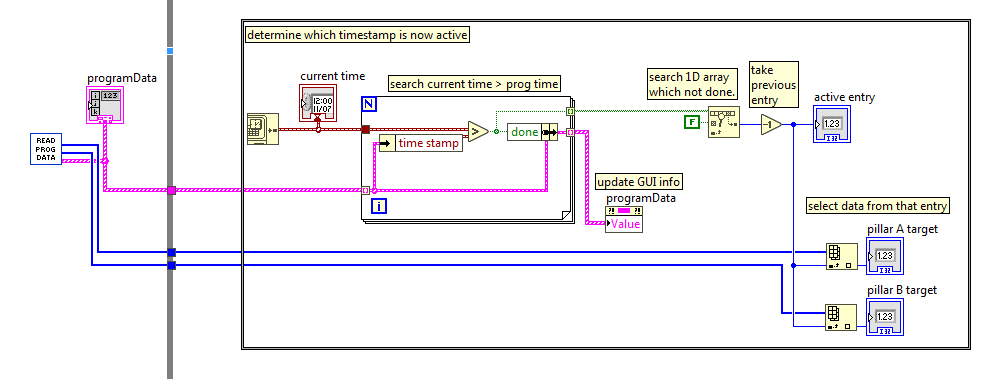
Mirror Tracking Control
Originally this was my plan:
"
To control the automatic motors I need to have a processor dev board that has a Real Time Clock (RTC).
To measure the length of the motors I need to have extension/position sensors. I have experience of using sliding capacitive sensors for that.
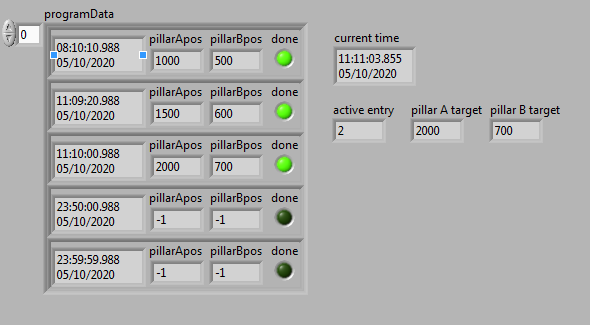
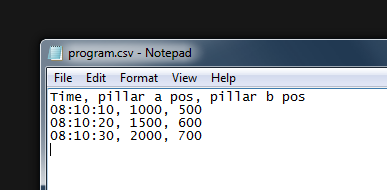
I will program each mirror at several times per day (for instance, each half hour), and then the mirrors should automatically adjust their position based on the time, perhaps by interpolation. A program will consist of a table with time in the first column, and pillar lengths in column 2 and 3. Programming will happen over RS232 or USB.
Each tracking mirror will have a battery, and the batteries may be charged using a solar panel.
"
But in order to make it easier, the stepper motors allow me to get rid of the position sensor, and all the control is now using the a PC or laptop.

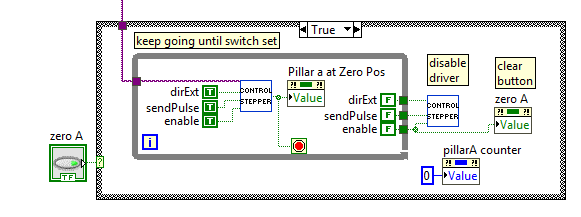
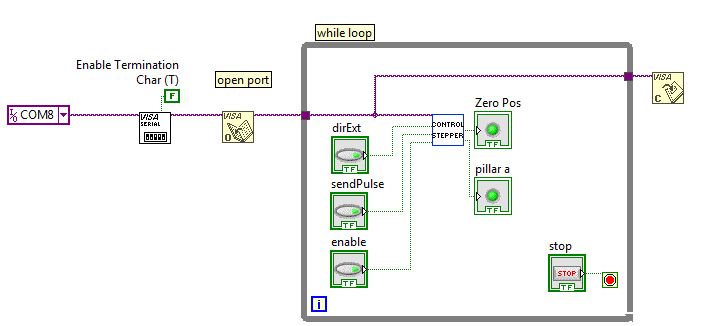
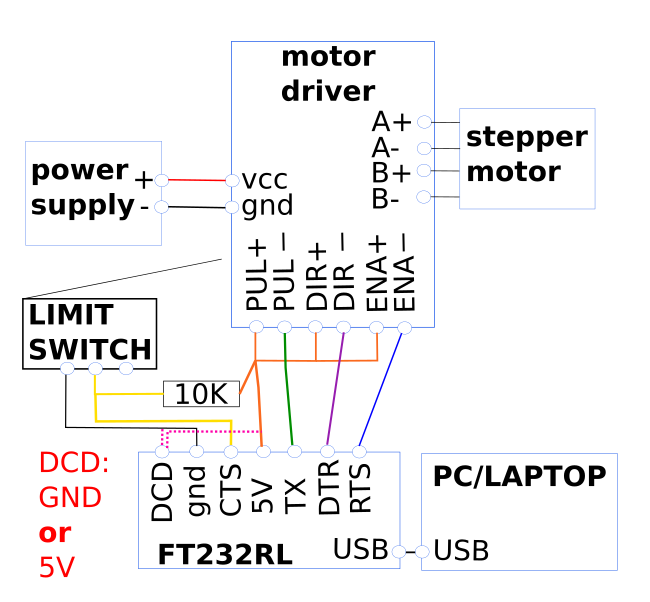
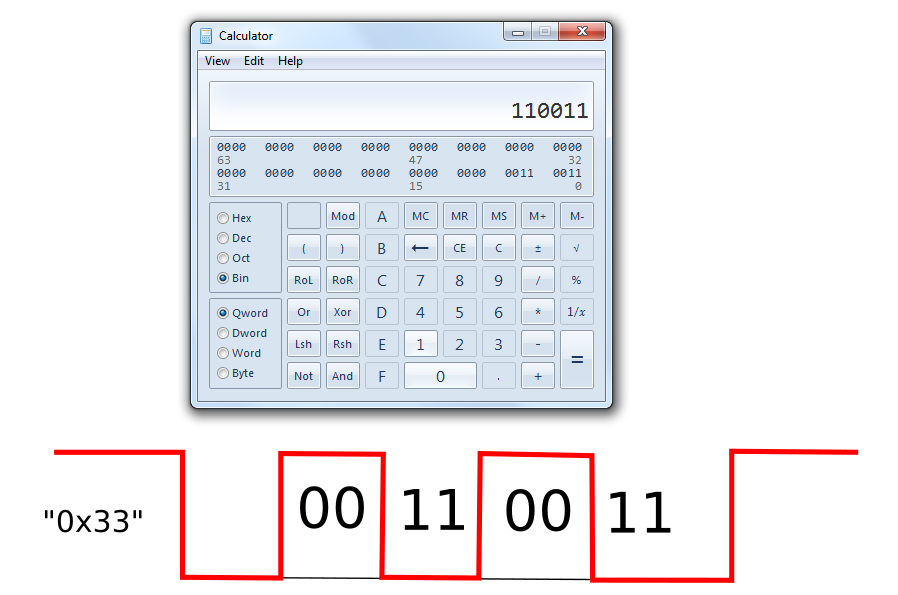
 That's right, we will use el-cheapo USB to UART converters to control motors. Normally, these converters are used to send serial characters, and we'll "creatively use them" to create motor pulses instead. In order to understand how, we'll have to dive a bit deeper into serial port signals.
That's right, we will use el-cheapo USB to UART converters to control motors. Normally, these converters are used to send serial characters, and we'll "creatively use them" to create motor pulses instead. In order to understand how, we'll have to dive a bit deeper into serial port signals.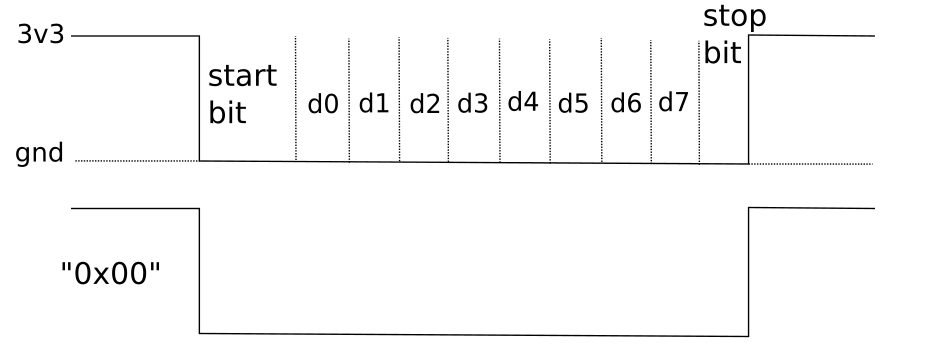










 Jarrod
Jarrod
 Lucy Fauth
Lucy Fauth
I've been wanting a system like this for my (north-facing) garage and basement. I would rather send the light up to bounce off the ceiling, though. 3M makes a special window film that does this, but since your system would have control over the light direction, it would be an easy modification.
Also, I believe it should be possible to make a tracking mirror that needs no computing power, using light sensors, comparators, and MOSFETs.