The goal of my Mind-Controlled Robot project is to design a robot which can be controlled using brain waves. As a next step to this project, I want to design a wheelchair and prosthetic arms & legs which can be controlled using brain waves. This will help paralyzed people be more self-reliant. There are over 5 million paralyzed people in US. I developed the final prototype using the Mindwave headset and the Arduino microcontroller. I used a technique called EEG (electroencephalogram) to read the brain activity. I used the attention value read by the EEG headset to control the robot.
Currently, paralyzed people rely heavily on others. However, with electroencephalography, this can all change. Using this technology, paralyzed people can control technology just as well as a non-paralyzed person does.
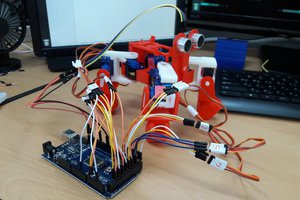
The Mind-Controlled Robot prototype was constructed using an Arduino microcontroller, the Mindwave NeuroSky RF dongle, and a chassis. The NeuroSky RF dongle was programmed to communicate with the Arduino. In the program the attention value was set to the motor speed, which made it move faster when the concentration was at a higher value. The goal was then to make the robot turn if the attention value from the Mindwave was less than a threshold. This would help the user move more effectively. The product was tested with different age groups. During the test, the test subject got into a focused state of mind, and the data range from the serial monitor was taken for the focused group of data. Then, the test subject would be unfocused for a period of time and the data range from the serial monitor was taken. Readings were taken in the manner stated for 3 test subjects for each age group, and the results were graphed. The threshold was found to be 40 percent. The results were consistent throughout all age groups. The robot performed as programmed, and functioned well throughout all of the tests.



 Cassiano Campes
Cassiano Campes
 Jithin Sanal
Jithin Sanal
 Arno Munukka
Arno Munukka
I followed your mindwave project but it does not work. The RF dongle and the hedsets have no response. I used Elegoo Smart Robot Car Kit V3.0, and the RF dongle is also provided by the skits. I am not sure if I need to buy a mindwave RF dongle