 AVR
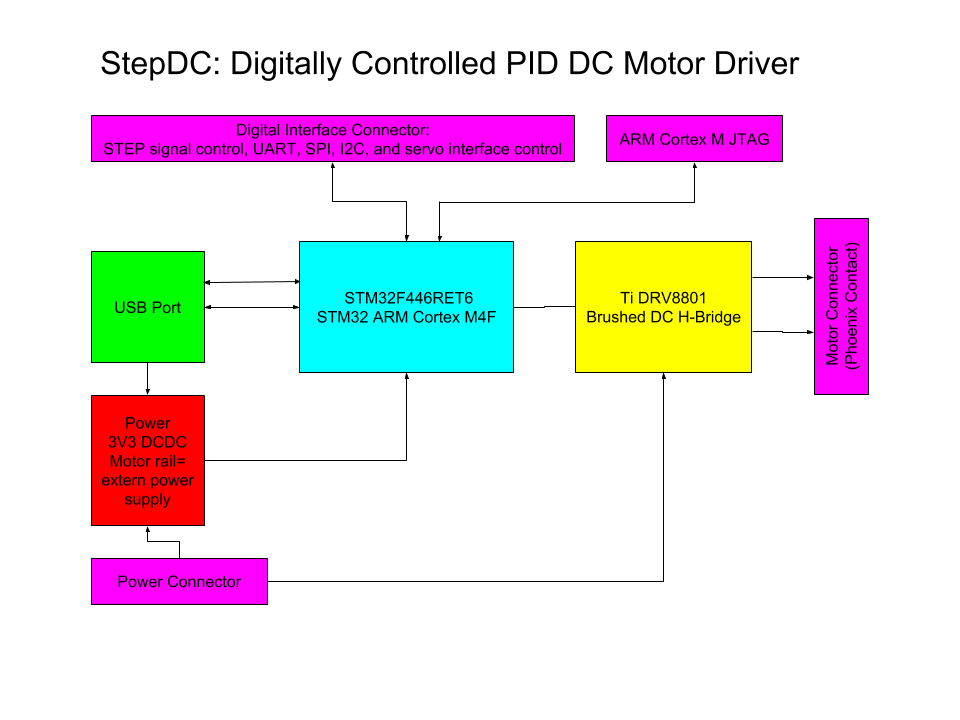
AVRTakes in either stepper drive signals, PWM speed control signal, or serial commands and drives a DC motor with an encoder using closed loop control (PID loop etc).
Quick Specs:
- STM32F446RET6 ARM Cortex M4 MCU
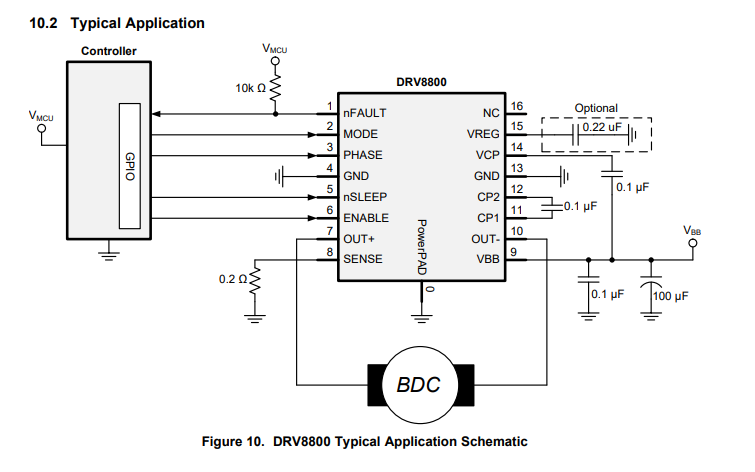
- Ti DRV8801 H-Bridge 8V-38V 2.8A
- Ti DCDC regulator of some variety
- Robust Phoenix contact connector for motor
- 2.54mm shrouded header for signals
- In addition to STEP signals UART, SPI, I2C, and servo PWM interface will all be available on the same connector.

 Frank Herrmann
Frank Herrmann

 Jason
Jason