Dan Royer
Dan Royer-
Ok, I think I might need your help
07/04/2014 at 21:50 • 3 commentsSome people have trouble with public speaking, some with spiders. I have trouble with asking for help.
Where I'm at
It seems I've reached a plateau. I don't seem to be smart enough to get over the stuff I'm stuck on, yet. To avoid the issues I've been blogging a lot to teach programming and robotics. The high-school level stuff I'm good at. I just wrote some stuff about making a line following robot and released the plans on thingiverse.
I'm also getting ready for NYMF. Heck, tonight I'm at MakerLabs in beautiful Vancouver, drawing a huge mural for their official opening party. Seems that now most of my day-to-day operations are smooth flowing, so I finally have time for outreach and generally giving back to the world.
See this? I'm trying to avoid the issue. Even thinking about it is hard.
Gearbox
If you've been reading the updates, you know that I've been trying to make a hypocycloid gearbox. So far I've got one that works but only sort of. It gets stuck a lot and the output isn't consistently even. I'd really like to make it out of another material. That very quickly reaches the corner of stuff-i-know-little-about and experiences-i-mostly-regret. So I'm looking for some help, maybe a confidence boost, I dunno.
Software
The software is working fine in three axies. I've even updated the instructions to make it easier for you to download, setup, and compile the java yourself. There are some big challenges here.
1. how to turn the finger tip with inverse kinematics? I was going to rotate it around the world XYZ axies, but some people might want something else.
2. What happens when switching from forward to inverse kinematics? Rotating the tip with FK or IK only is fine. Switching from one to the other after rotating the tip.... I don't know how to do that math yet.
3. What do I do about singularities? A singularity happens when there's more than one solution. For example, if the finger tip were point straight up AND directly above the shoulder? Well, the elbow could be anywhere and the results would be the same. So where should the IK put the elbow?
So
I'm going to keep working on this. Eventually I'll figure it out. I'd rather learn how others solved similar problems, it's a more efficient solution.
If you have ideas, time, or resources that might help, I would really appreciate it.
-
Hypocycloid success?
06/22/2014 at 20:57 • 0 comments![]()
Video of the my first hypocycloid gearbox in action:
http://instagram.com/p/piMRPxofLx/
The print tolerances were very challenging to get right.
http://www.thingiverse.com/thing:371422
Here is the file if you'd like to print your own. I'd love to hear your ideas about how to improve performance.
-
Hypocycloid gearbox model
06/12/2014 at 15:01 • 0 commentsHere's a quick video showing my first attempt at a gearbox: http://instagram.com/p/pIUrC2IfEN/
Bearings will have to be added in a couple places to keep things moving smoothly. Good thing I have practice!
-
A little story about gearboxes
06/11/2014 at 20:31 • 0 commentsI love sub-projects. Some people start a lot of projects totally divorced from each other. I like projects that are building towards a greater goal. They have added purpose, makes them feel more important, I guess.
For example, I really enjoyed making the bearings that turned out to work really well. Seems other people did, too. Now I'm wondering if there's opportunity there for my first kickstarter - money would be used to make an injection mold for higher quality mass production and contributors would get bearings at a discount for their projects.
As the arm is coming together I can see that I'm going to need a gearbox to get enough power from my stepper motors to lift at the shoulder. I've been in love with the idea of hypocycloidal gears for a long-ass time now.
I'm filming Matthew (a Solidworks master) back in 2012. I was originally inspired by this other guy:
Who's website I found here: http://www.zincland.com/hypocycloid/
This morning I decided to download zincland's python scripts and see if I could generate some of these profiles. Save File > My Documents > Design - oh, there's already a folder for gearboxes? Hey! There's a folder for hypocycloids, too...and the files I'm trying to save are already here! But then what's this HTML file?
![]()
Turns out in Two thousand and eleven I had started creating a Javascript version of the DXF generator and then completely forgotten it.
So here it is for you: https://www.marginallyclever.com/other/hypocycloid-generator.html
No need to install or run anything. Just change your parameters and then save the DXF file contents (in the textarea) to a file of your choice.
If that's helpful to you, let me know and share with your friends.
-
Wrist to Base!
06/06/2014 at 19:34 • 1 commenthttp://instagram.com/p/o6fQlBofL3/
![]()
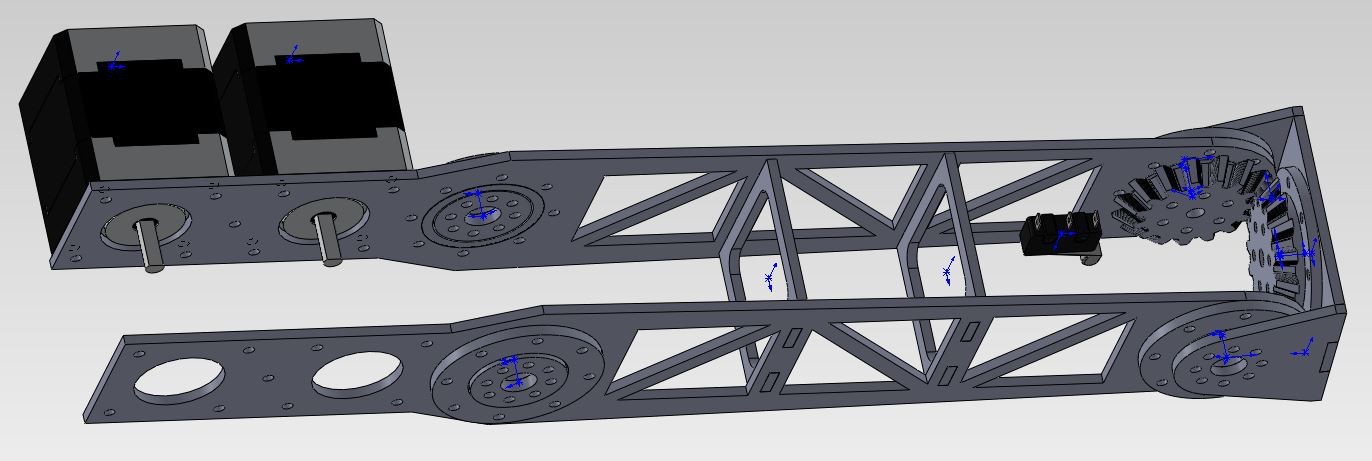
Just in time for the Vancouver Mini Maker Faire I've assembled all the linkages between the base and the wrist. Everything moves smoothly and the three motors on the top should be able to drive the wrist and elbow. I have the electronics already to drive the rest. I don't have time before the show to add the motors and gearing to make it all go.
I've only had to change the forearm once, to add mounts for the limit switches at the wrist. They serve double duty - making sure the wrist can't turn to far in either direction AND making sure the wrist doesn't hit the shoulder. It's a little hard to see the switch on the back of the shoulder in this photo. when the arm is powered off it rests on the ribs across the shoulder and the elbow motor touches the switch.
Waving this thing around I can see already that the bicep is going to need some ribs to reduce torsion. Also the whole thing is very top heavy. The base will be ~20cm tall. Inside I'll hide the electronics and the power supply, so you'll only have to plug in and go.
I'd love to see someone design an automatic tool changer. Right now my only option is to bolt a tool onto the four screws at the wrist.
A rough measurement says base center to wrist face at full extension is ~53cm. might even go as far as 55. Getting enough power at the shoulder to lift the arm - let alone the 1kg target mass - is going to require some serious gearing. I feel confident that I've got bearing prototypes down now, so that shoulder bearing into a gearbox with something like 200:1 reduction is called for. Hypocycloids, to the rescue! If I can build it parametrically I might use them in the shoulder and base, too.
In the coming weeks I have a bunch of new products to list on my online robot store and manufacturing is taking up a lot of my time. Whenever I get a break I like to relax by playing my game. Maybe you've heard of it? It's called "robot arm". I like a game that doesn't have cheat codes or walkthroughs.
If you're enjoying this project, please pimp it to your friends. Let's see if we can get this thing featured, OK?
-
Does this actually qualify?
06/05/2014 at 05:36 • 1 commentthe hackaday prize demands that the project uses some kind of network connectivity. For me, democratizing manufacturing does more to connect people than the Internet of things. Information overload does not compare with tangible increase in productivity.
Ok, possible rant over. Today I modeled the shoulder and the base. I probably won't get time to make them until next week as ill be at the Vancouver mini maker faire Saturday and Sunday. Apparently some people are flying in to town just to see the progress on the prototype. I don't know how I feel about that.
-
Wrist, forearm, elbow, bicep
06/03/2014 at 06:37 • 0 comments![]()
Read about it and see more pictures here:
https://www.marginallyclever.com/blog/2014/06/building-a-5dof-robot-arm-3/
-
Axies 4 & 5 update
06/01/2014 at 15:10 • 0 comments![]()
Read more about it here:
https://www.marginallyclever.com/blog/2014/05/building-a-5dof-robot-arm-2/
-
Axies 4 & 5
05/30/2014 at 05:34 • 0 comments -
Velocity ramping is a go
05/17/2014 at 06:23 • 0 commentsTL;WR: http://www.github.com/marginallyclever/arm3
I know the total steps and the maximum velocity I want to reach. I can find how many steps I should accelerate and how many I should decelerate. So I think I spent 2h writing the code to do exactly that and 2h tweaking the acceleration and top speed to minimize overshoot. How good is it? The overshoot is almost completely gone. I'm picking up a bit of vibration from the motors and I wonder now if gear backlash is becoming the dominant issue.
The GcodeSender app has been improved to create "your message here" gcode for the arm. I'm finding that lines are very straight, but the pen holder is now the weakest link - the grip on the pen is loose and the pen wobbles in the holder. I tried a rubber band to grip more tightly and that created a new set of problems.
Philisophical question: how do you know the difference between a problem and a symptom? Can't a problem be a symptom of a deeper, more subtle problem? I need a loose grip on the pen because the arm's distance from the table isn't perfect. I also notice that long horizontal lines on paper are bowed. Perhaps I'm getting the machine home position wrong. If it were perfect the arm would move in straight lines with constant Z (if desired). that would mean I could put a tighter grip and reduce the play in the system.
Since I'm at maker faire I think I'll wander over to the TechShop booth. They have a laser cutter. It shouldn't be any trouble for them to cut a better fitting pen holder as an experiment. Someone around here has got to have some glue.
You'd be surprised how hard it is to get makers to make something at a maker faire. Wierd, huh?
5+ Axis Robot Arm
Building an open source robot arm for makers and small businesses