 Douglas Miller
Douglas MillerSo far, it's going well. I started with the work on the Sphero Landstrider here: http://www.thingiverse.com/thing:428931 I'm changing a lot, but most of it is small changes here and there. The basic layout is the same as his, only I'm getting rid of the Sphero and adding two DC motors. that is a real good project, and I have to give credit where credit is due. Well done, man! And thanks for the look at it.
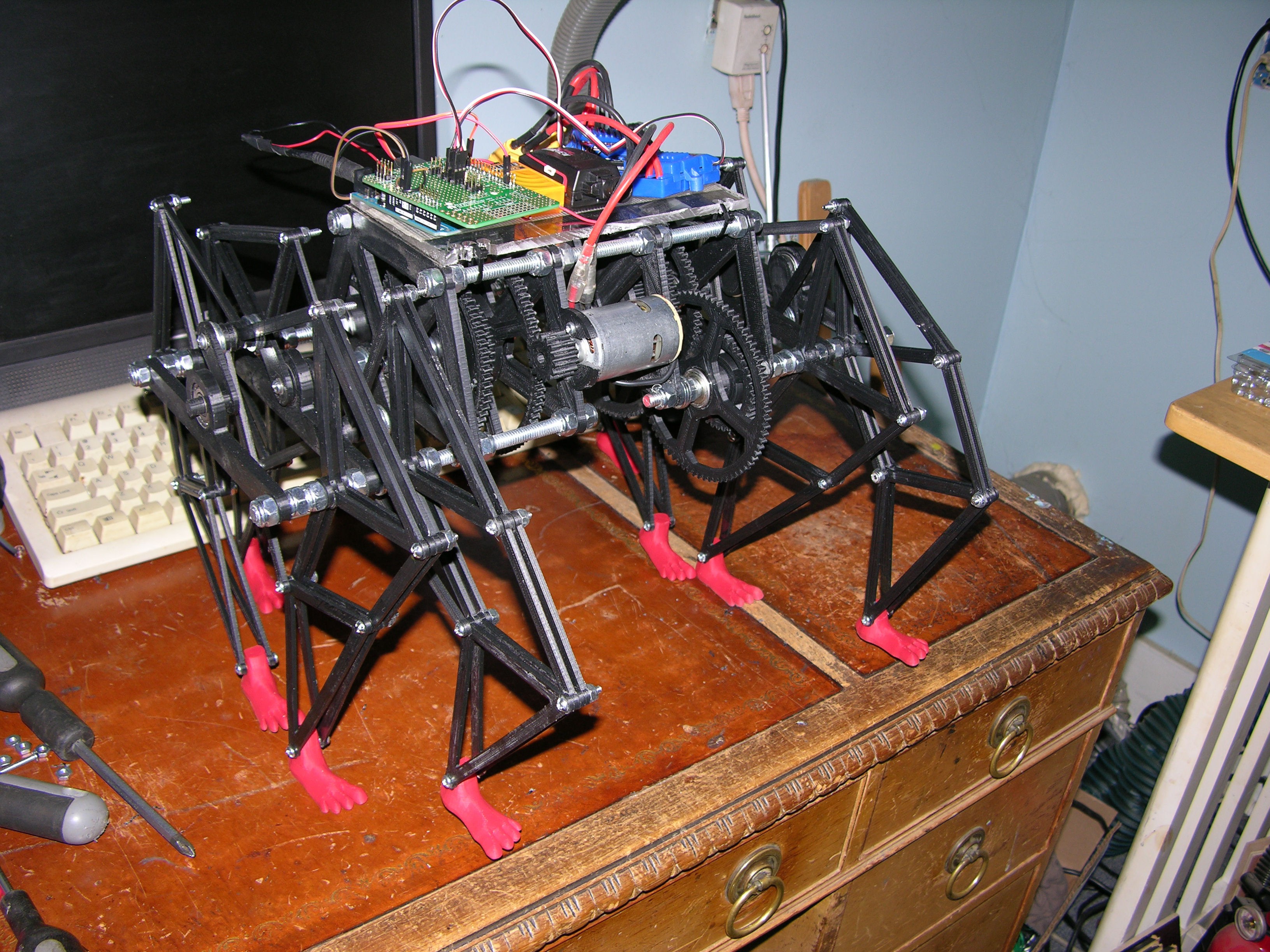
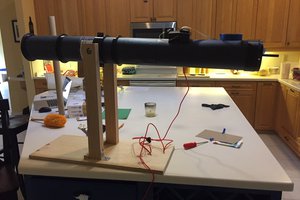
As you can see from the photo I have one side pretty much done. Pieces and parts crapping up my work space, but that's normal for me. I have had that side together and got to try it out, and it works fine. The only reason I took it back apart is because one of the gears curled up at the edges a bit on the 3D printer, so I'm printing another one.






 Nathan Brown
Nathan Brown
 Kenneth Zaborny
Kenneth Zaborny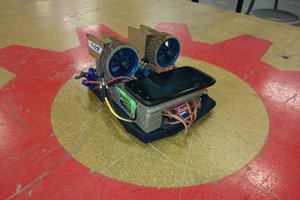

 RX HMP
RX HMP
I just ran the figures for the speed of this thing with the motors I have now. I had thought I'd seen the specs for this motor was 7,200 rpm. I just found the Chinese manufacturers web site and it shows them at 7,550. With the gear ratios as they currently are, and a stride length of 10", it comes out at about 3.3 MPH. A bit faster than most people like to walk. Call it a fast walk, and it can cross a room faster than you can. Yeah, needs slowed down. I'd be happy with a third of that speed at full throttle. One of the problems is with all the joints on all those legs there is a certain amount of torque needed to get it moving, and once it is you're already at half throttle or more, and then it really takes off. It's exciting to watch it get started, I'll give it that. But those walls sure come up fast! :P