 Valent Turkovic
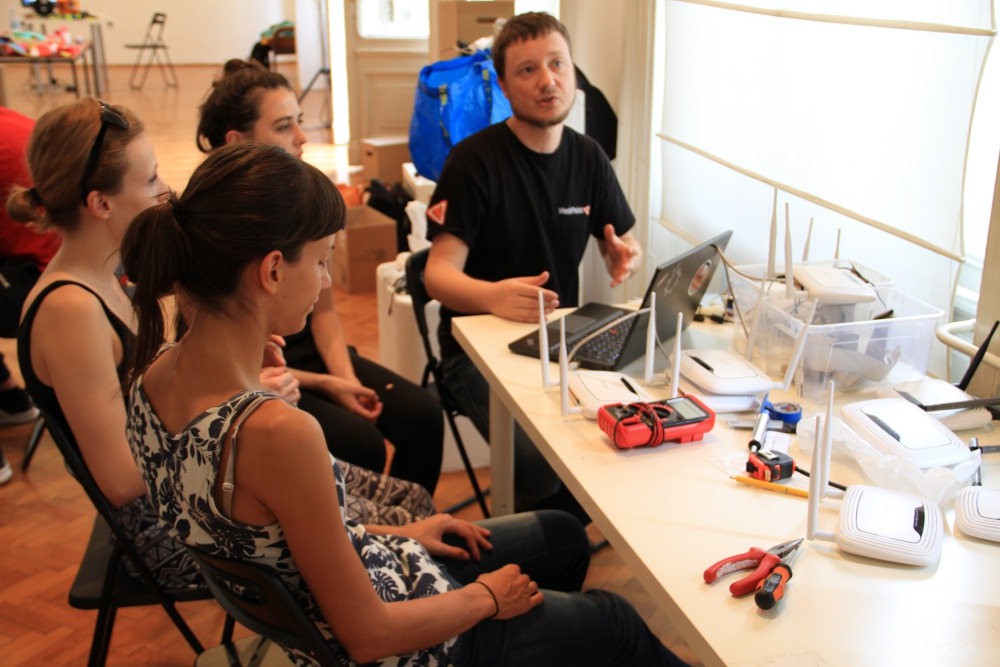
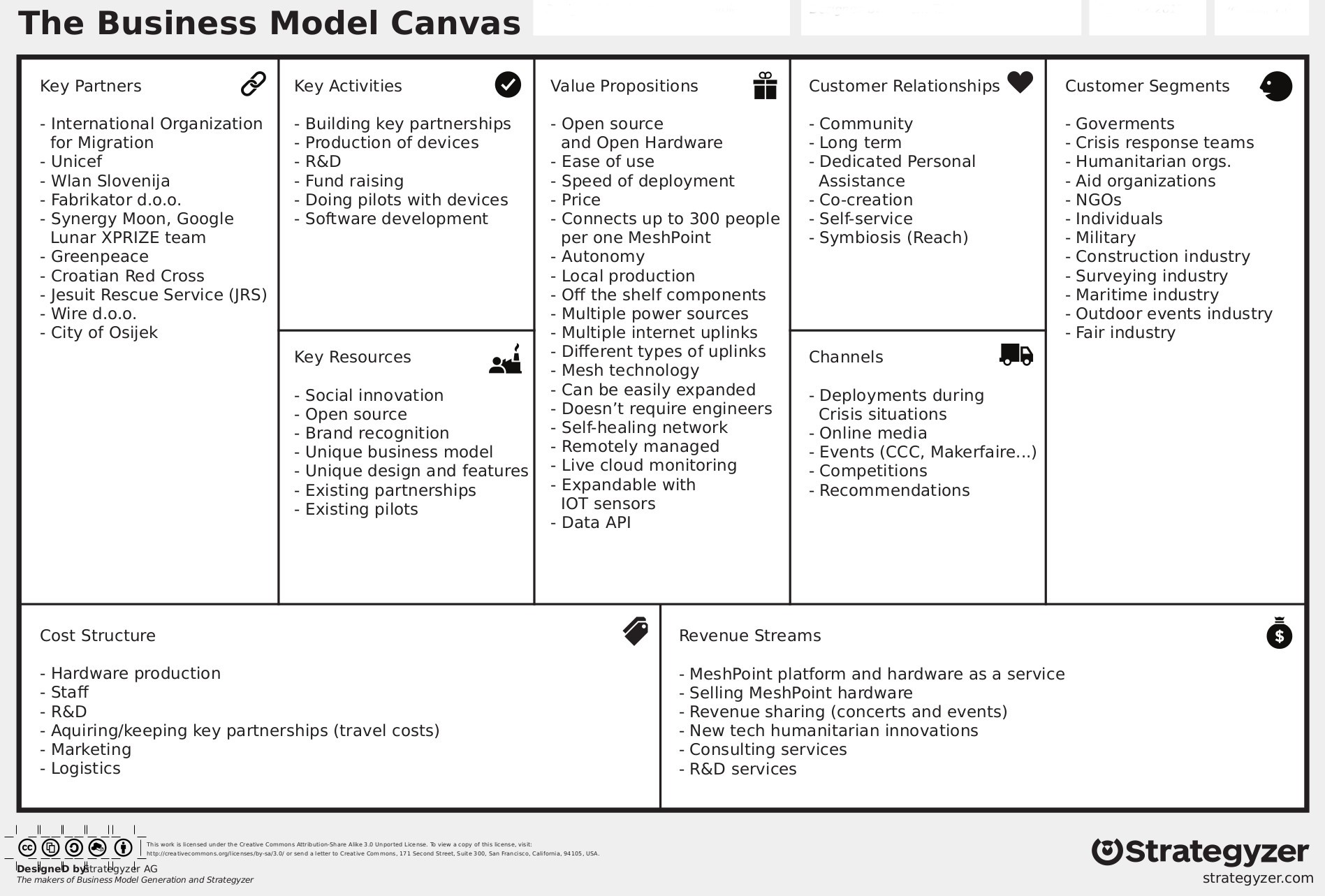
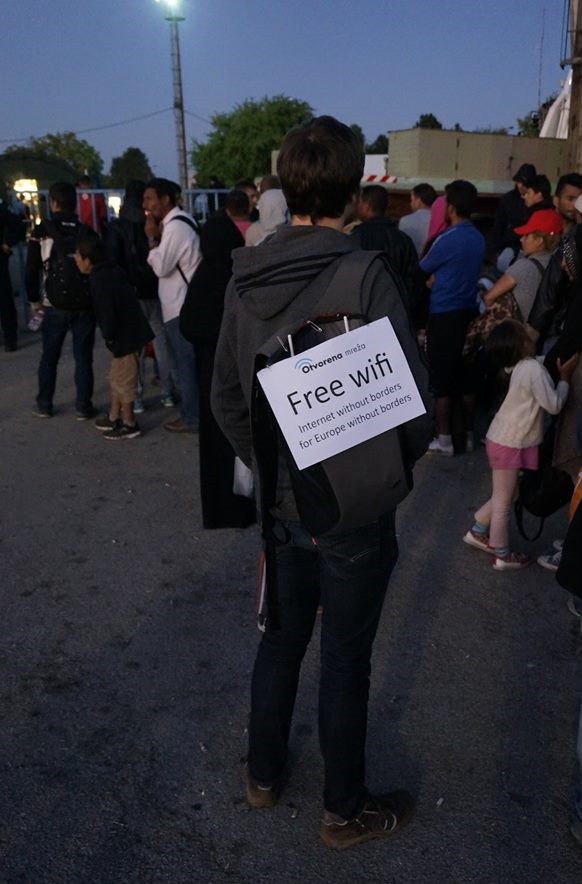
Valent TurkovicIdea for creating MeshPoint started when volunteers from project Open network (Otvorena mreža) in Croatia led by Valent Turkovic started helping humanitarian organisations and refugees during Syrian refugee crisis of 2015. They saw that need for communication was really great - humanitarian organisations needed communication for coordinating volunteers in the field, for logistics (having enough food and blankets in field warehouses, etc.). They also noticed that all the biggest NGOs like Greenpeace, Red Cross, International Organisation for Migration, Unicef and others struggled to setup communication with their teams in the field, and how all current networking products are not suited to be used in crisis events by first responders.
Open network volunteers setup mobile and fixed wifi hotspots and gave them to volunteers and humanitarian organisations that were working in the field. Really soon it was apparent that creating solution from off the shelf components was just too complicated for humanitarian volunteers to maintain.
That is how idea for building an really easy to use and autonomous wifi hotspots came about.
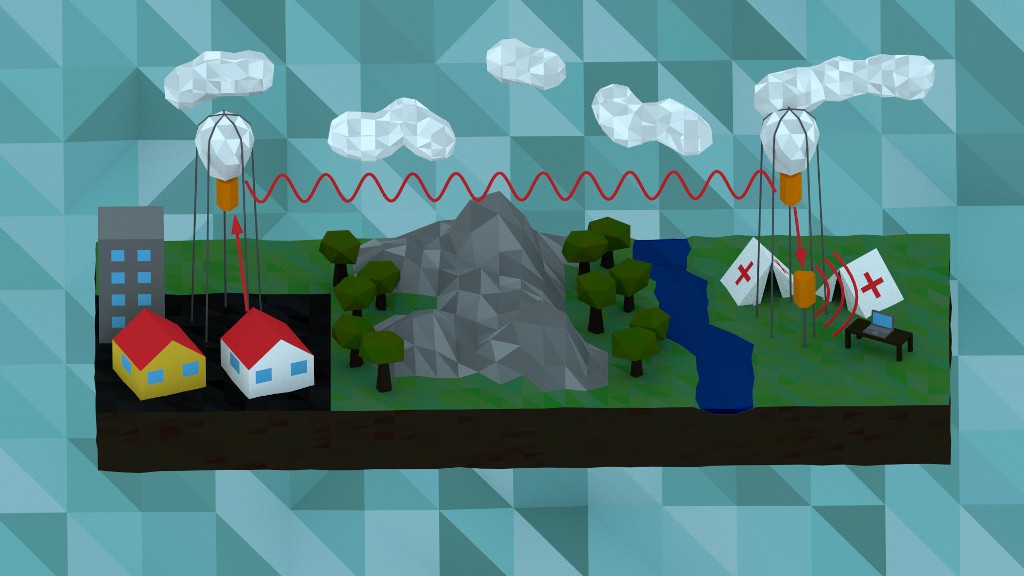
In order to setup communication in crisis situations like floods and earthquakes devices first and foremost have to be easy to use, especially by first responders, but they also need to:
- be able to provide connectivity to multiple thousands of people
- be scalable
- use mesh networking
- be battery and solar powered.
So what are the requirements?
- Open source hardware and open source software
- Setup needs to be easy, as easy as creating social networking profile
- Needs to work autonomously for at least 6-8 hours (via battery pack)
- Needs to be able to charge battery pack over any power source (solar, wind, AC generator, car battery...)
- Can form a mesh network so coverage is spread really fast
- Has capacity to server lots of people (multiple radios and frequencies)
You can find out more about the project at:







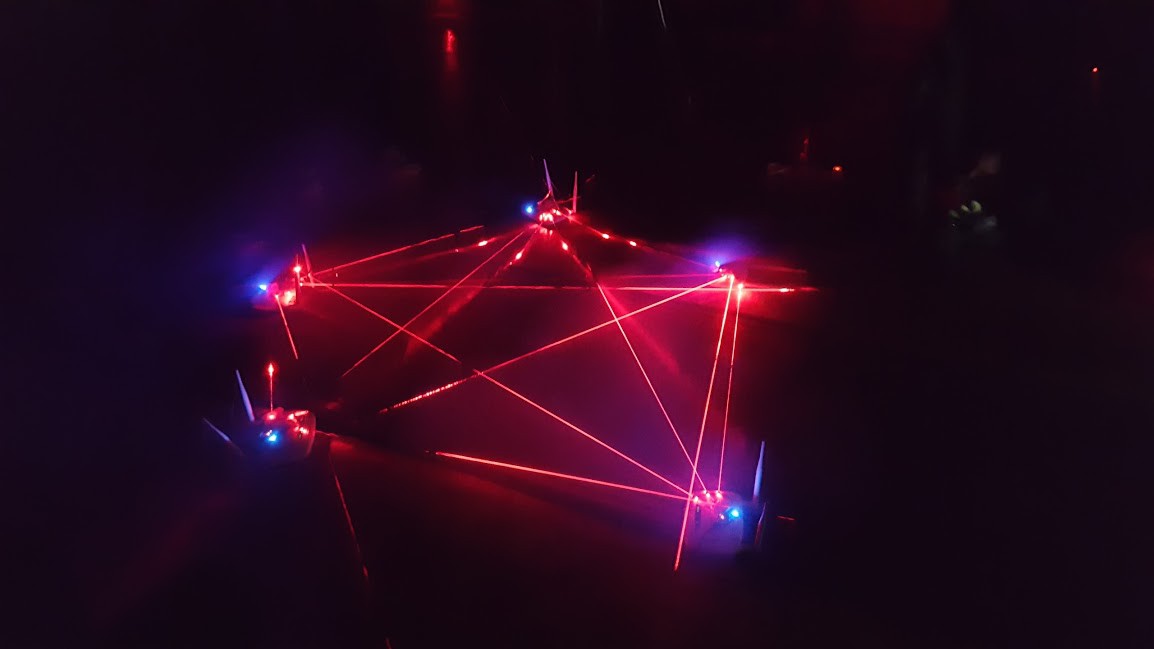
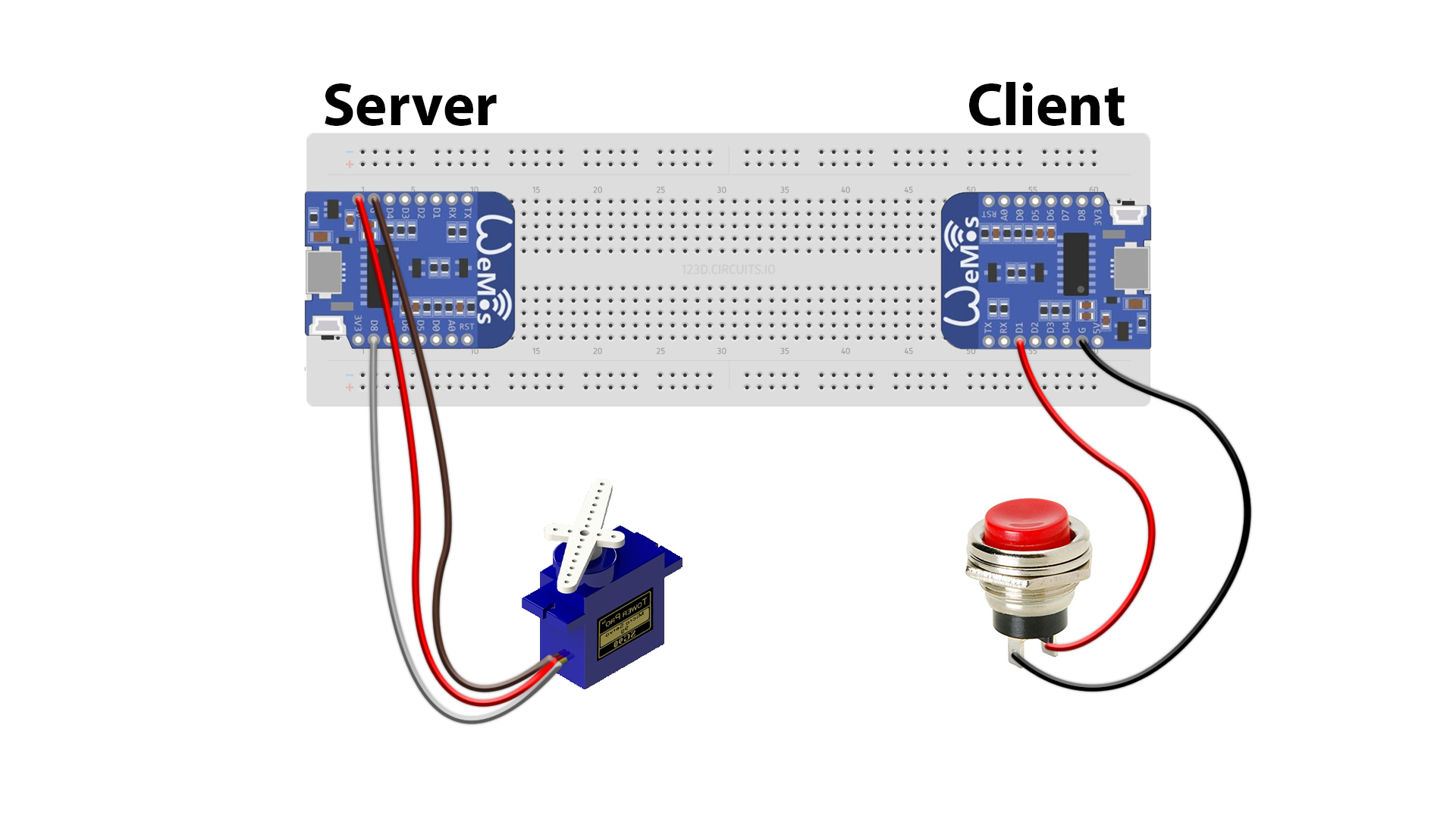
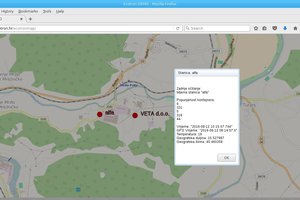
 At router we wrote small script that takes data from babel and sends serial message to arduino to start or stop lasers...
At router we wrote small script that takes data from babel and sends serial message to arduino to start or stop lasers... And finally mesh visualizing
And finally mesh visualizing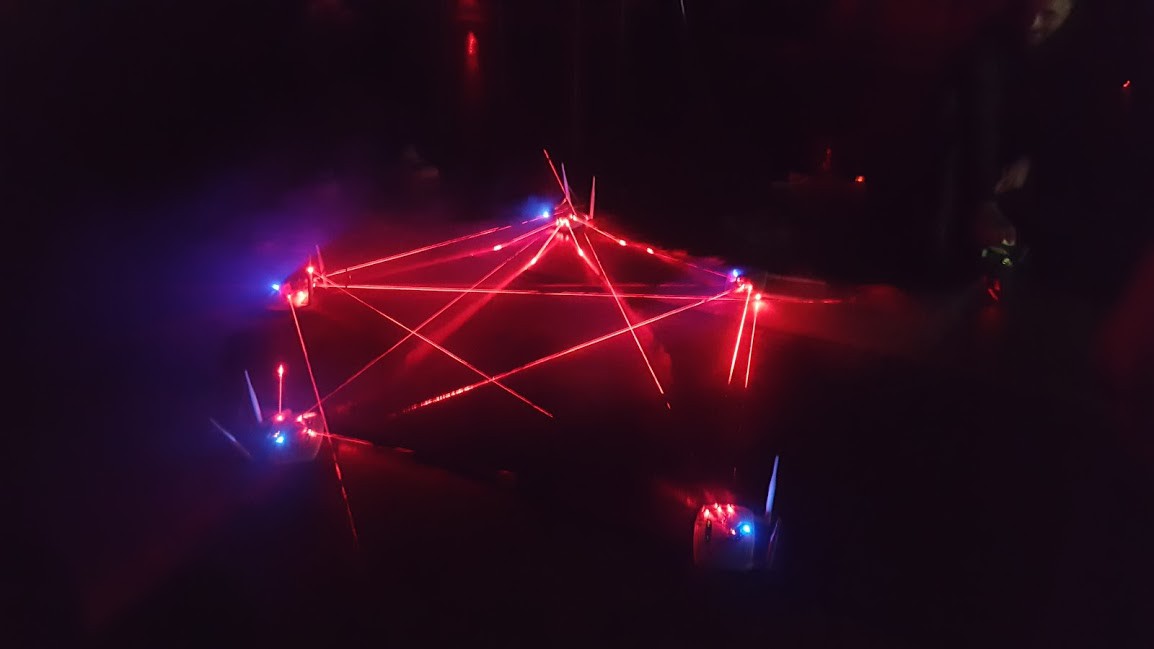






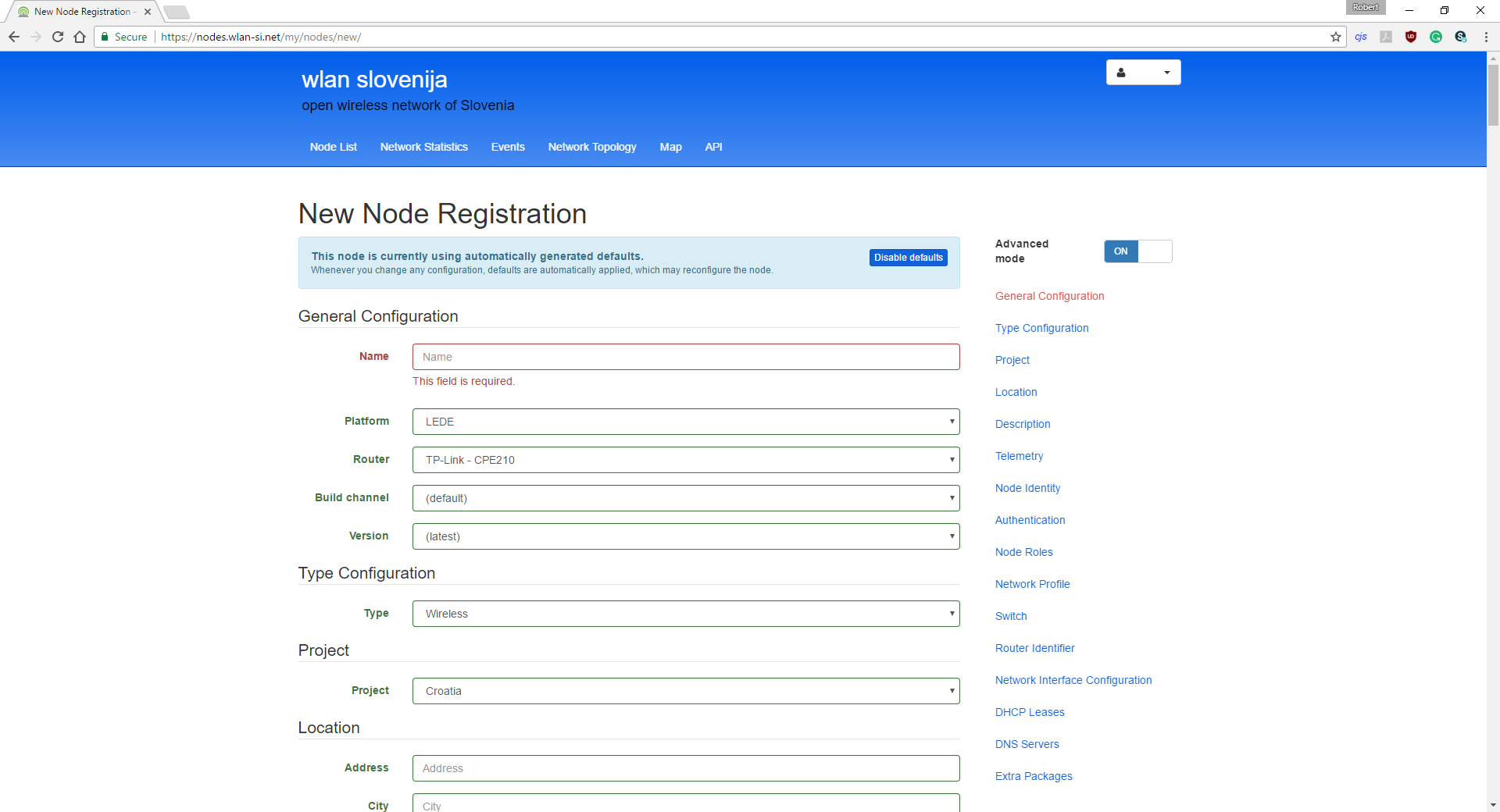
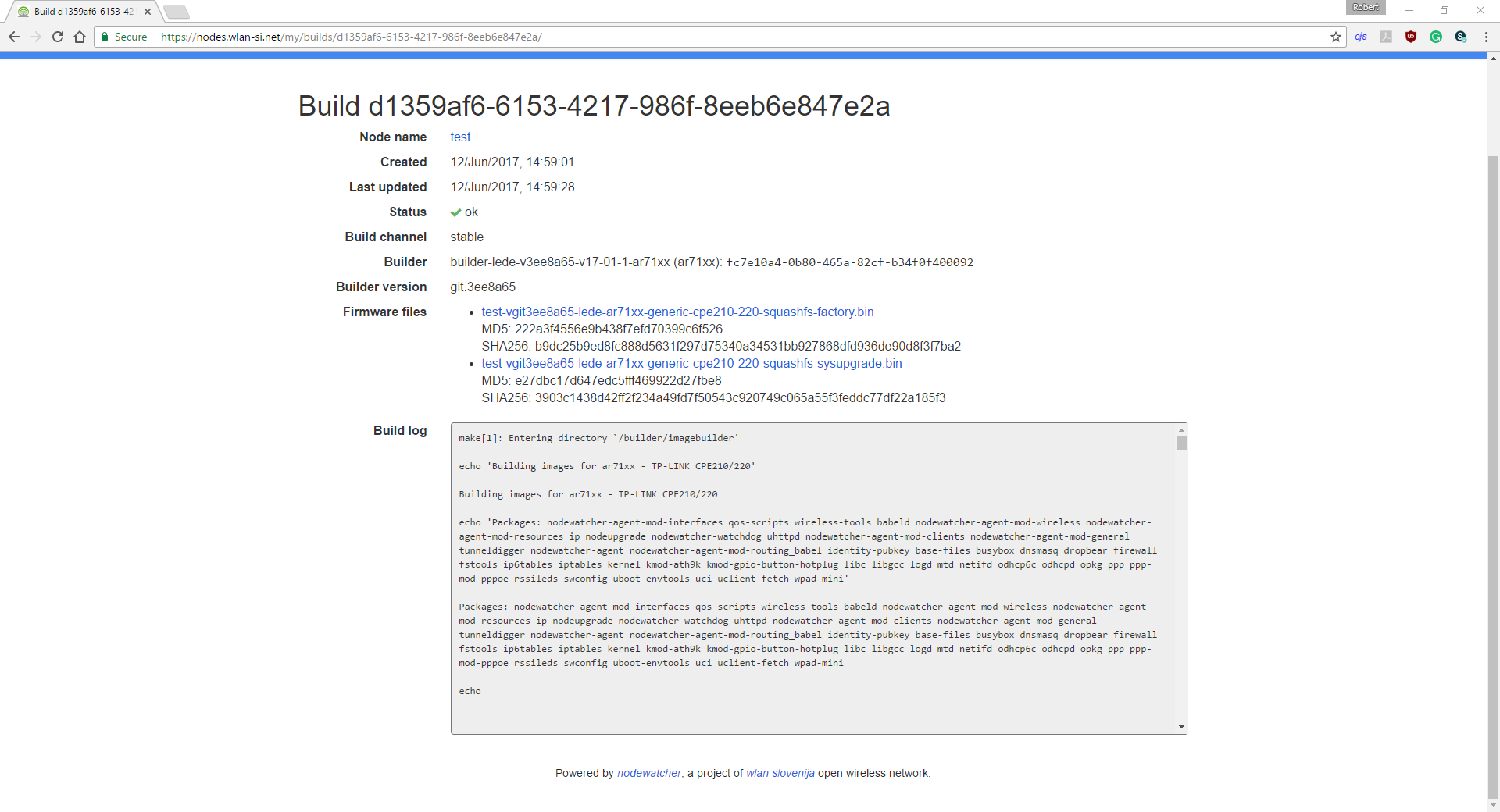
 Fill in required information and under Default project
Fill in required information and under Default project Now you will see form like one shown in the picture.
Now you will see form like one shown in the picture.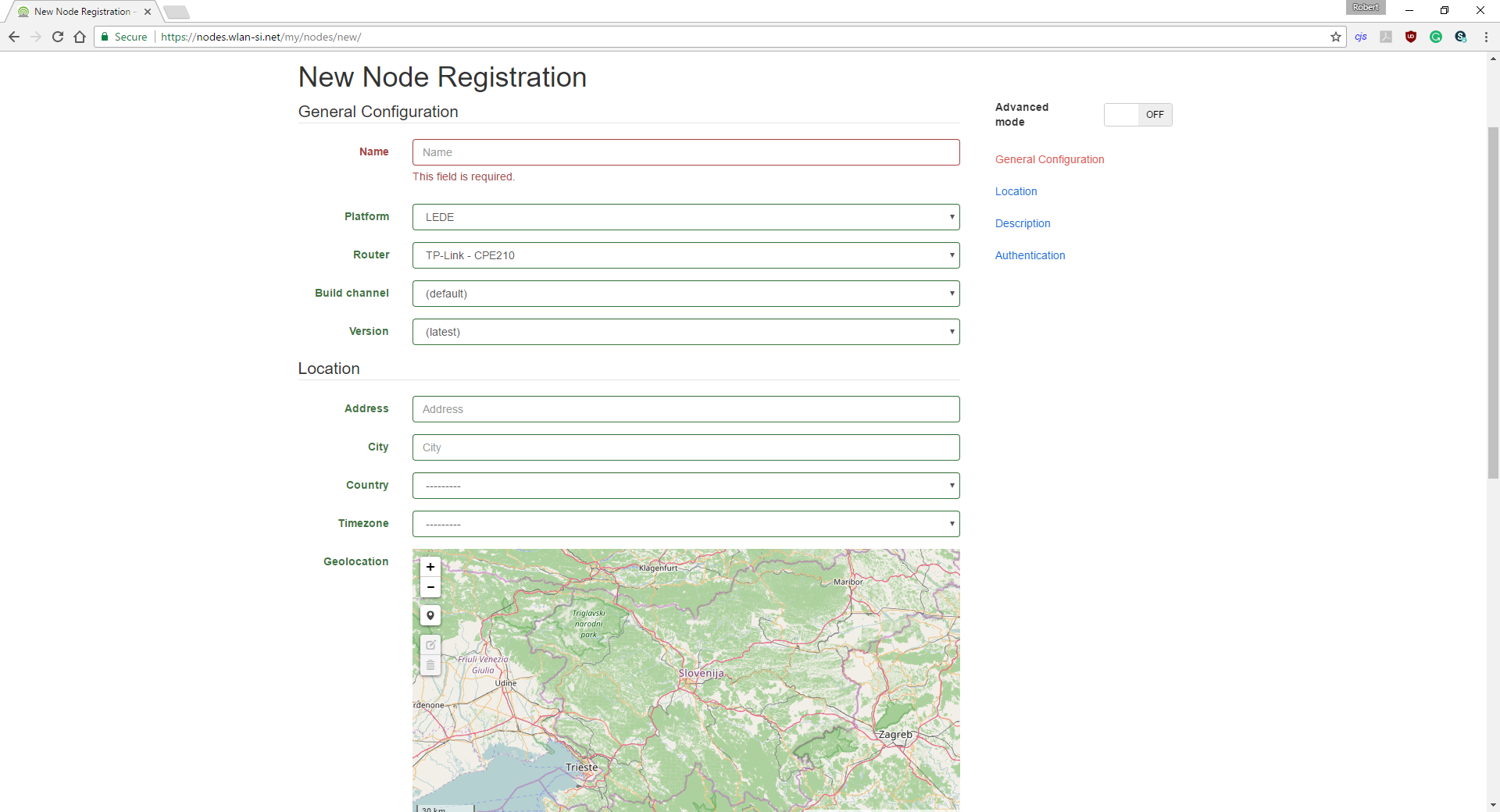
 Now scroll down to the part where you will see Wireless Radio.
Now scroll down to the part where you will see Wireless Radio.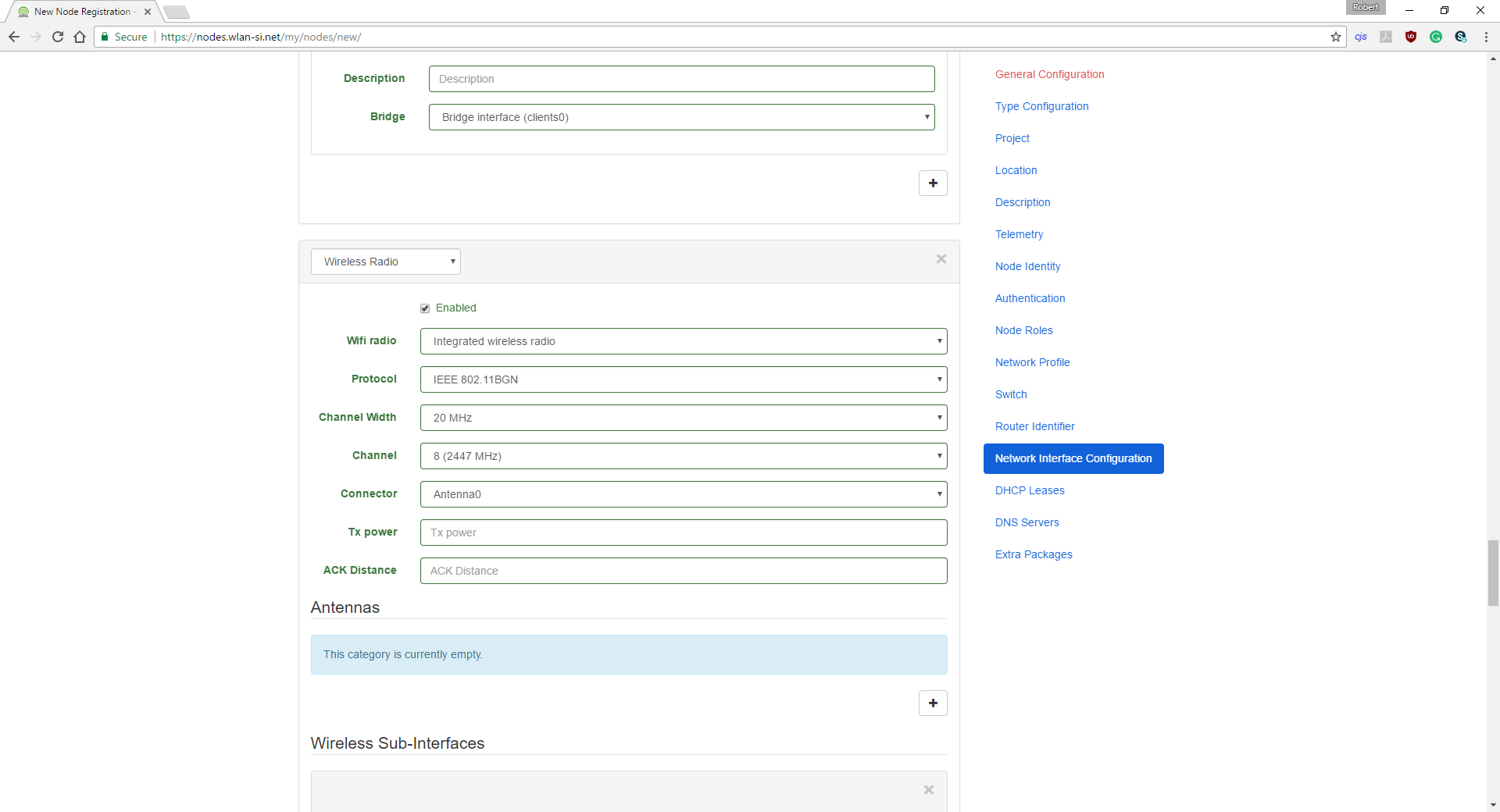




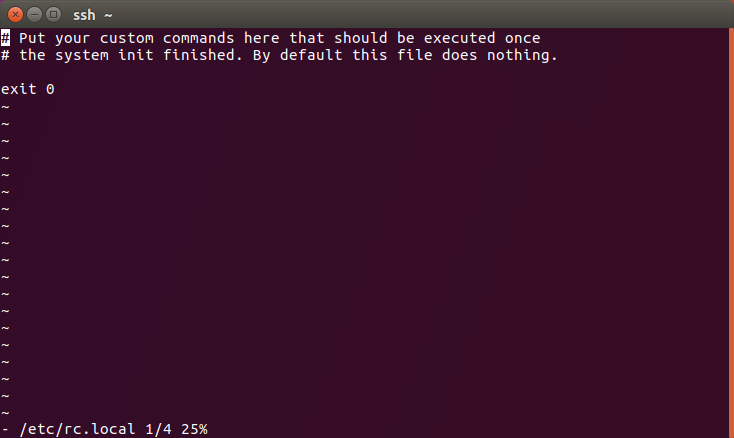 In order to edit the file in vi text editor you need to simultaneously press SHIFT+I keys.
In order to edit the file in vi text editor you need to simultaneously press SHIFT+I keys.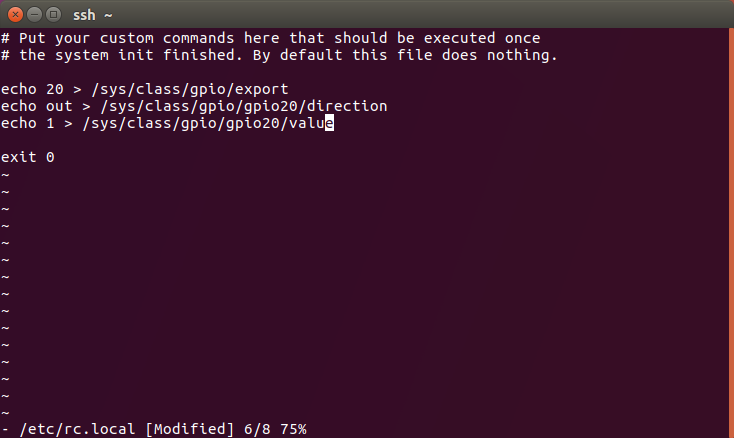

 mikrotron
mikrotron
 Rusty Jehangir
Rusty Jehangir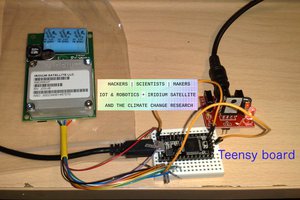
 Fabio Balzano
Fabio Balzano
 Amine Mehdi Mansouri
Amine Mehdi Mansouri
interesting but why this not a sonet or gotenna2 functionality?
lora is better than wifi