-
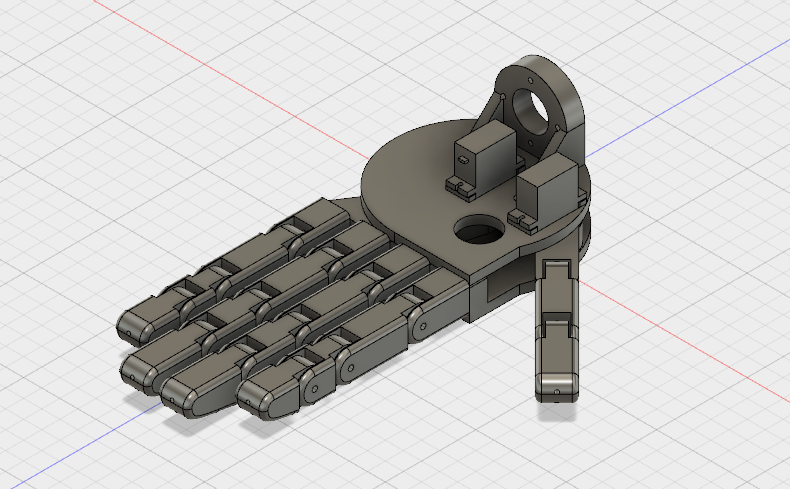
Mounting bracket and routing holes
04/22/2018 at 23:43 • 0 commentsThe modifications necessary to mount the gripper to an existing robotics project has been made. It can be mounted using 4 M3 screws. The servos that are attached to the fingers with bowden cables need to be mounted to the existing project according to the design of the project. For example, for a humanoid search and resque robot, the sensible placement would be the elbow in order to shorten the bowden cable length, making them more efficient. Also cable routing holes have been added to the design in order to make the connection of the bowden cables easier.
The design of the first prototype of Robotic Hand With Interchangable Gripper Types (RHIG) is finished with these modifications. As mentioned before, i won't be able to physically produce the prototype. All the files will be available, also as mentioned before.
![]()
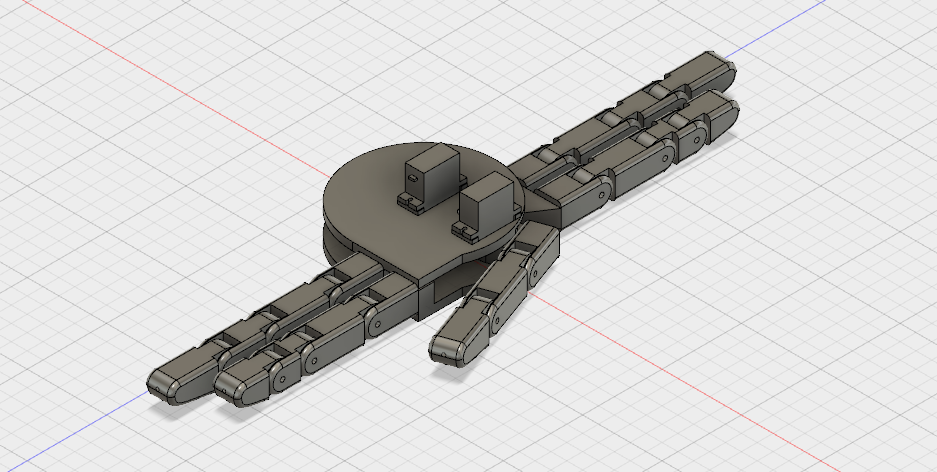
Final design of the Robotic Hand With Interchangable Gripper Types (RHIG) with the mounting bracket and routing holes
-
Improved thumb design
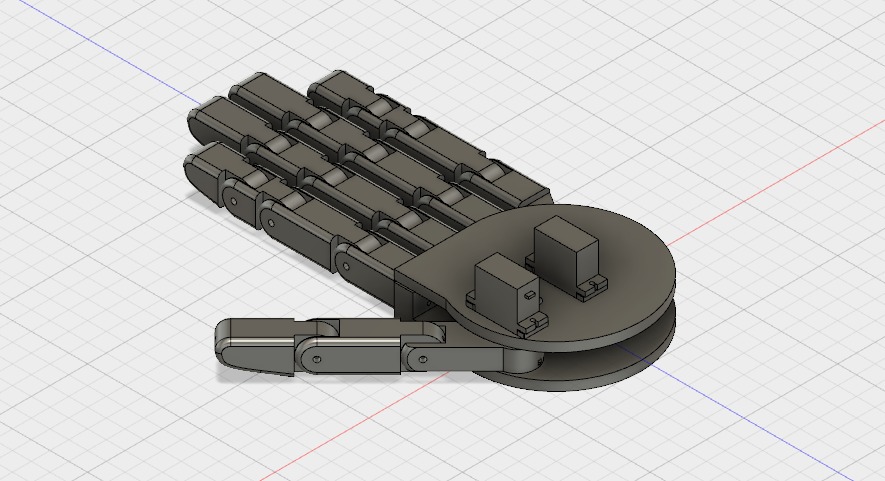
04/17/2018 at 23:29 • 0 commentsThe thumb swivel point has been altered in order to increase the degrees of rotation of the thumb. With this alteration, a new and necessary axis of rotation is added to the overall gripper that enables the gripper to do more intricate actions such as pinching.
![]()
The second version with more linear thumb swivel point, extending the range of motion and the gripper's abilities
![]()
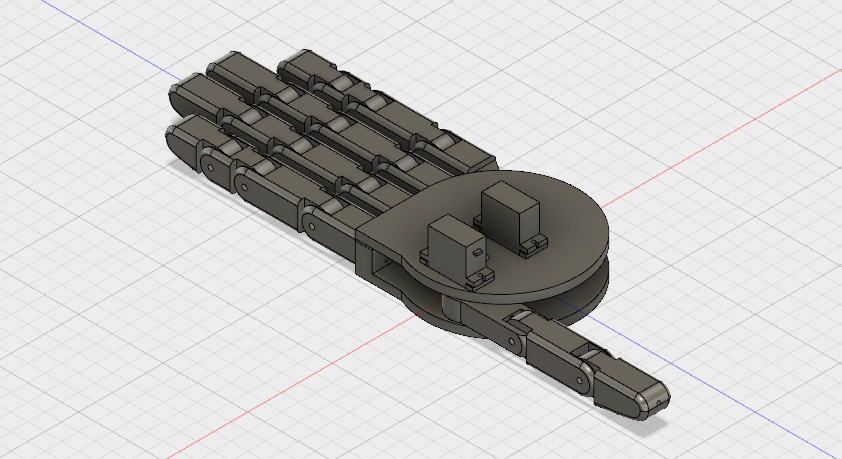
Thumb piece rotated for pinching motion
As the project takes its final shape, the 3D design file will be uploaded with the improvements.
-
CAD model progress
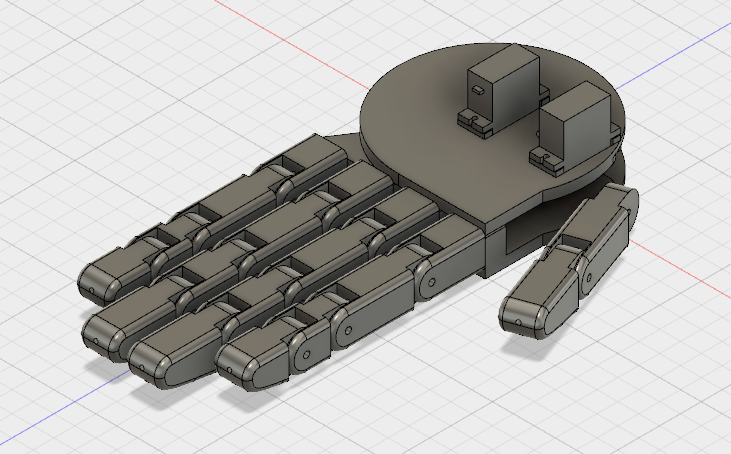
04/12/2018 at 22:40 • 0 commentsBasic outline of the CAD model is mostly finished. The fingers will be moved with a two-wire bowden cable system (chosen for their flexibility and ability to transmit mechanical force) which can effectively move the fingers in both direction - by pulling them from either up or down and forcing them to bend - without having to rely on springs to pull the finger back to default position. This also means the fingers actually keep their positions whenever the servos are not being rotated.
![]()
The fingers on their default position (Not final version)
![]()
The fingers on the high torque position (Not final version)
The remaining features to be added are;
- Improved thumb connection piece
- The management of the wires that actuate the fingers
-
Basic sketches and cardboard model
04/02/2018 at 23:15 • 0 commentsIn order to create the 3D model easier later on, I sketched the basic shapes and measurements and also cut out a cardboard model to make sure the fingers could move as I wanted them to.
![]()
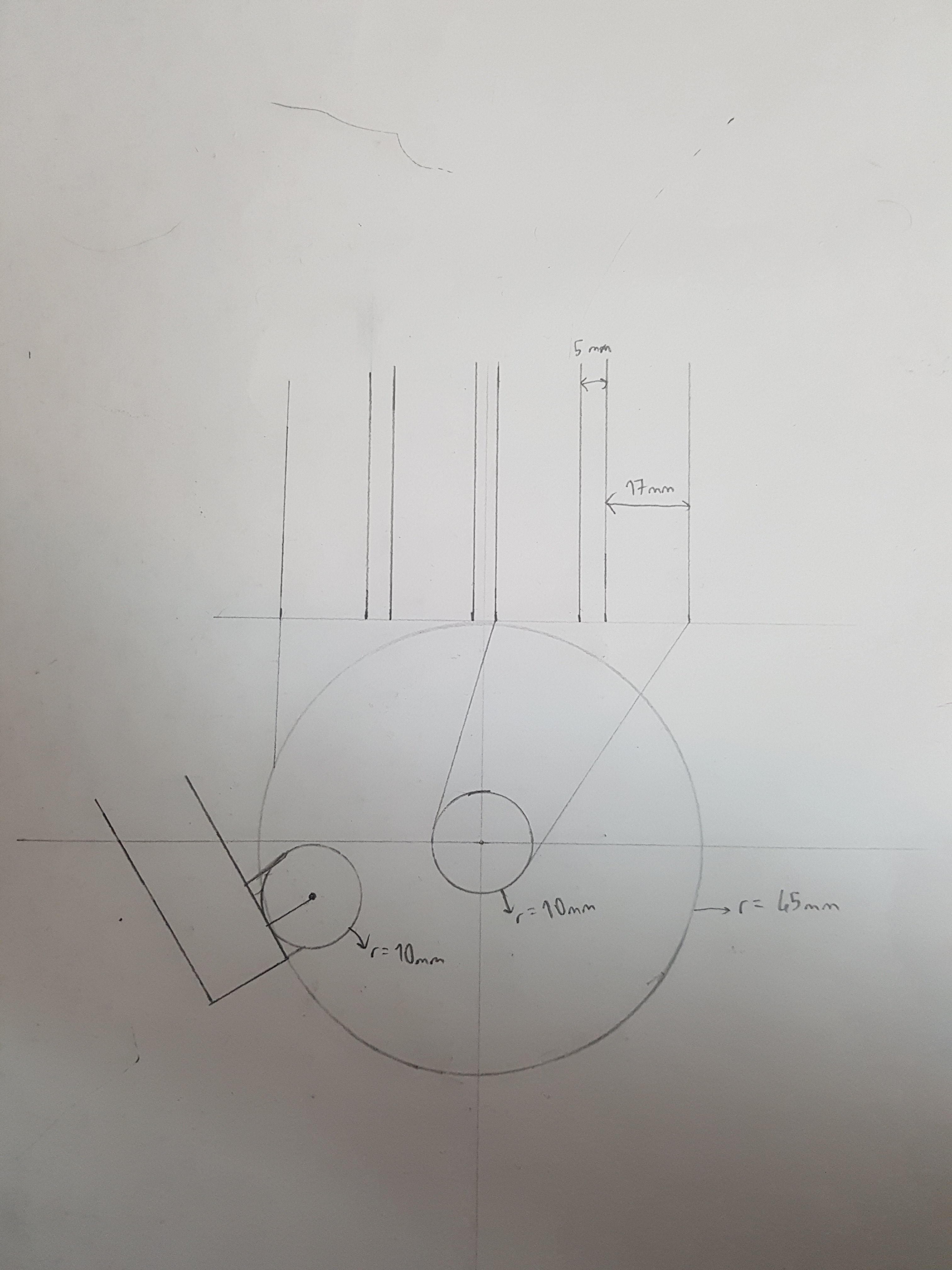
The basic measurements of the gripper can be seen in the picture above. The center of the 10 mm circles will be attached to the servos and will work as a point of rotation. I might need to alter the measurements in order to make the pieces fit better together.
![]()
![]()
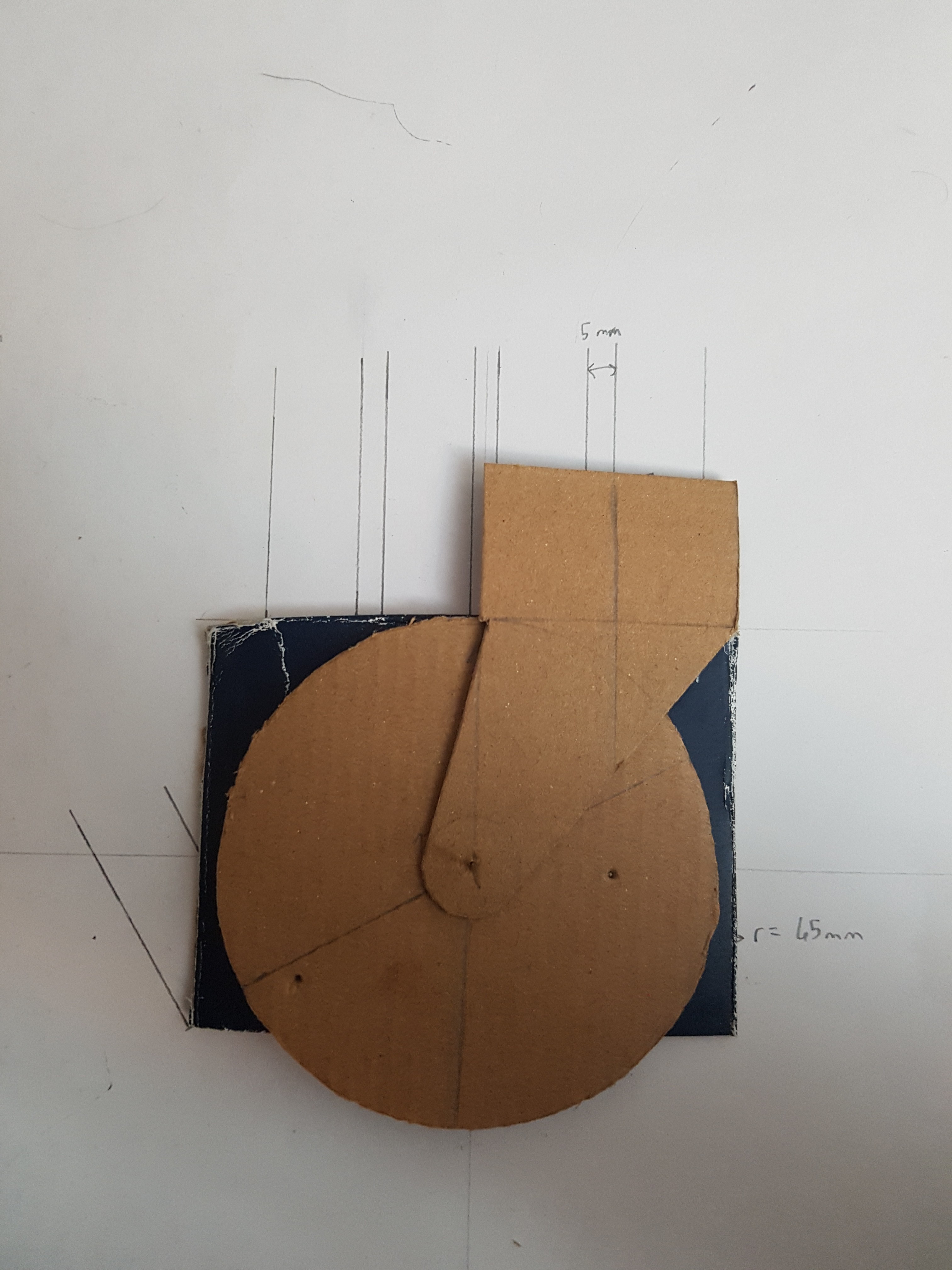
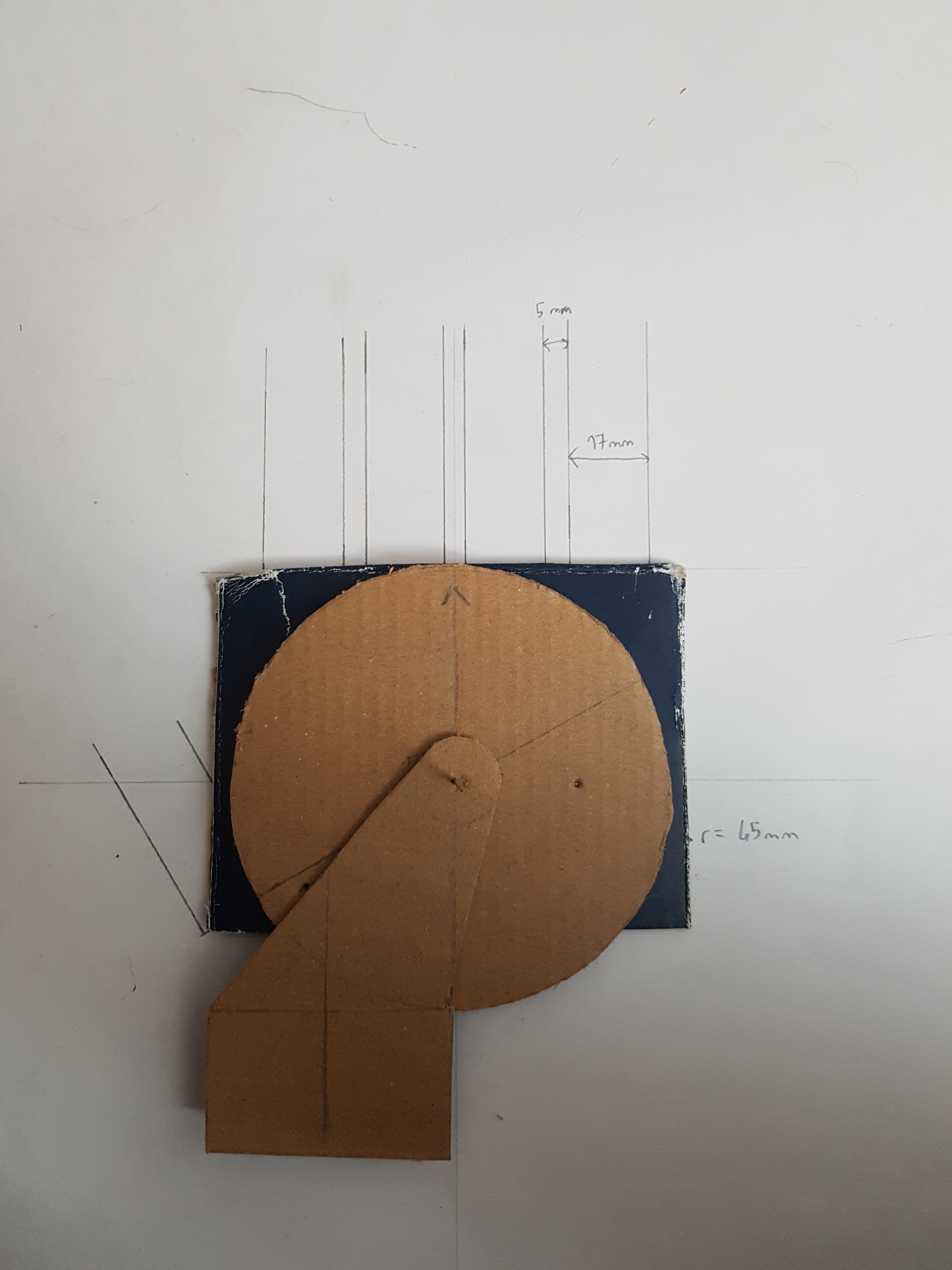
The cardboard cutout that shows to intended movement of two of the three fingers that will be able to rotate around a total of two axis.
Robotic Hand With Interchangable Gripper Types
A robotic hand design that can change the positions of its fingers to achieve better dexterity