 Stefan-Xp
Stefan-XpHere are some general goals:
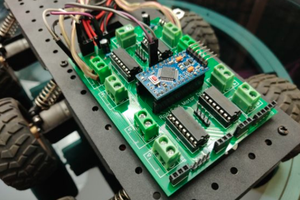
- By modular i mean, it consists of 1 ... 3 Parts.
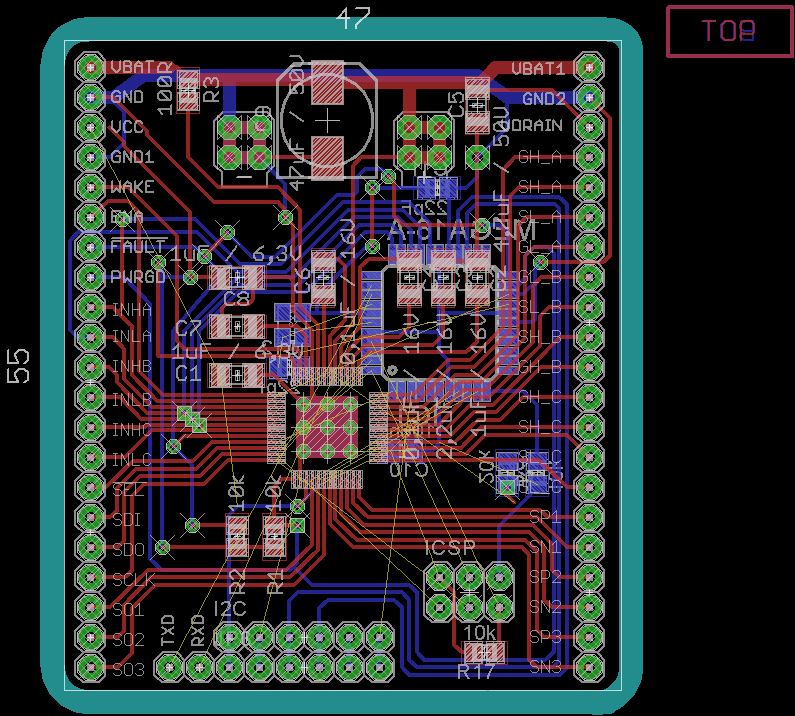
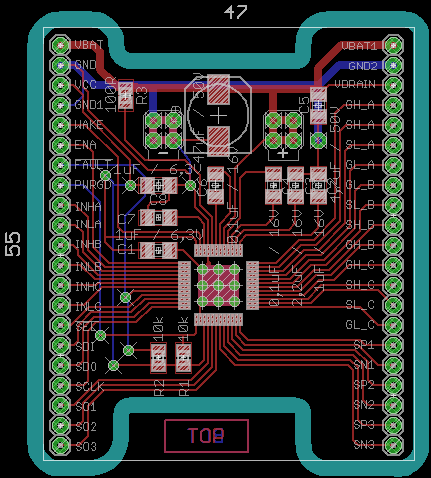
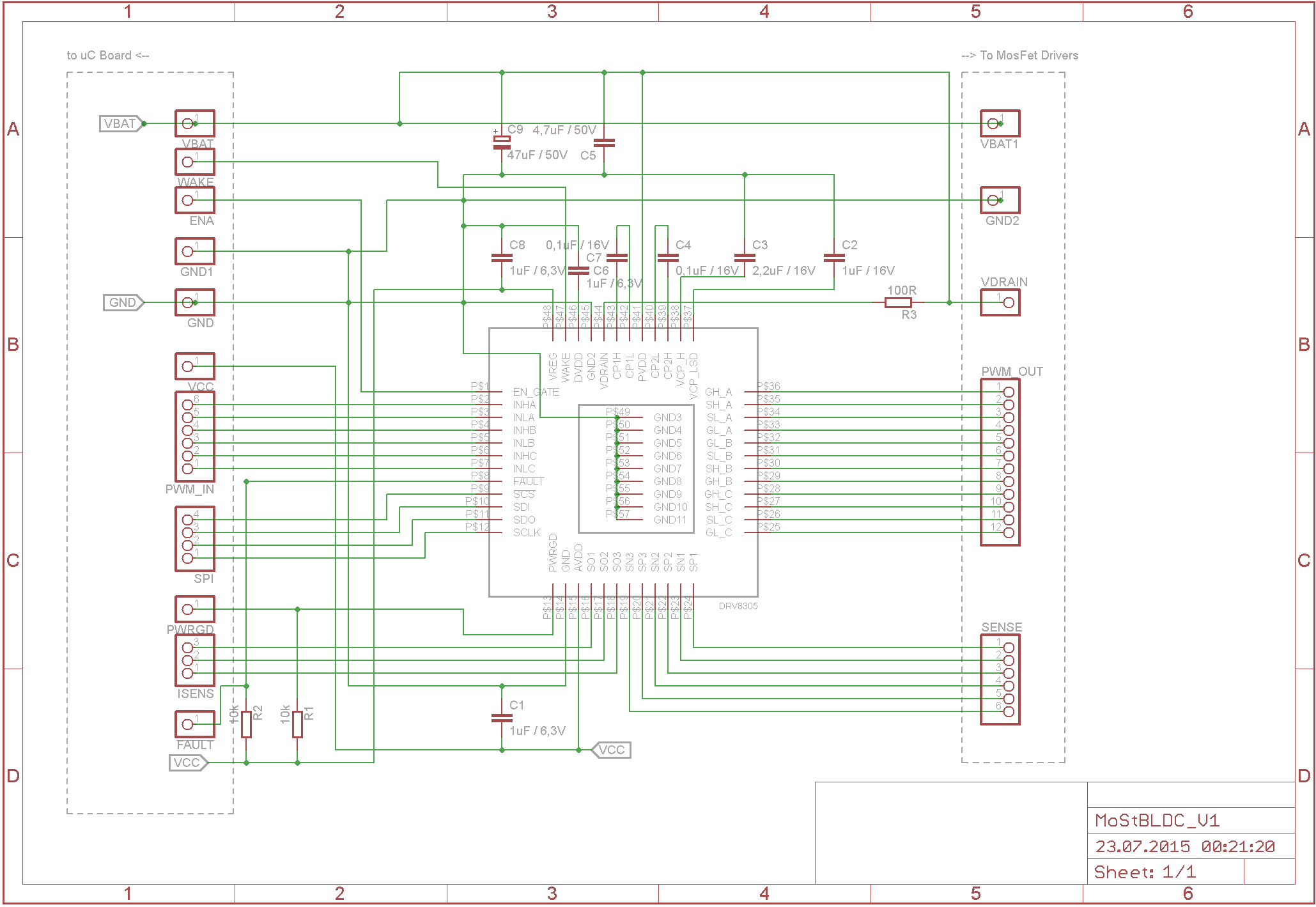
- Mainmodule with µC (Mostlikely ATMEGA, and Arduino compatible) and Motor PreDriver (DRV8301DCAR)
- Module for Buscommunication (Interfaces UART, I2C and SPI (so you could also interface it directly) f.Ex. LIN, CAN, K-Line, "Servo"
- Module with Driver Stage - Depending on the Load it can be bigger or smaller (MOSFETS) (Interfaces Gate Drivers and Sense)
- By smart i mean, it could broadcast the Driver and Motorstate etc.
- You could also use the MoStBLDC in Standalone use cases without deeper understanding and controlling of BLDC Motors.
I really enjoy the DRV8301DCAR since it handles all the critical driving Stuff and has an advanced Algorithm included. Also a big Plus are the SPI Interface and the BuckConverter.
 Jithin Sanal
Jithin Sanal
 Jan
Jan
 Jonathan Perry-Houts
Jonathan Perry-Houts
 Karol
Karol