 Fredrik Markström
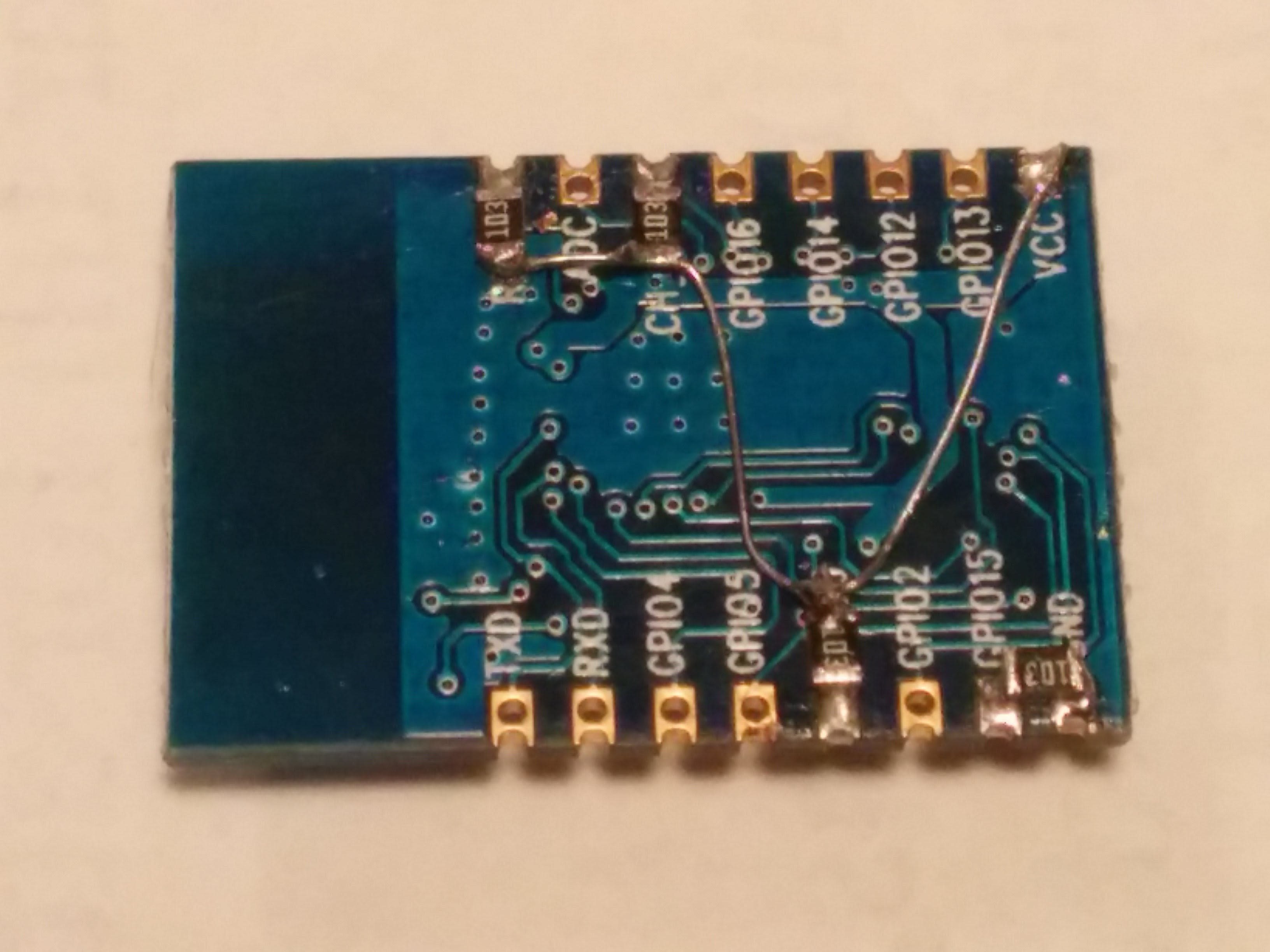
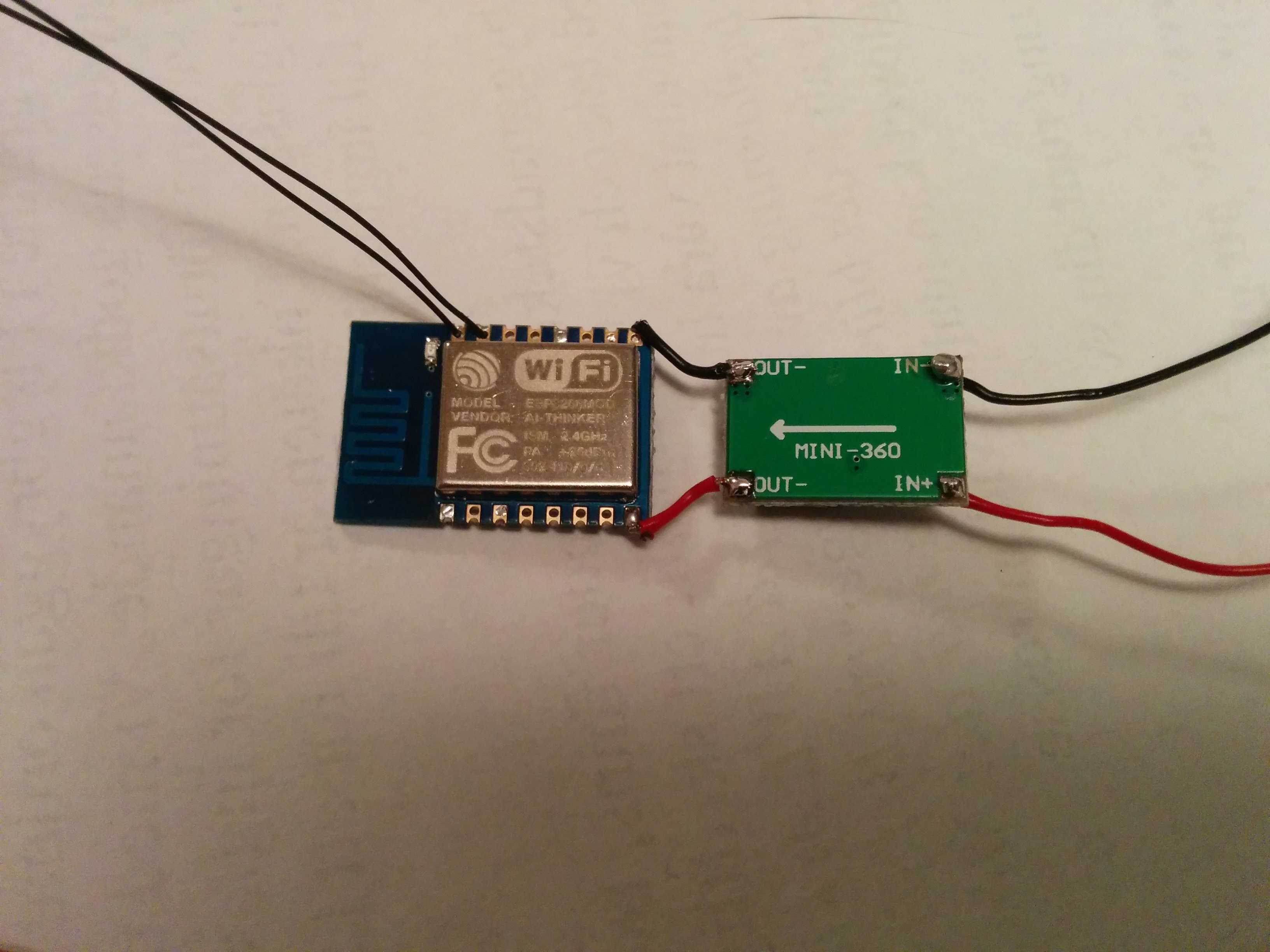
Fredrik MarkströmIn this project I add an ESP8266 (ESP12) inside my Roomba to get full control over it. Included is firmware with a web-interface, json-api, OTA(over the air updates), NTP and slack support.
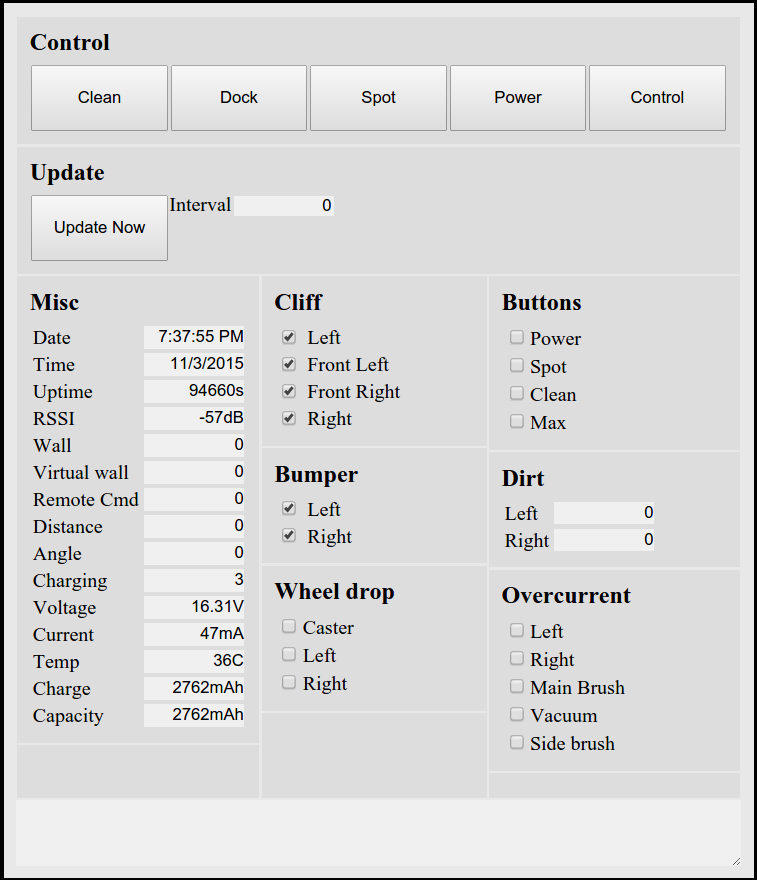
At the moment it presents sensor values and statistics in a web interface and let you control it. In addition it sends Slack notifications when it starts, docks or gets stuck.
But, the possibilities are endless, a few of the ones I can think of are:
- Use sensor values and and WIiFi/RSSI for location/mapping of room/apartment.
- Create your own navigation/vacuuming algorithm.
- Add more advanced timer functionality.











 James Harding
James Harding
hmm, another promising project is dead