 Jean-François Duval
Jean-François DuvalHello Hackers!
In the same spirit as my quarter-finals project update, here’s one post containing all the information for the next judging round. Please excuse the repetitions!
- Video: FlexSEA - Hackaday Prize Semifinals (that's the one embedded above)
- Video: Prof. Hugh Herr talking about the FlexSEA project
- You can get a copy of the software projects and the hardware design files.
- In terms of system design document, please refer to my thesis. It contains extensive details about the hardware and the software. It's a great snapshot of the design as of May 2015.
- For more detailed design descriptions, consult the numerous Project Logs that I wrote about critical aspects of the project.
- As far as licensing goes, the thesis is licensed under Creative Common Attribution-NonCommercial-ShareAlike (CC BY-NC-SA 2015) and the hardware files are Open Source Hardware. Drop me a line if you use them, I’m curious to know about your projects.
- Last time I linked to a short video shot by my colleague and friend Luke testing a strain-gauged based force controller on FlexSEA-Execute 0.1 for his exoskeleton. Much more exciting, here’s a video of him walking with one of his exoskeleton prototypes! You can also see his latest work in my Semifinals video.
- I started working on the next hardware revision, FlexSEA-Execute 0.2. All the details are in Working toward FlexSEA-Execute 0.2. The wide-input range power supply (18-50V in, 10V out, 82%+ efficiency) PCB is being manufactured right now, and a good part of the gate driver test board is designed. Exciting times!
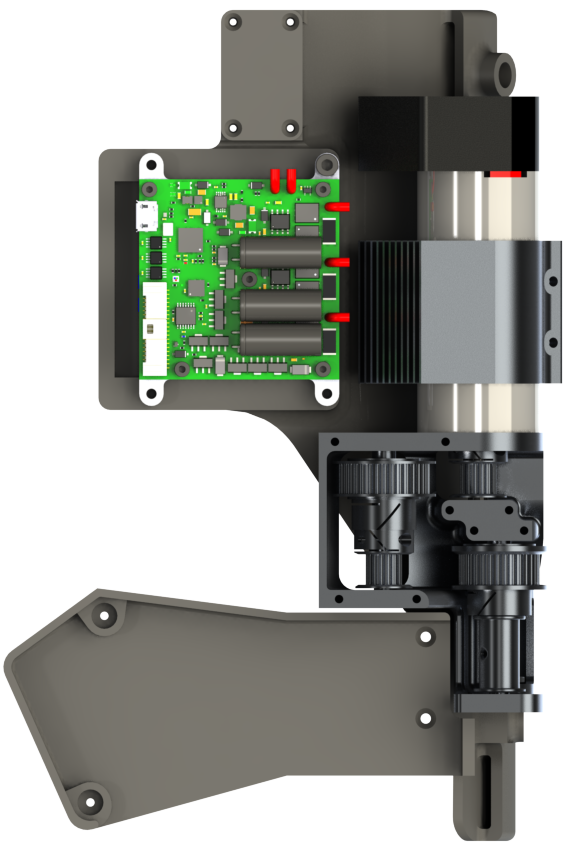
- One of the requirements is “artist’s rendition of the “productized” design/look and feel of the project”… Does beautiful layout and 3D CAD qualifies as art? I bet it does. In The evolution of FlexSEA prototypes I show pictures of the 3D design, and below you’ll see a screenshot of Execute integrated in the ExoBoot.
- Do not hesitate to ask me questions about the system in the comments below!
- I'm looking for contributors for the project. Drop me a line if you are interested.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.