0%
0%
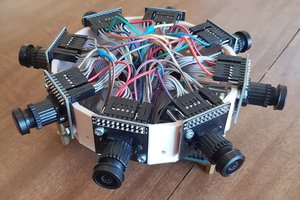
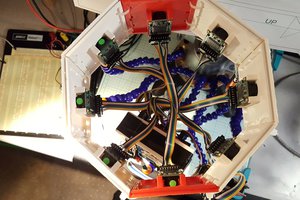
DIY Stereo Camera
Creating an open source and economical Stereo camera dev kit. For VR and 3d video use.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Mark Mullin
Mark Mullin
 Dan Schneider
Dan Schneider
Have you seen this?
The hardware is quite expensive but in terms of processing power it'll be overkill....