 Michael Ratcliffe
Michael RatcliffeFeeding Fish Is a very time consuming task, taking skilled operators to visit sites multiple times a day and is prone to human error or implementation of inefficient feeding routines to save time. A computer could perform this task day in day out repeatable, efficiently and without human interaction, saving time, food and increasing yields from a system drastically.
If the potential benefits are so good, then why has no one already done this? I can only give you my opinion on this. The task of feeding fish is a complicated one, many variables and environmental factors effect the feeding of fish [see below] and fish farming is a pretty boring subject.
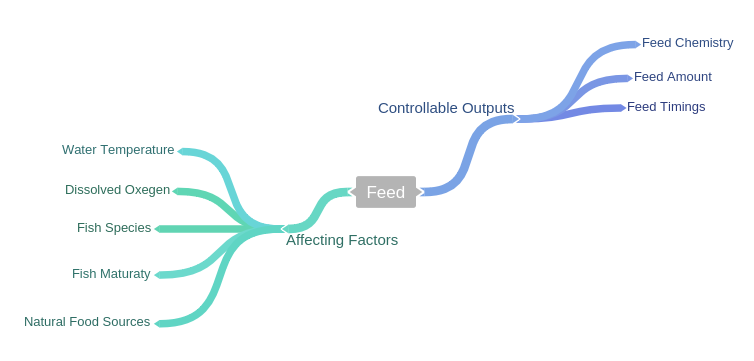
As you can see from the chart above the variables are numerous and sometimes hard to measure. Luckily a lot of these can be defined/measured and represented mathematical.
Feed Spacing/Timings: The optimum time between feeding of fish depends on the size of the stomach of the fish, when they are young they require feeding regularly, decreasing as they grow larger.
Feed Amount: The amount in percent body weight to feed the fish daily is largley influenced by the water temperature and the age of the fish. These are the inputs needed for the open loop controller. The vision based feedback does not need to know this, it will use the rate of food consumption to mimic a skilled human feeder.
Feed Chemistry: the percent of protein you fed fish is related to the age of the fish and the water temperatures.
A Note On DO: Dissolved Oxygen measurements are expensive, measuring probes need constant calibration and as such we will be assuming the pond has adequate oxygenation for growing fish. Spreading the feed serving over the day will spread the demand for DO over the day also. So in short, feeding multiple times a day decrease the peak demands for dissolved oxygen of the system. [this is a good thing]
Useful Links for the Automated Feeders:
>DIY Feeder Mechanical Proportion
Open-Loop
Work Done:
>Code for Feed Amount vs Temperature
>Wiring Diagram
>How-to measure the feed-rate of your feeder
>Sourced housing for final product prototype
Work To Do:
>Implement gps to allow feed timings implementation
>Build into the housing
>Increase type of fish from just Tilapia
Camera Feed-Back
Work Done:
>Proved that food can be identified by the camera and OpenCv on Raspberry Pi
>Proved that Feed Delivery Rate can be changed by PWM
Work to Do:
>Control loop to keep constant amount of food in pond, making note of duty cycle
>Test at what time during decrease in PWM the fish are full for optimum growth
>Implement a simpler arduino version for the IBC Aquaponic growers out there
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.