The prototype V1.0 shows that the proof of concept works.
A single servo was used to lock the wheel axle.
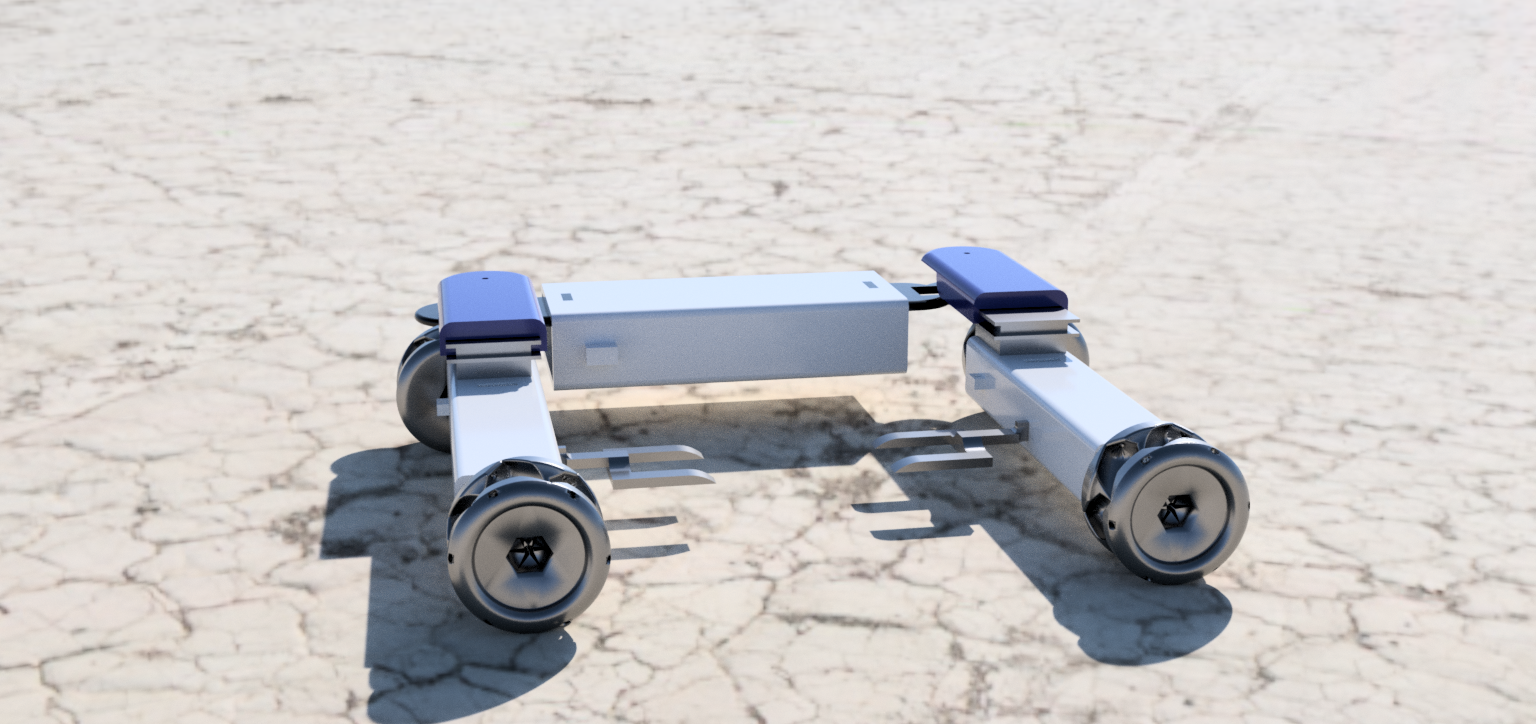
CAD design of the Robot
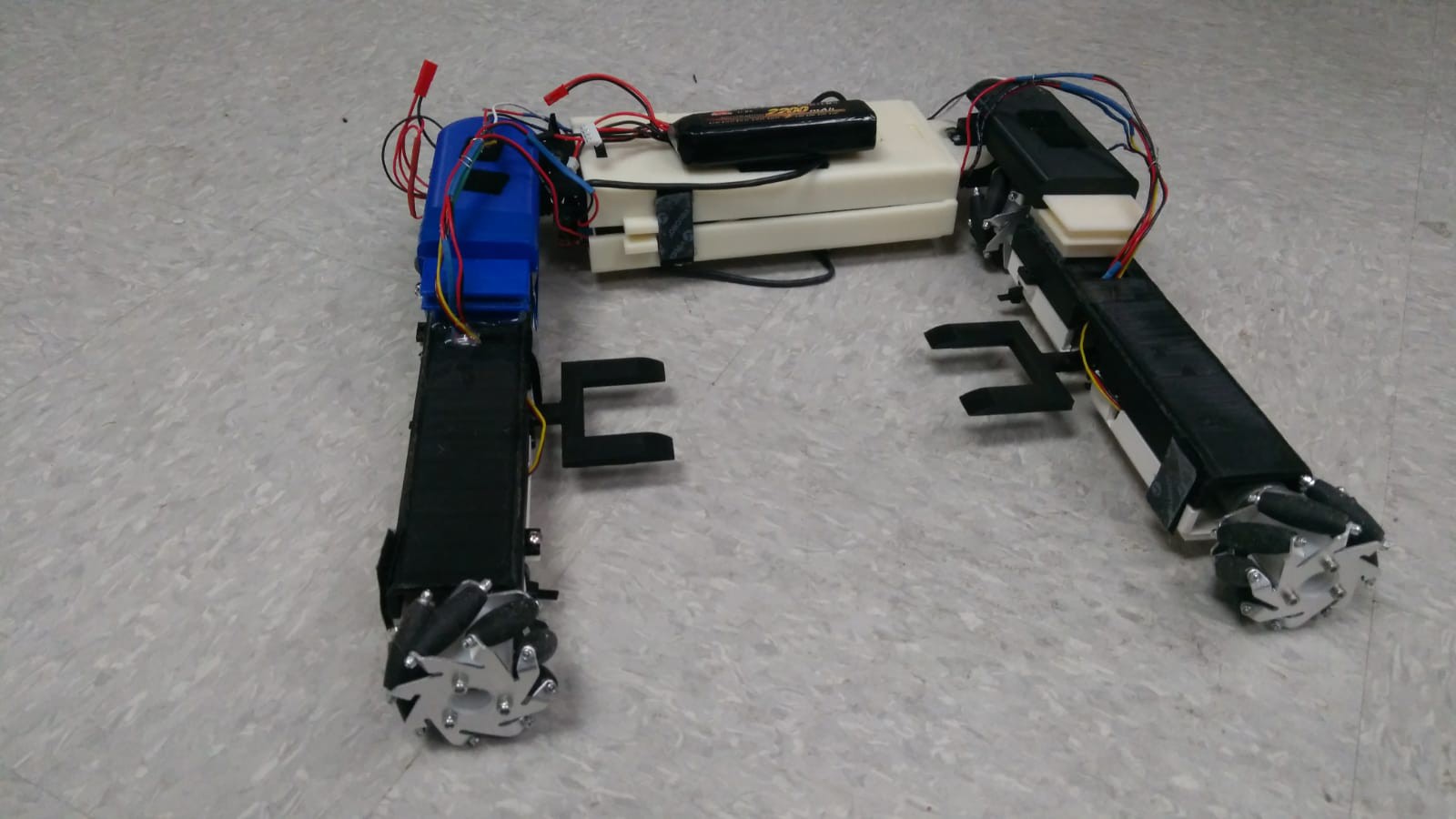
Version2.0 has 2 servos on the joint and 2 servos for lifting the object.
CAD design of the robotic snake.
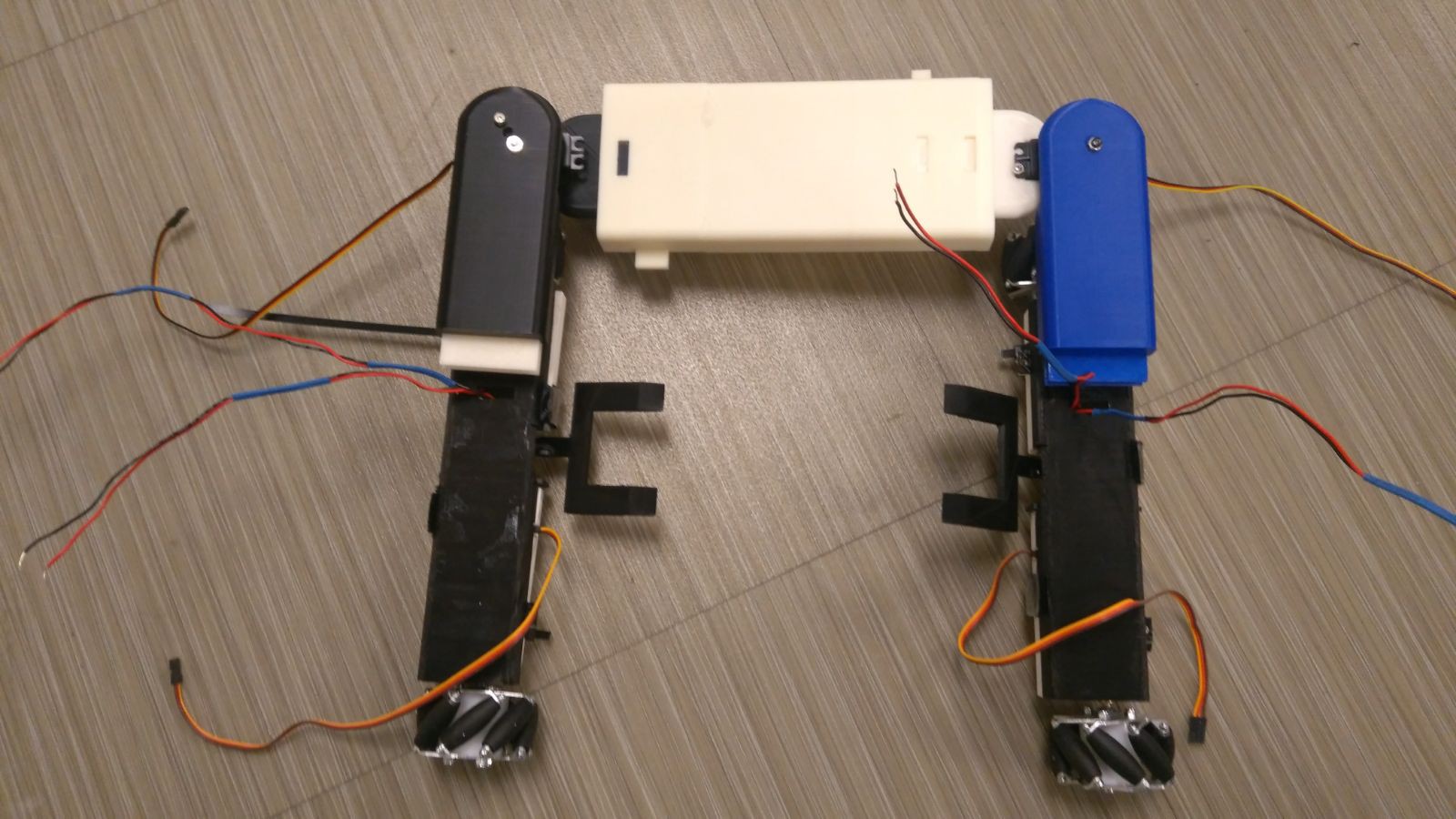
The Assembled Robot in car mode.
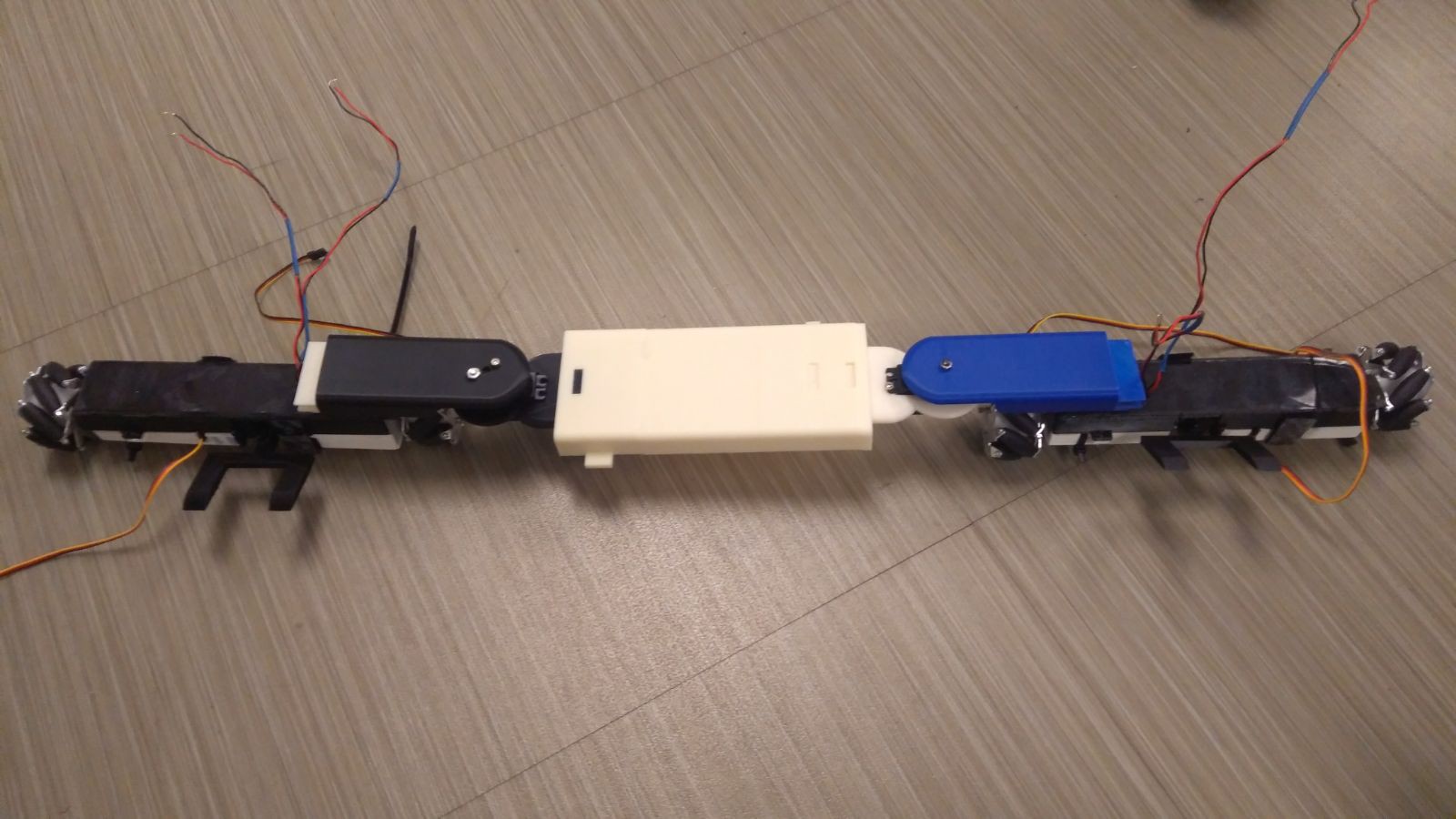
Robot in snake mode.






 Nguyễn Phương Duy
Nguyễn Phương Duy
 Will Donaldson
Will Donaldson
 Aaed Musa
Aaed Musa
this project is good design..can u please let me know about the specifications of the components used