0%
0%
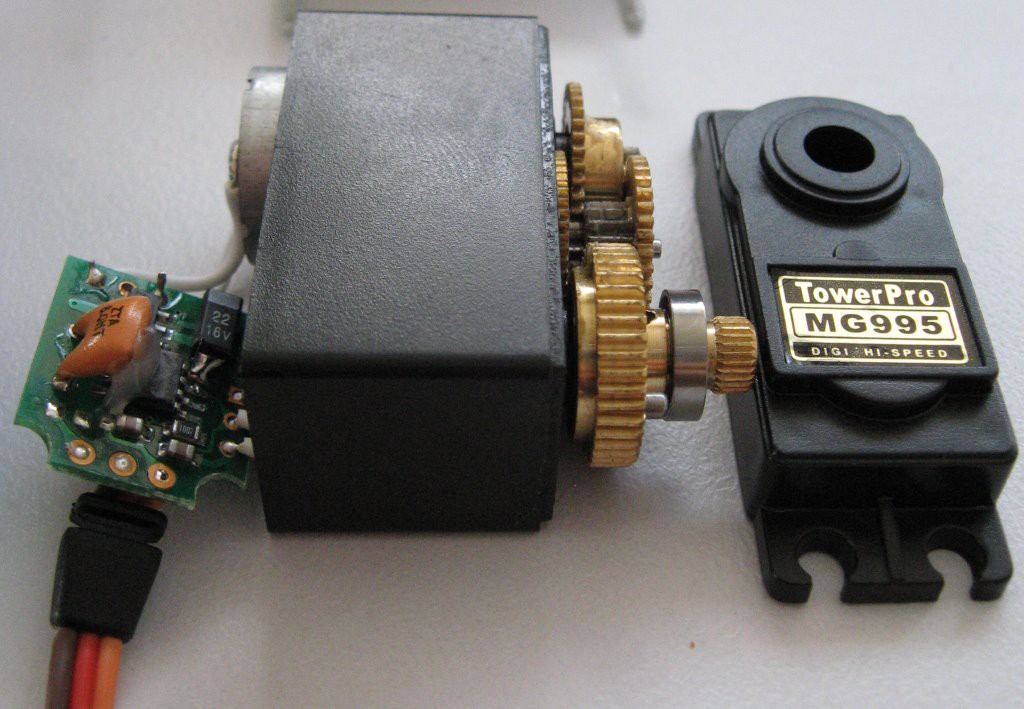
127 TowerPro Servos, one I2C interface.
Taking the cheap and strong TowerPro MG995 servos (and siblings) and reprogramming them to accept commands and report position via I2C.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Hulk
Hulk
 Shranav Palakurthi
Shranav Palakurthi
 Mike
Mike
 John Lonergan
John Lonergan
Any issues with noise on the I2C lines? Great idea!