 The Big One
The Big OneSome points of interest of this project:
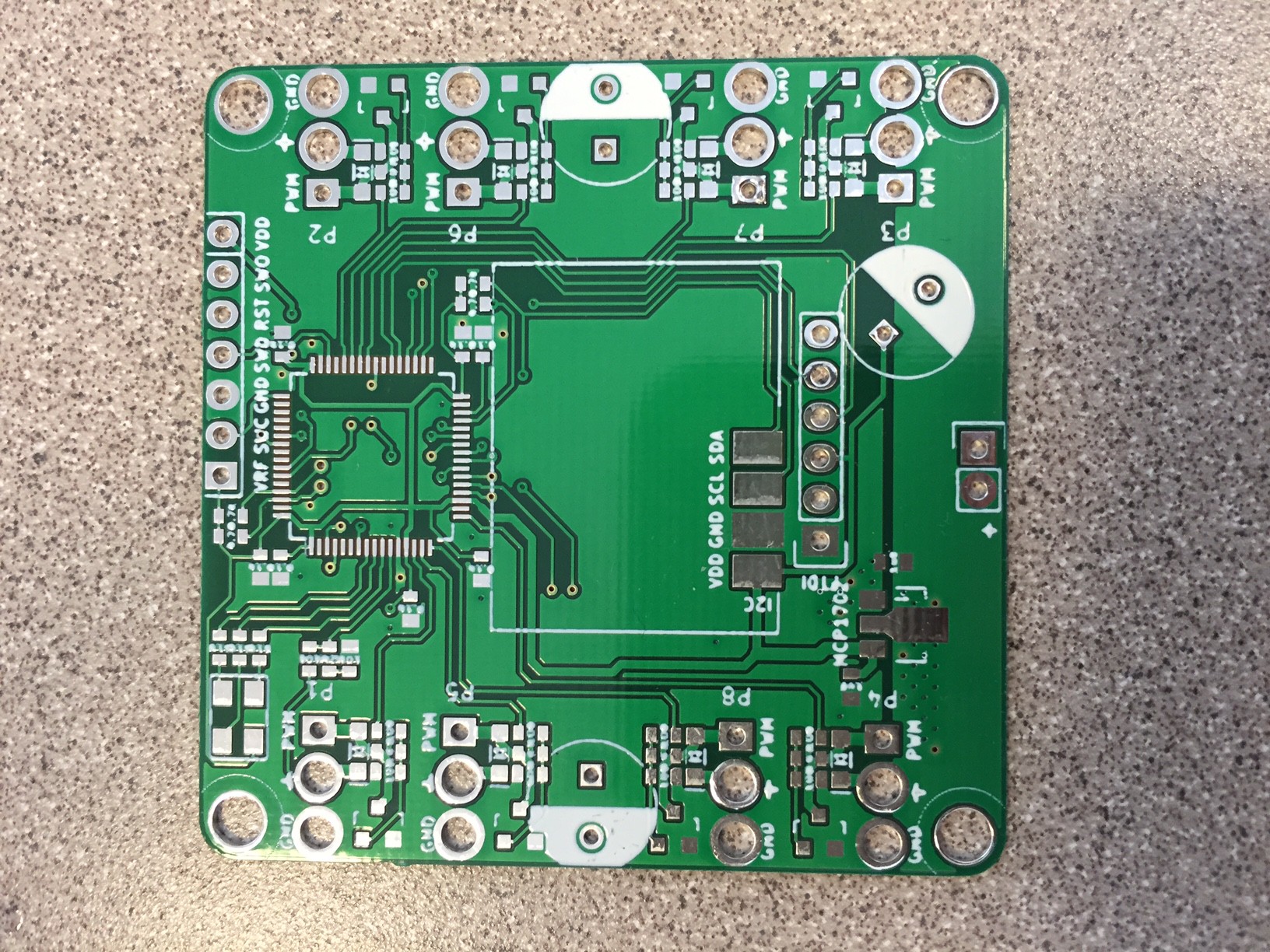
- Flight controller is ATMega32u4
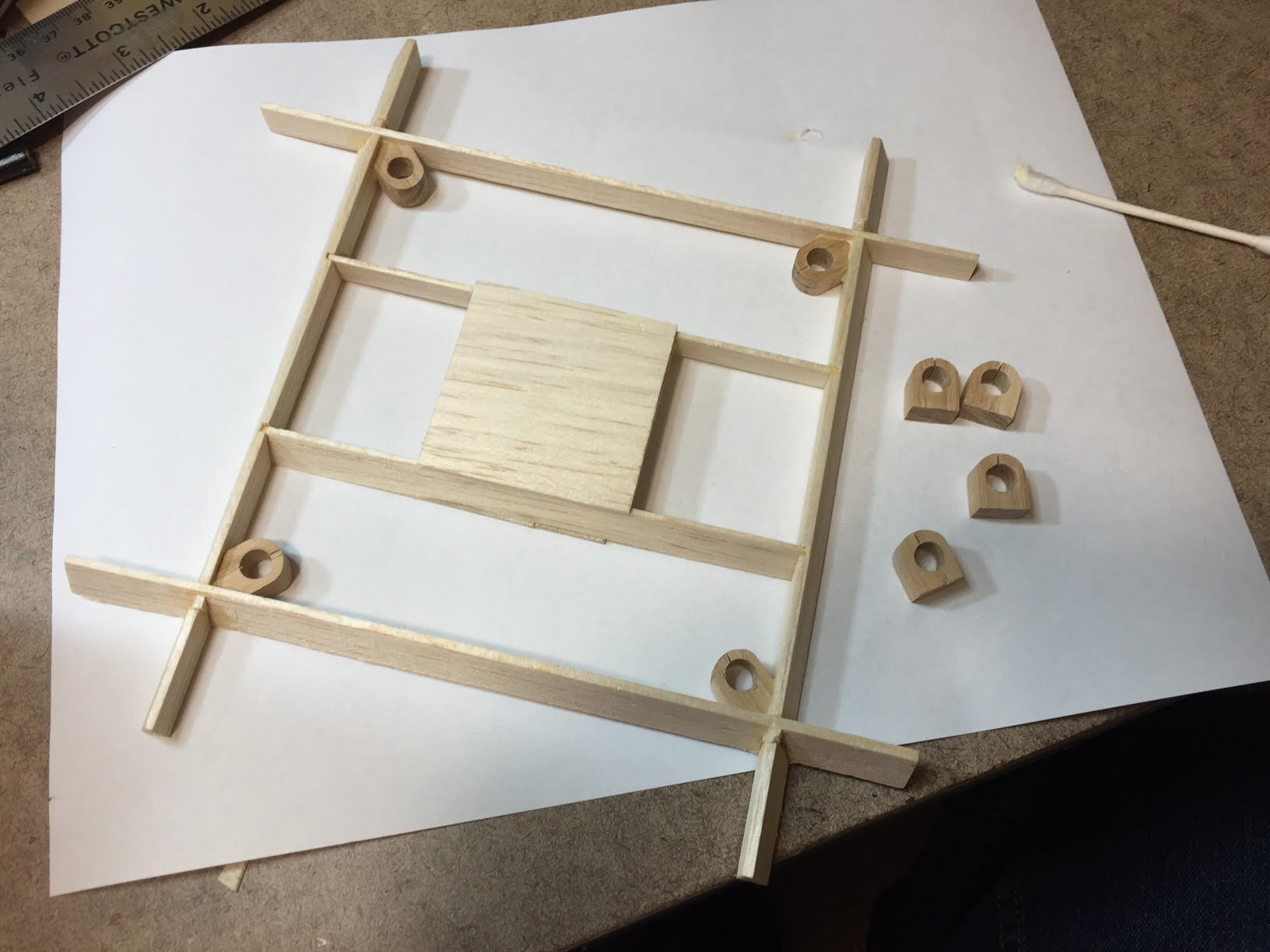
- Quadcopter frame is completely made of PCB - the entire quadcopter fits on a 10x10cm board from DirtyPCBs, including one spare arm in case something breaks
- Radio control is a serial connection with FTDI pinout. Included on the board are breakouts for HC-05 / HC-06 / BTLE4 bluetooth modules, and XBee.
- Programmed over USB via a dongle to keep weight down (no point in flying with the USB header)
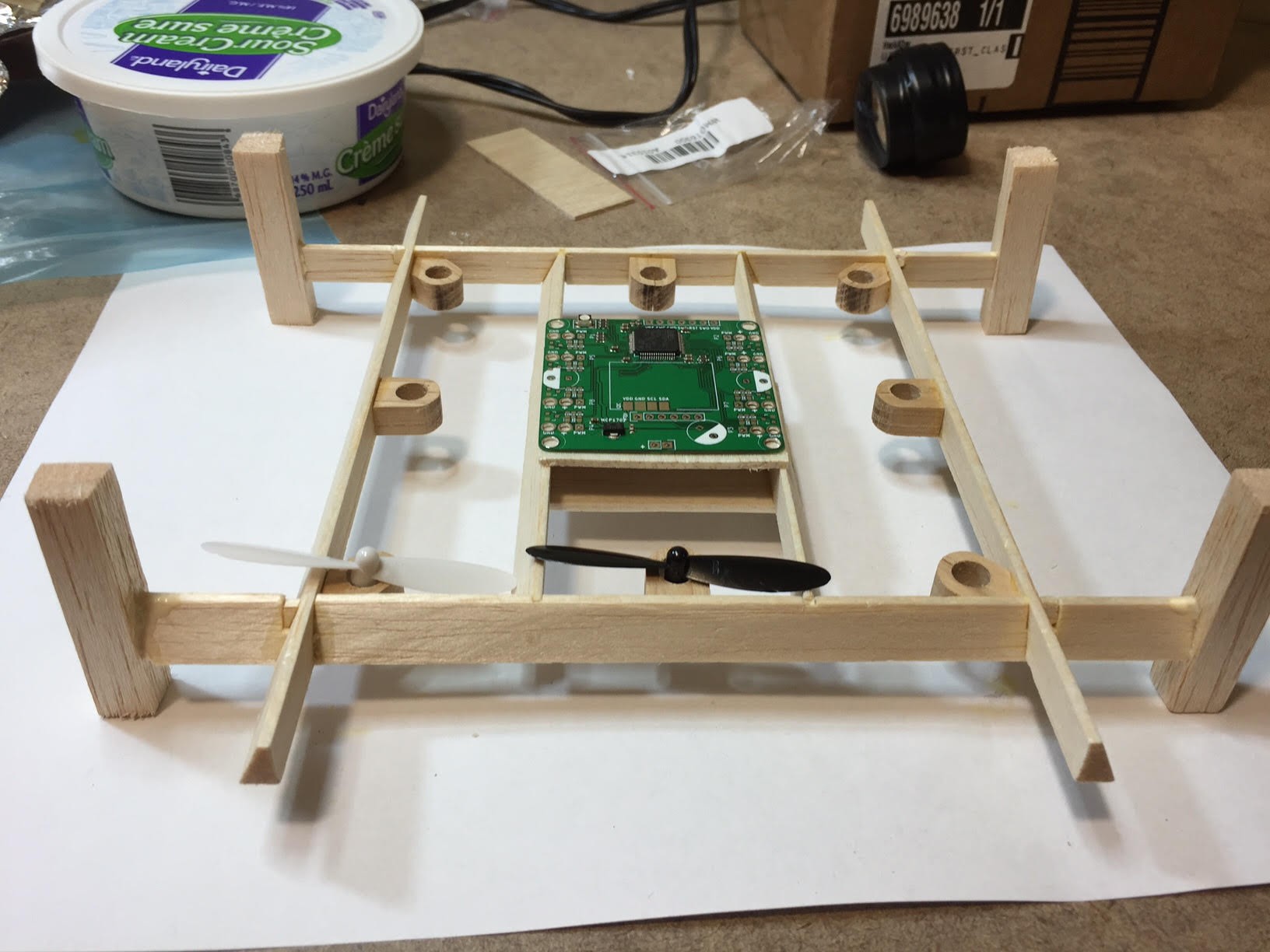
- Motors are the cheap 20x8mm coreless motors which can be found on eBay for next to nothing as replacements for commercial quadcopter toys.
- Entire cost of the project should be around $50










 nerd.king
nerd.king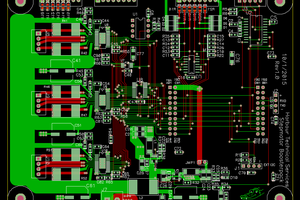
 Bharbour
Bharbour
 Timo Birnschein
Timo Birnschein
 Michael Rangen
Michael Rangen
it won't let me reply back, so i needed to make a new post. thanks, but one more thing- how did you get the attiny on the pcb? with a hot air gun?