0%
0%
CNC Plotter From Robot Chess Game
A broken robotic chess game is easily turned into a CNC plotter. Can be cheap, depend on what you have.
 Rocketburns
RocketburnsBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
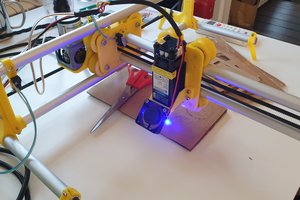
 I added a dry-erase board to it so I could just erase any problems and start again (I apologize for blurriness, my camera was acting weird, but you get th idea):
I added a dry-erase board to it so I could just erase any problems and start again (I apologize for blurriness, my camera was acting weird, but you get th idea):
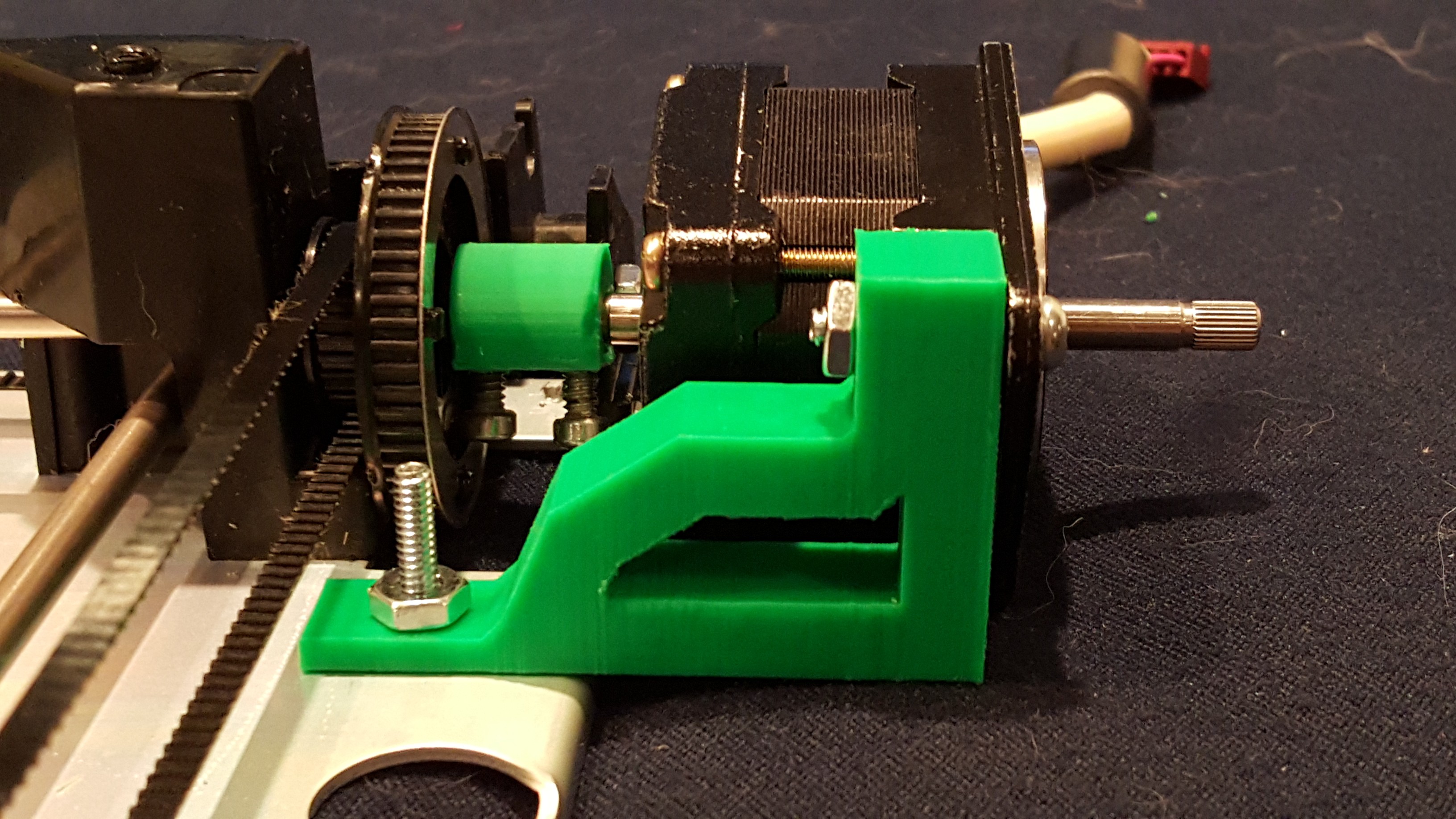
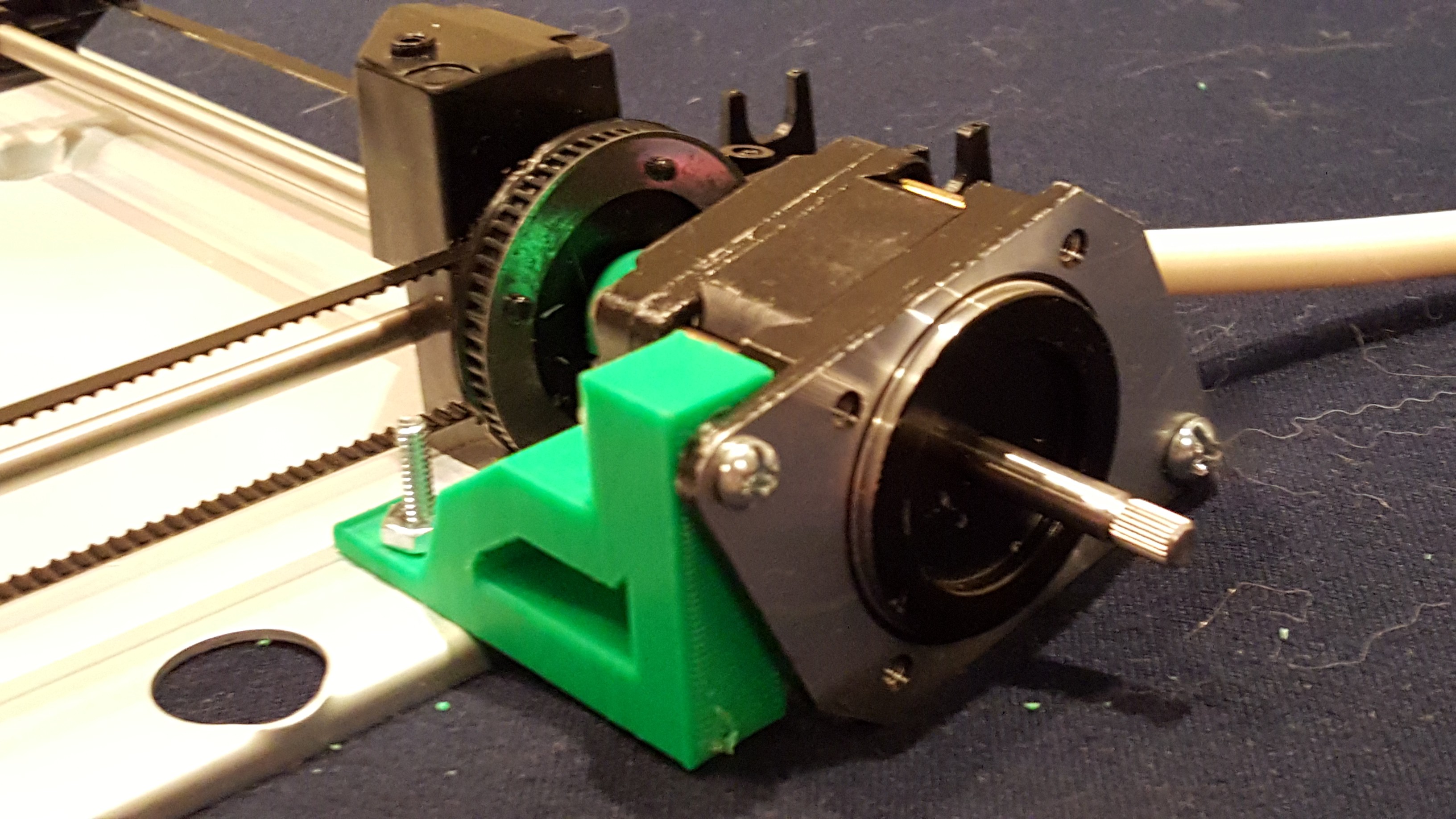
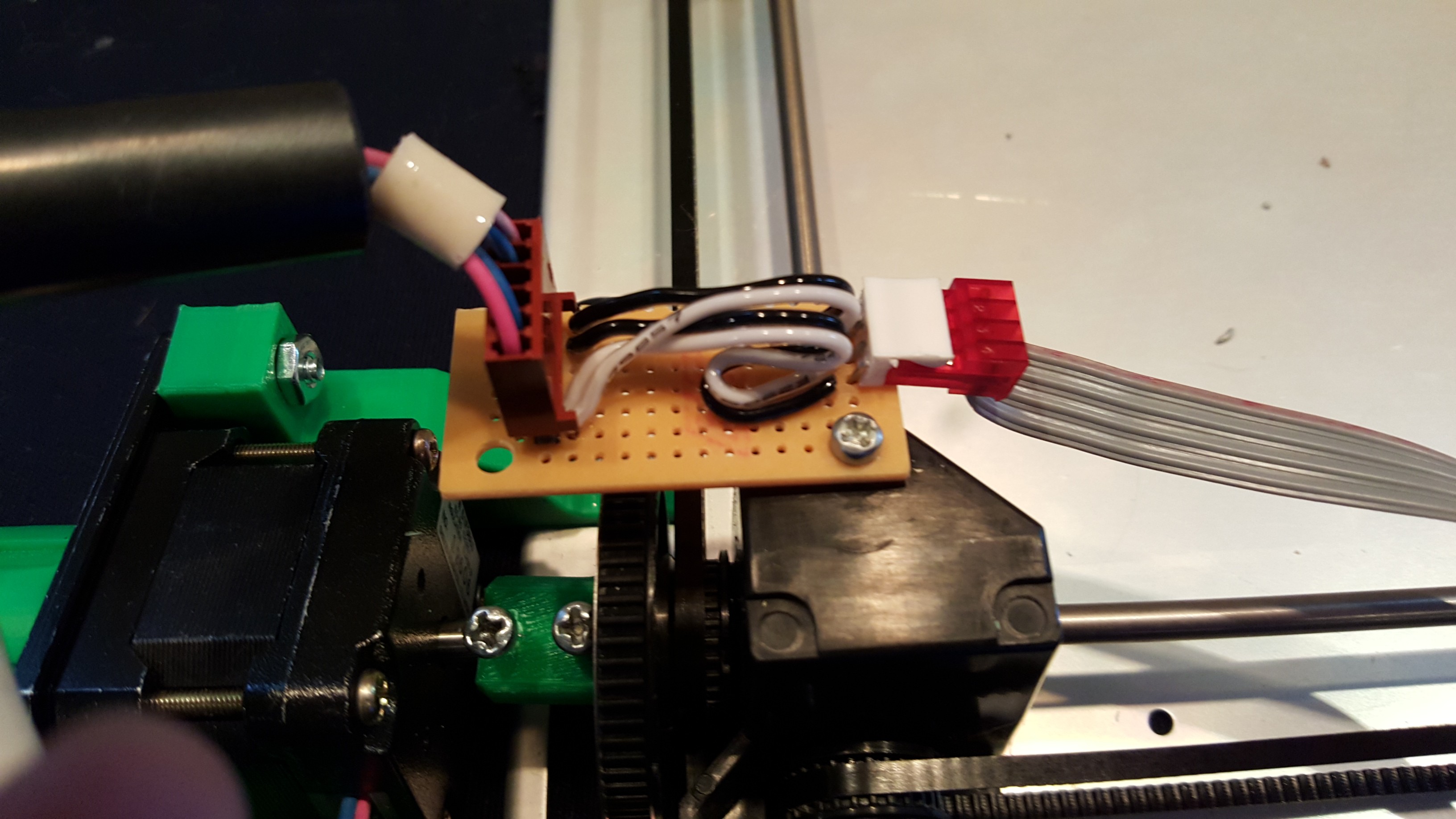
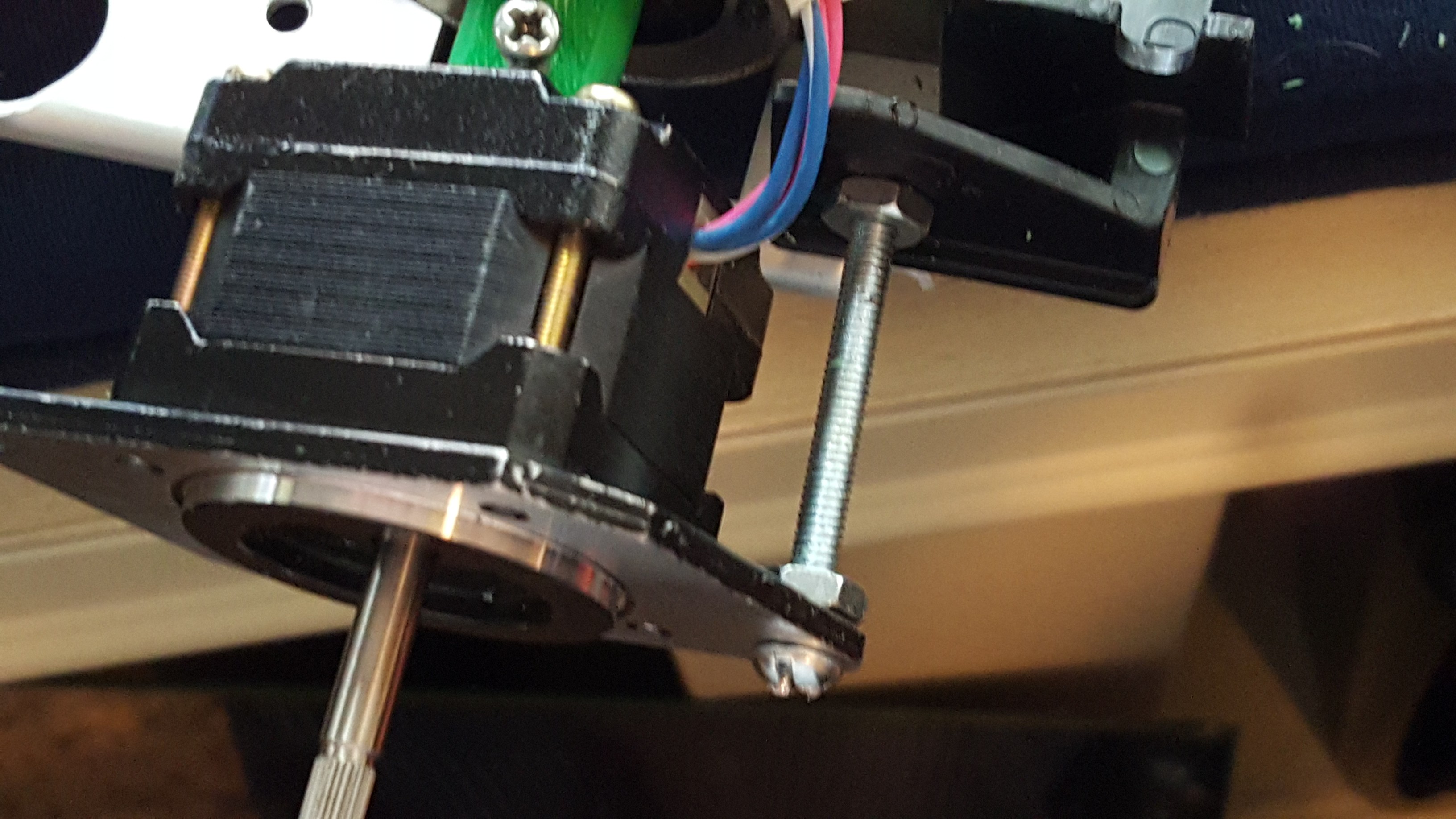
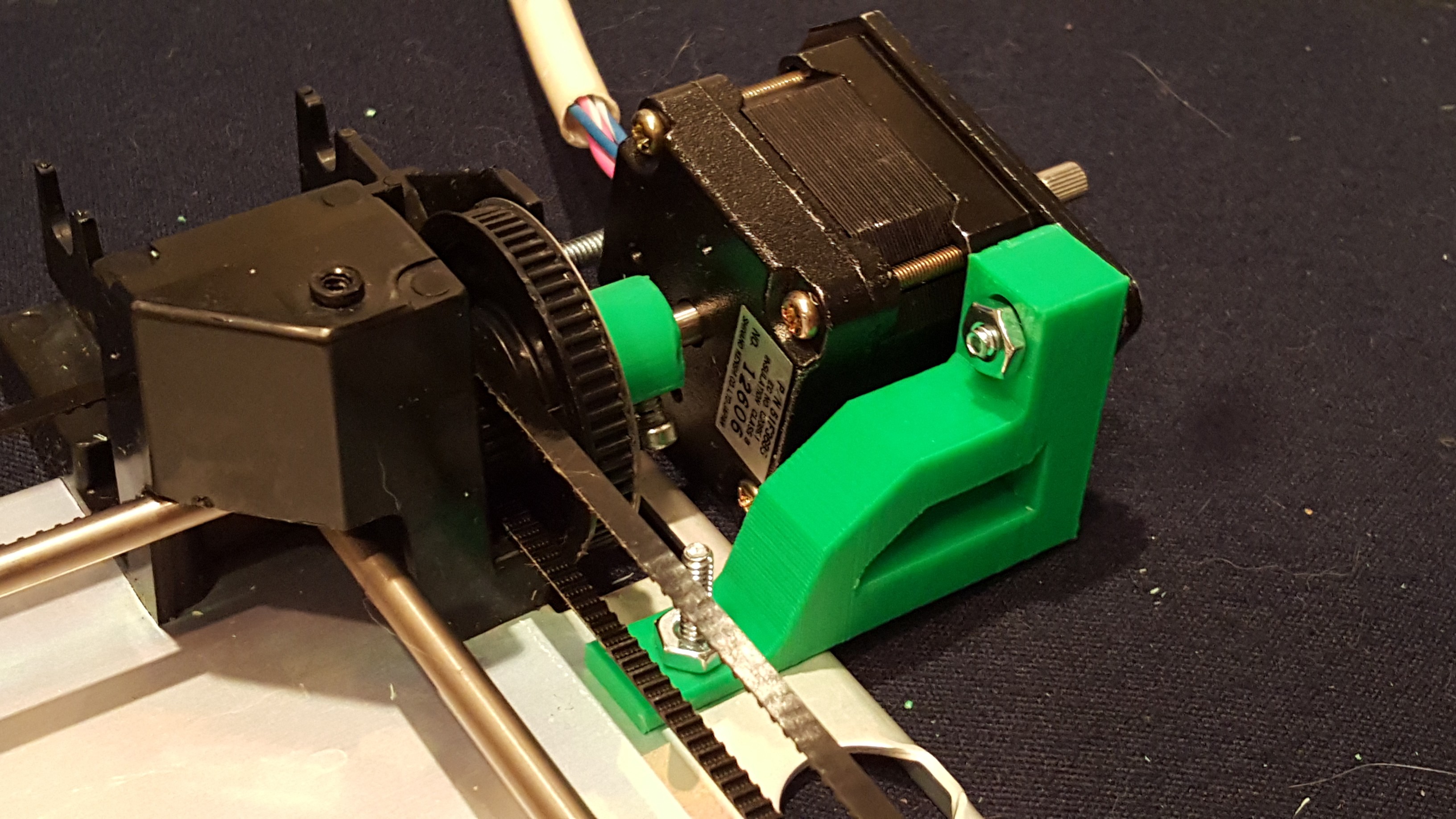 This addition completely removes any play from the stepper motor, before this it tended to wobble around due to it only being held on by one point. There is room for improvement in the model, however, because while it functions nicely it is a little bulkier than it needs to be, and could definitely be streamlined. I may print a standoff to cover the exposed screw on the other side, mainly just for aesthetic purposes.
This addition completely removes any play from the stepper motor, before this it tended to wobble around due to it only being held on by one point. There is room for improvement in the model, however, because while it functions nicely it is a little bulkier than it needs to be, and could definitely be streamlined. I may print a standoff to cover the exposed screw on the other side, mainly just for aesthetic purposes.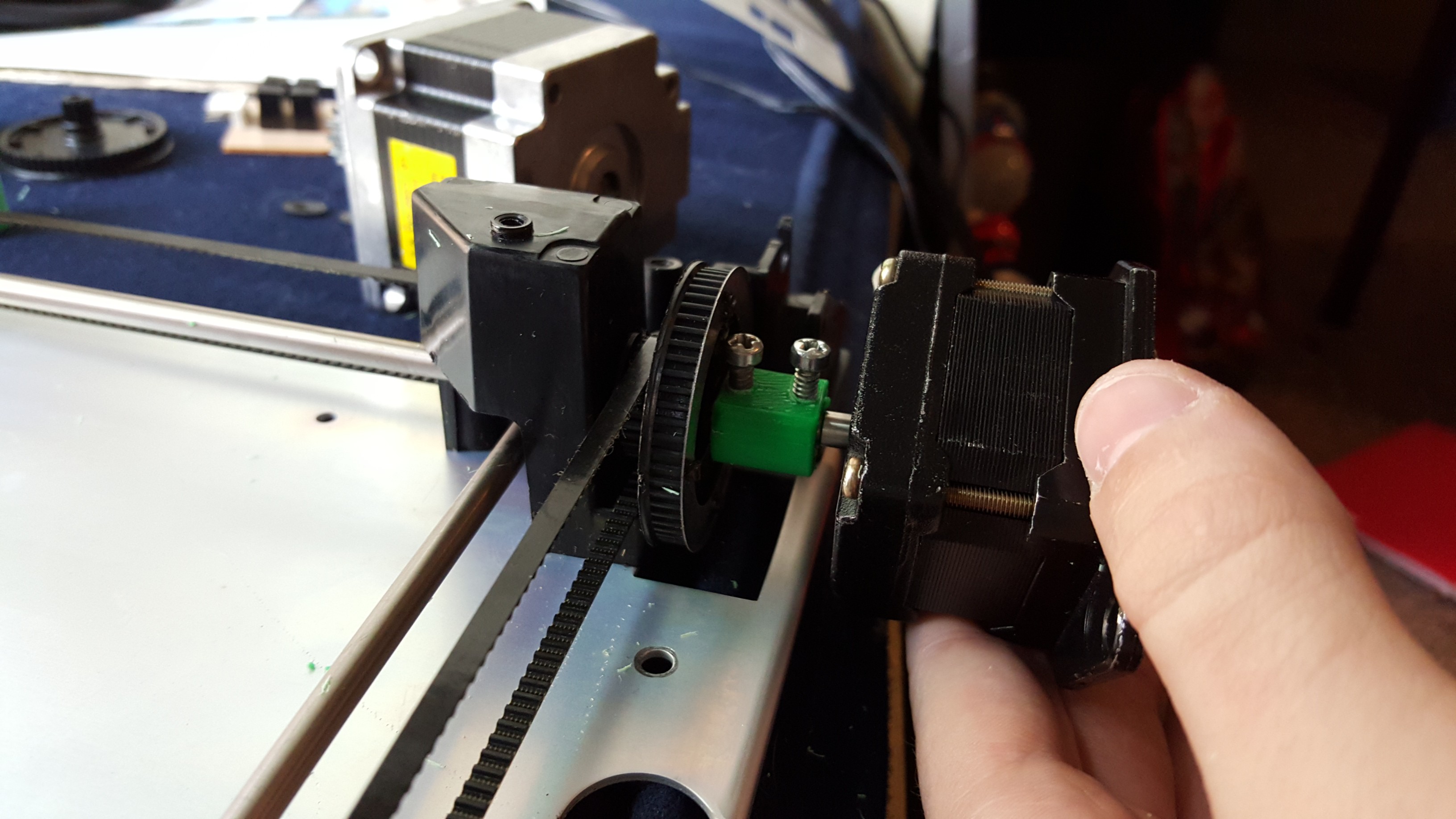
 Maximiliano Palay
Maximiliano Palay

 Krockwell
Krockwell