0%
0%
Robot Arm | Interfacing 3Dconnexion Spacenavigator
Interfacing a 3Dconnexion Spacenavigator to Linux and mbed to control a small Robot arm built with Lego technic
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Víctor Mayoral Vilches
Víctor Mayoral Vilches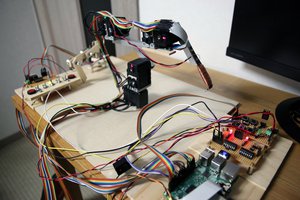
 Tobias Kuhn
Tobias Kuhn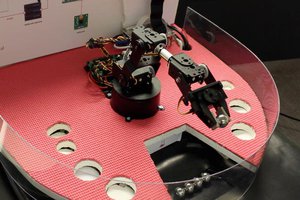
 Alex Crooks
Alex Crooks
Can anyone please share the script that reads /dev/hidraw* and parses it into usuable information. thanks