 ZaidPirwani
ZaidPirwaniI have always wanted to make and program robots with complex algorithms, maybe do a trajectory following robot, a path planning robot, SLAM, swarm robots and what not. To do all that, I needed a robot first and to learn how to control robots intelligently, did an online course CONTROL OF MOBILE ROBOTS - https://www.coursera.org/learn/mobile-robot
The robot used in the course Khepera III, I thought why not get one, then i saw the cost.
Khepera IV costs 2650CHF which is about 2695 USD and 282554 PKR (my currency)
e-puck, another similar robot costs 950 CHF, which is 966USD and 101293 PKR.
So, cant afford to buy these bots, and hence this project started to make my own, within a budget of max 350USD, but trying to squeeze the budget down to 250USD for all hardware costs. This will be completely open source, though I do want to e able to sell it in a Kit/assembled form if anyone wants to buy the bot form me.
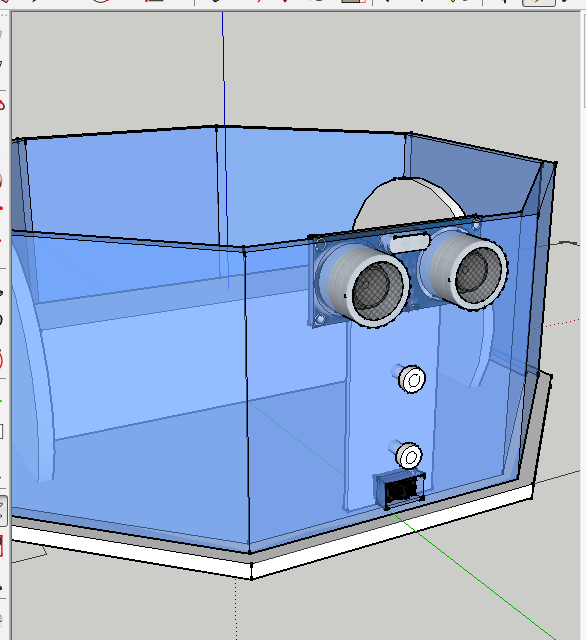
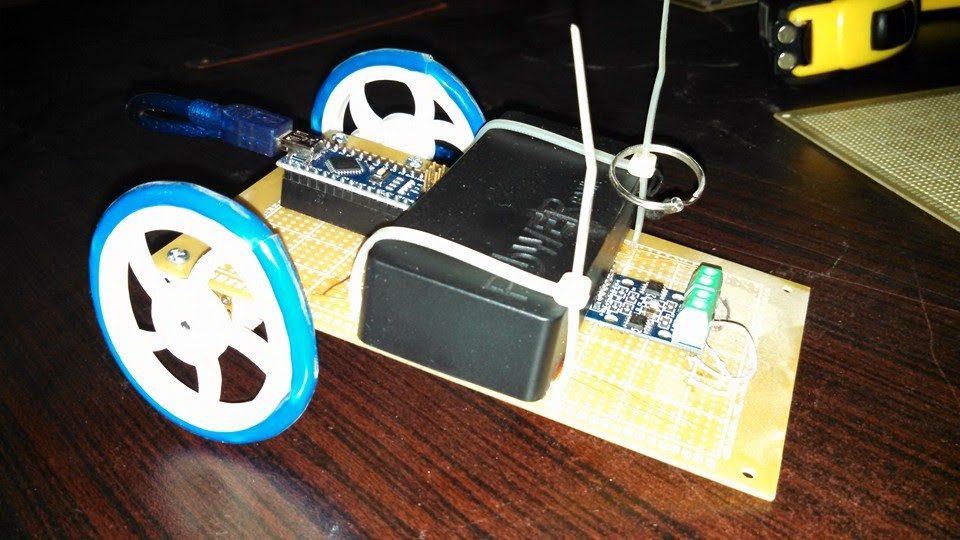
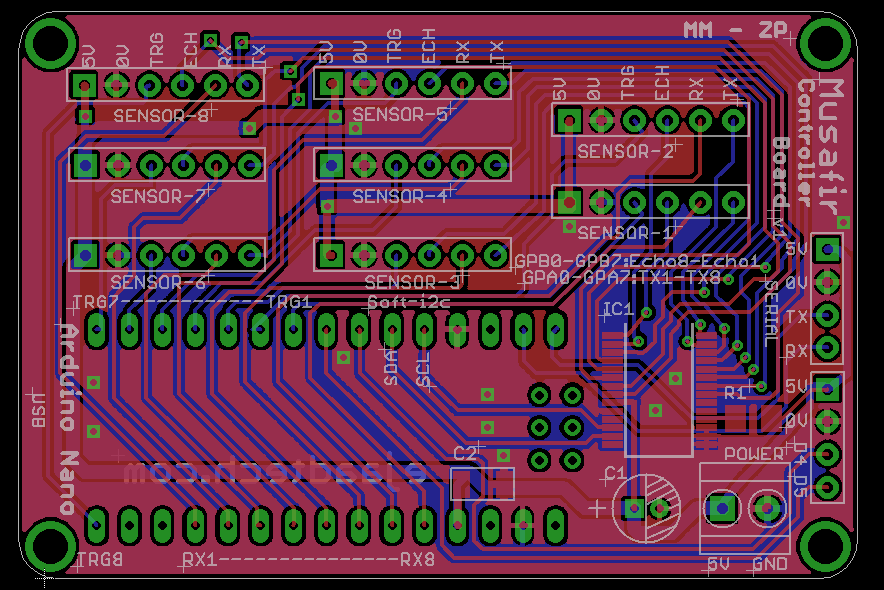
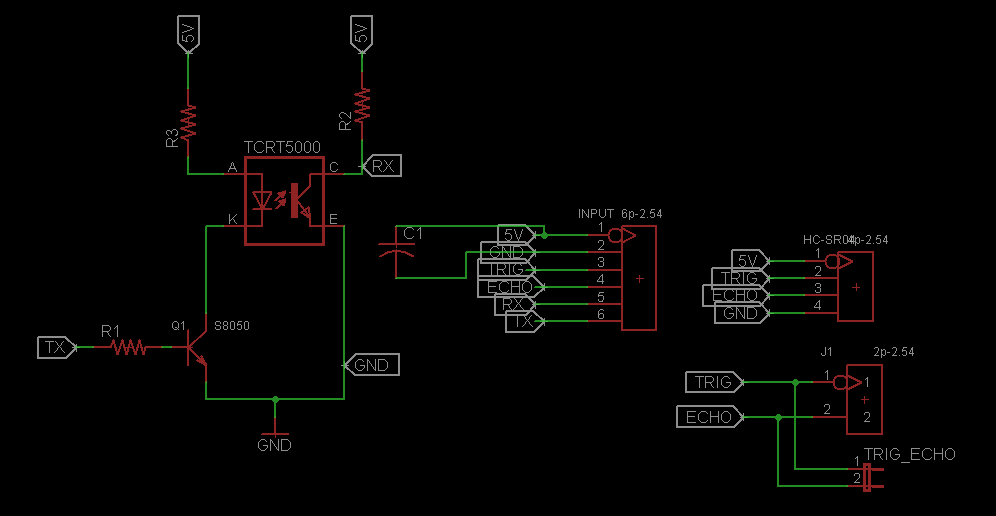
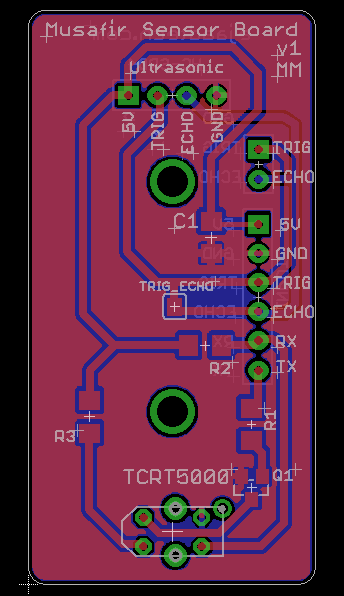
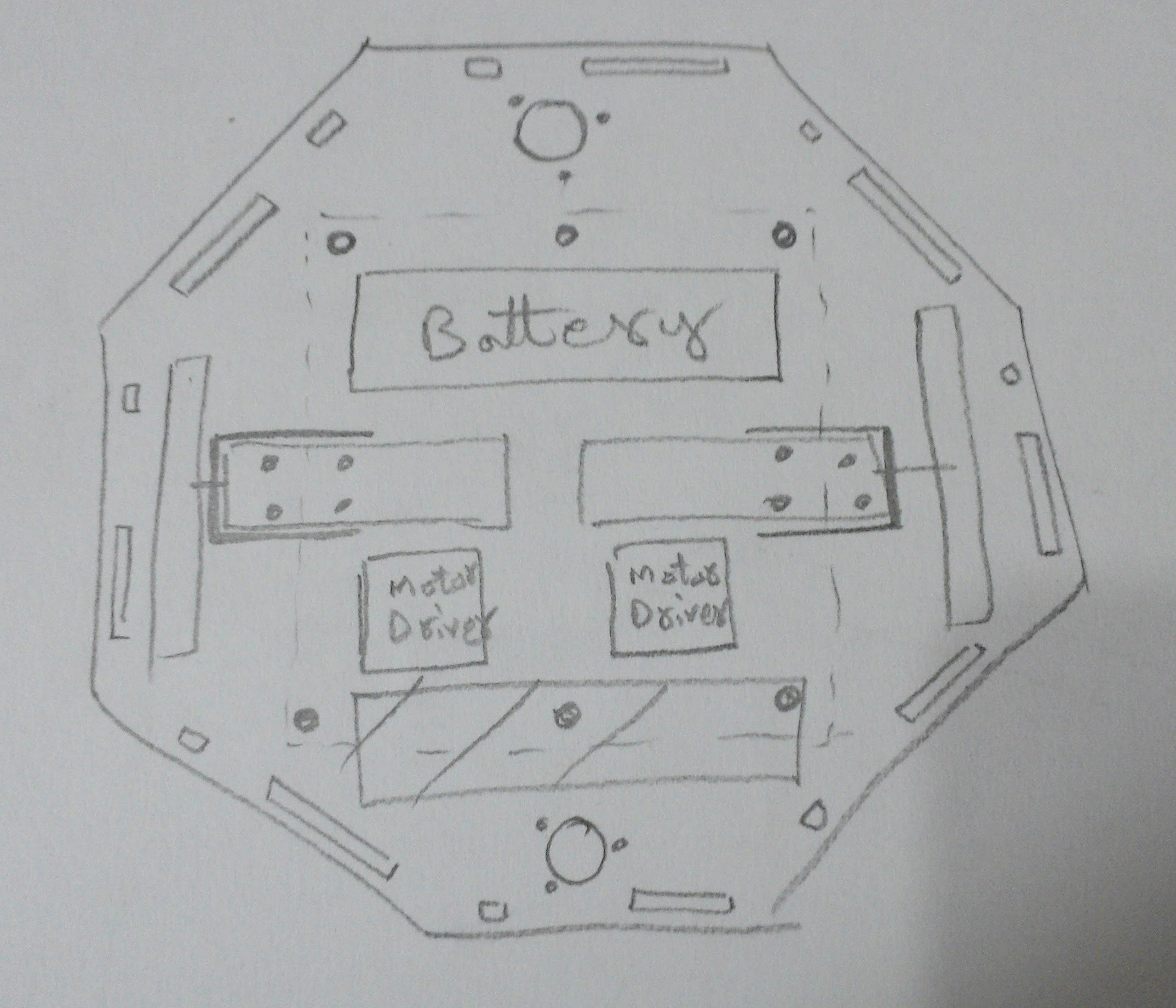
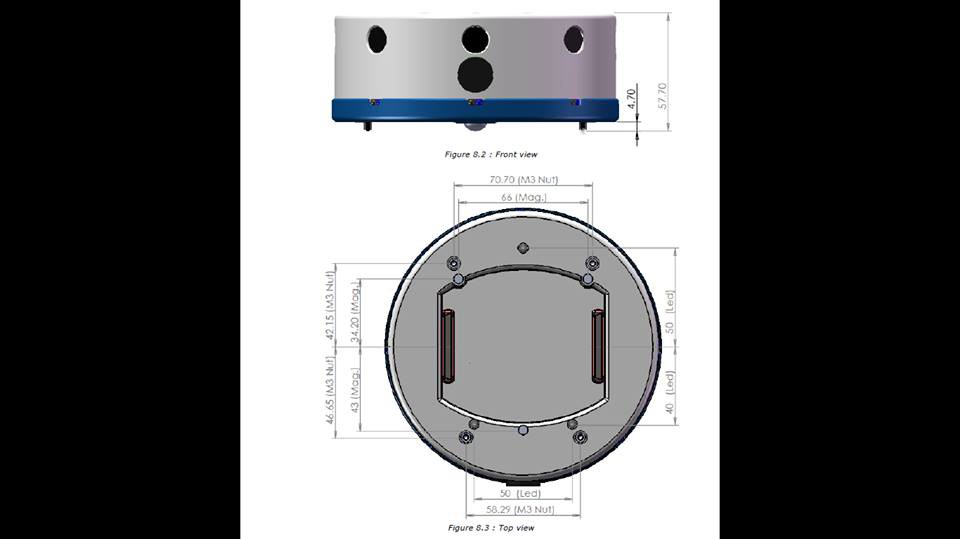
Mine is similar to the Khepera, a bit bigger, heavier, but most similar sensors.
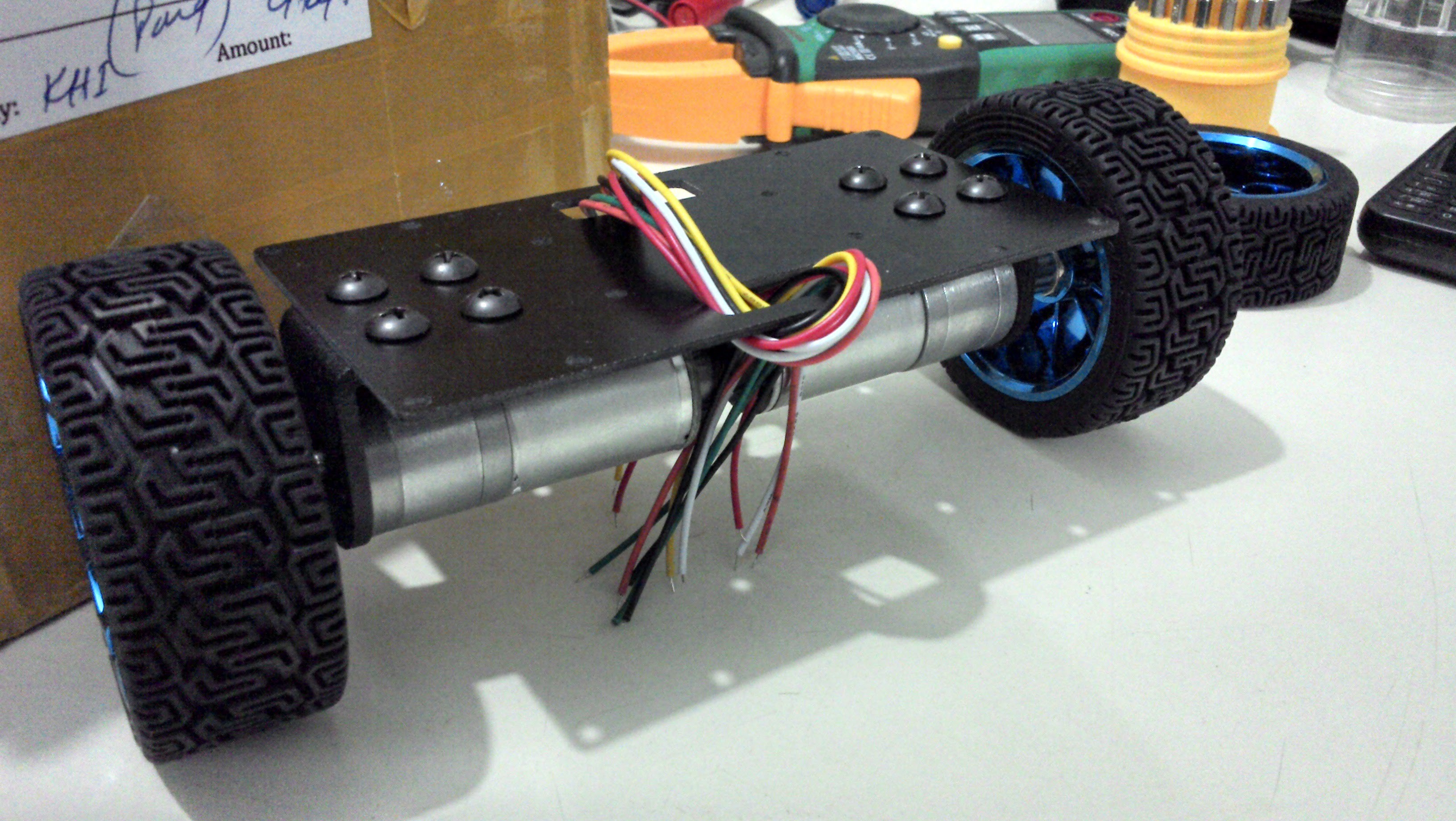
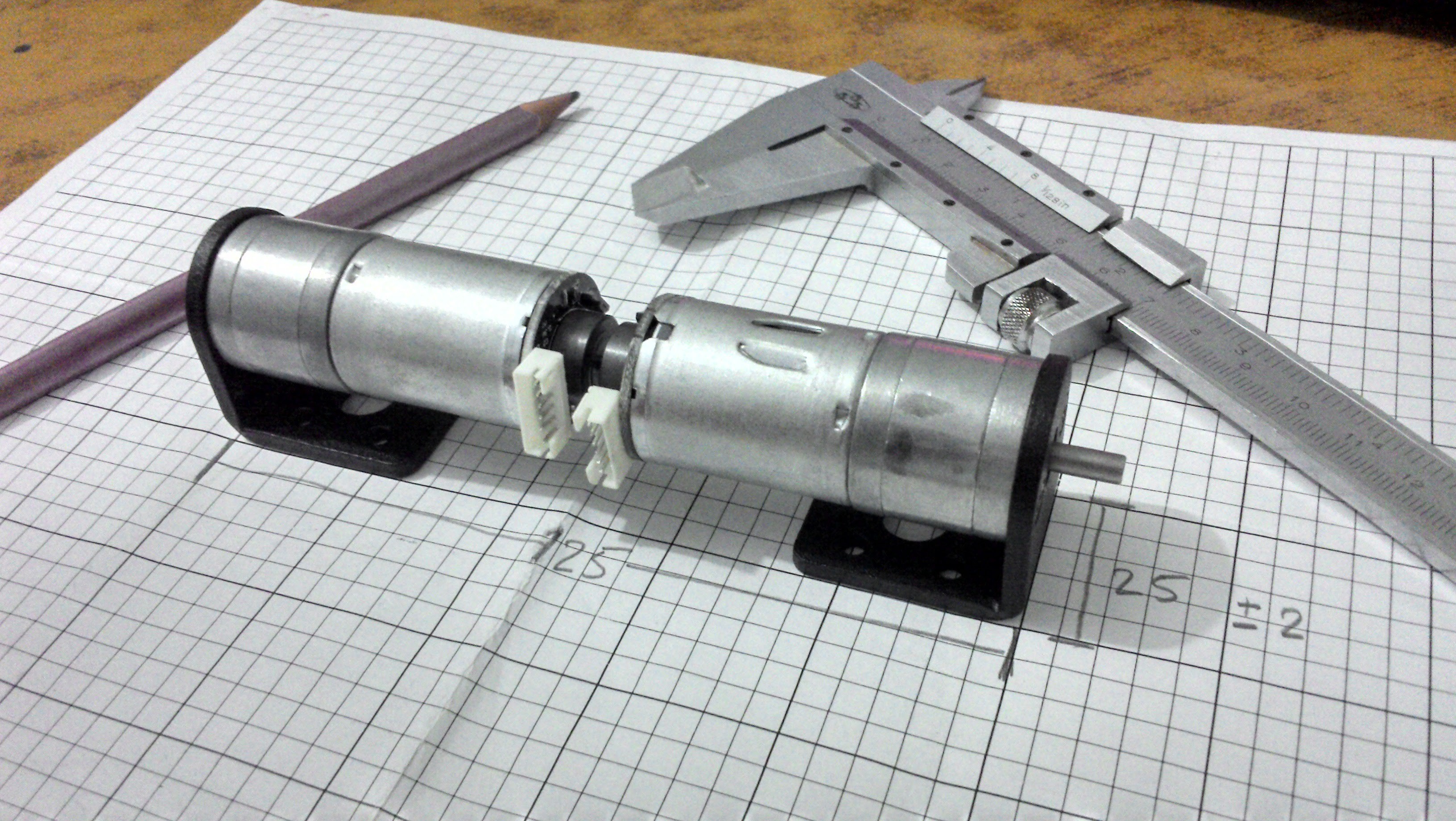
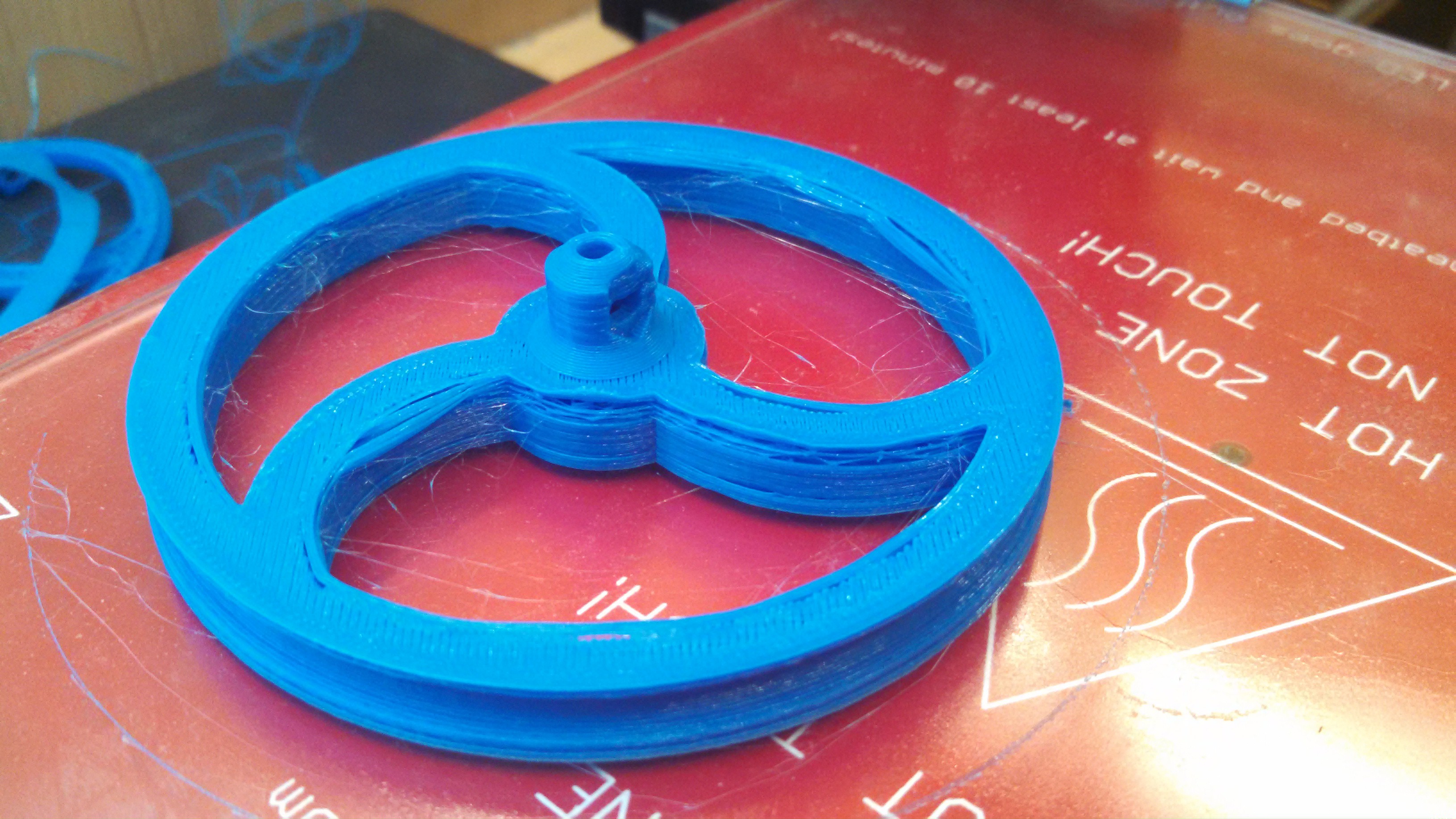
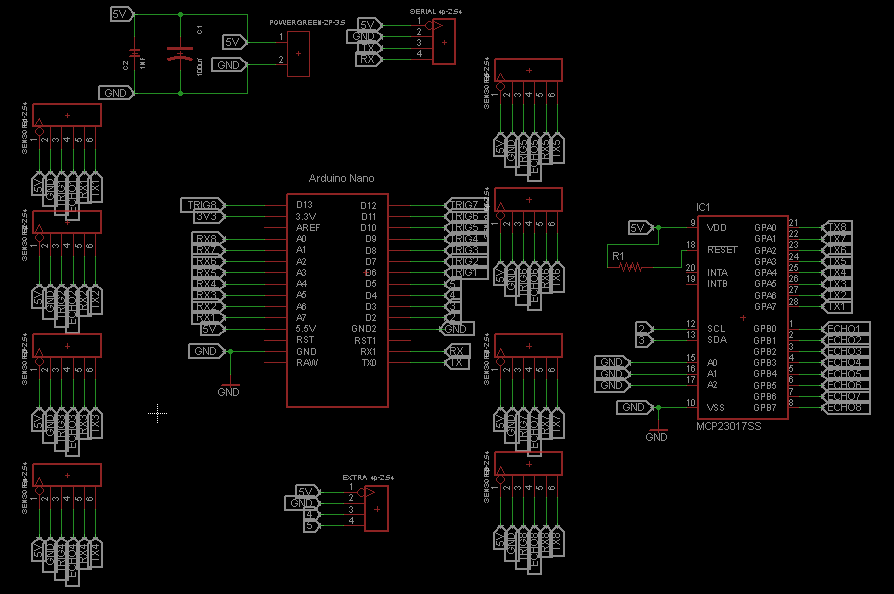
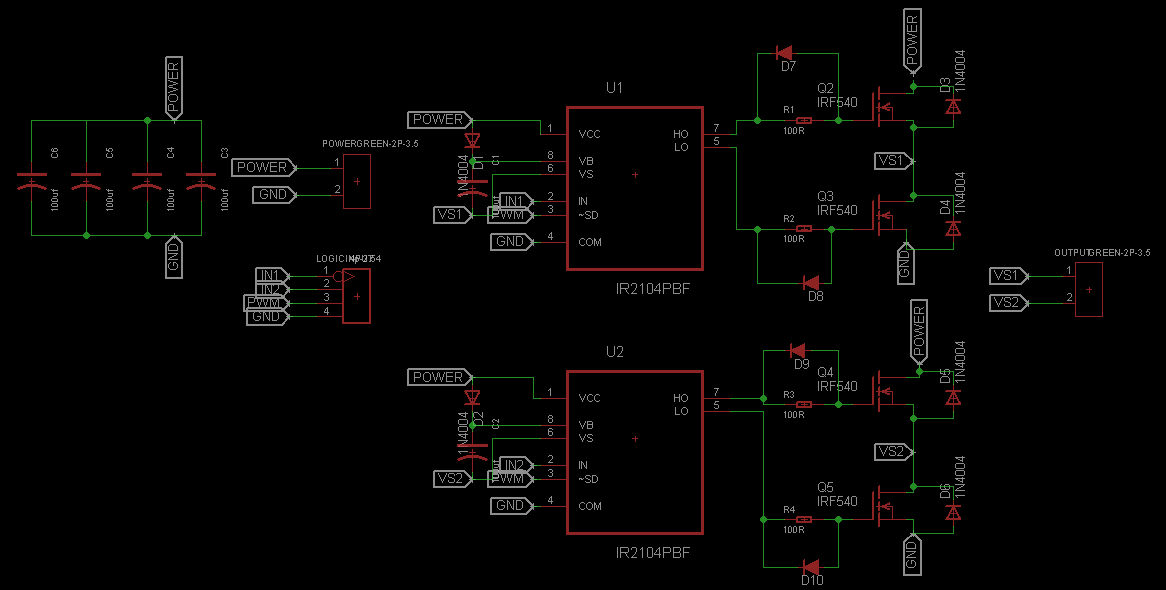
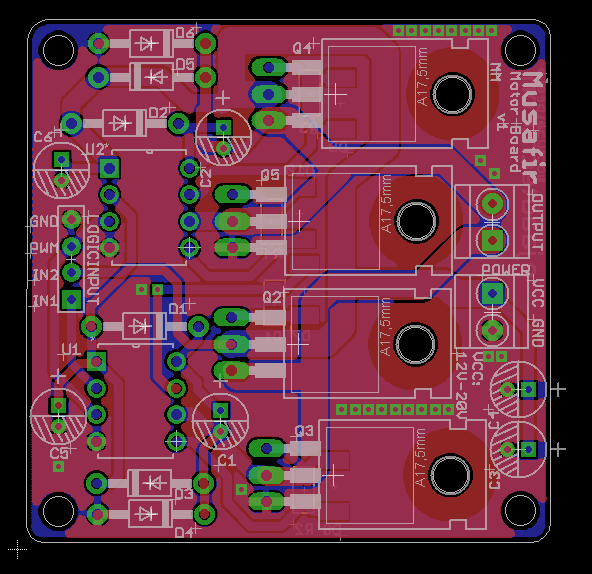
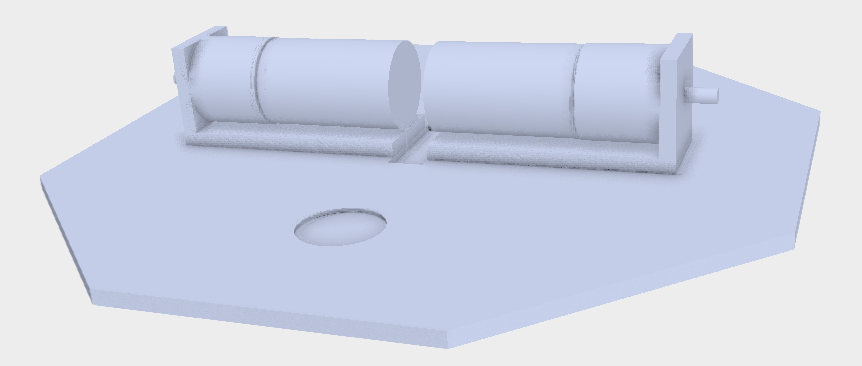
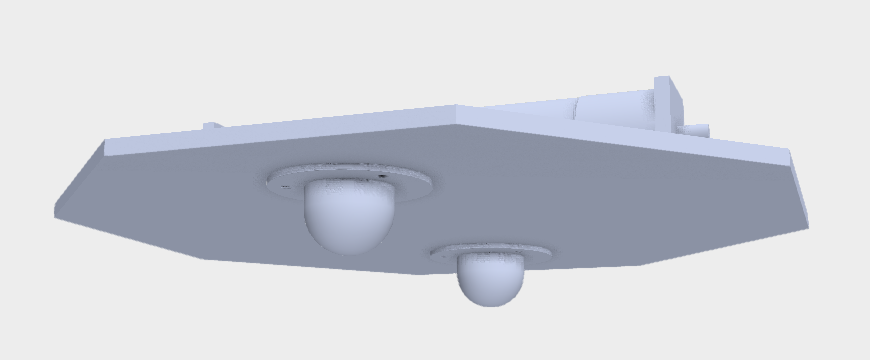
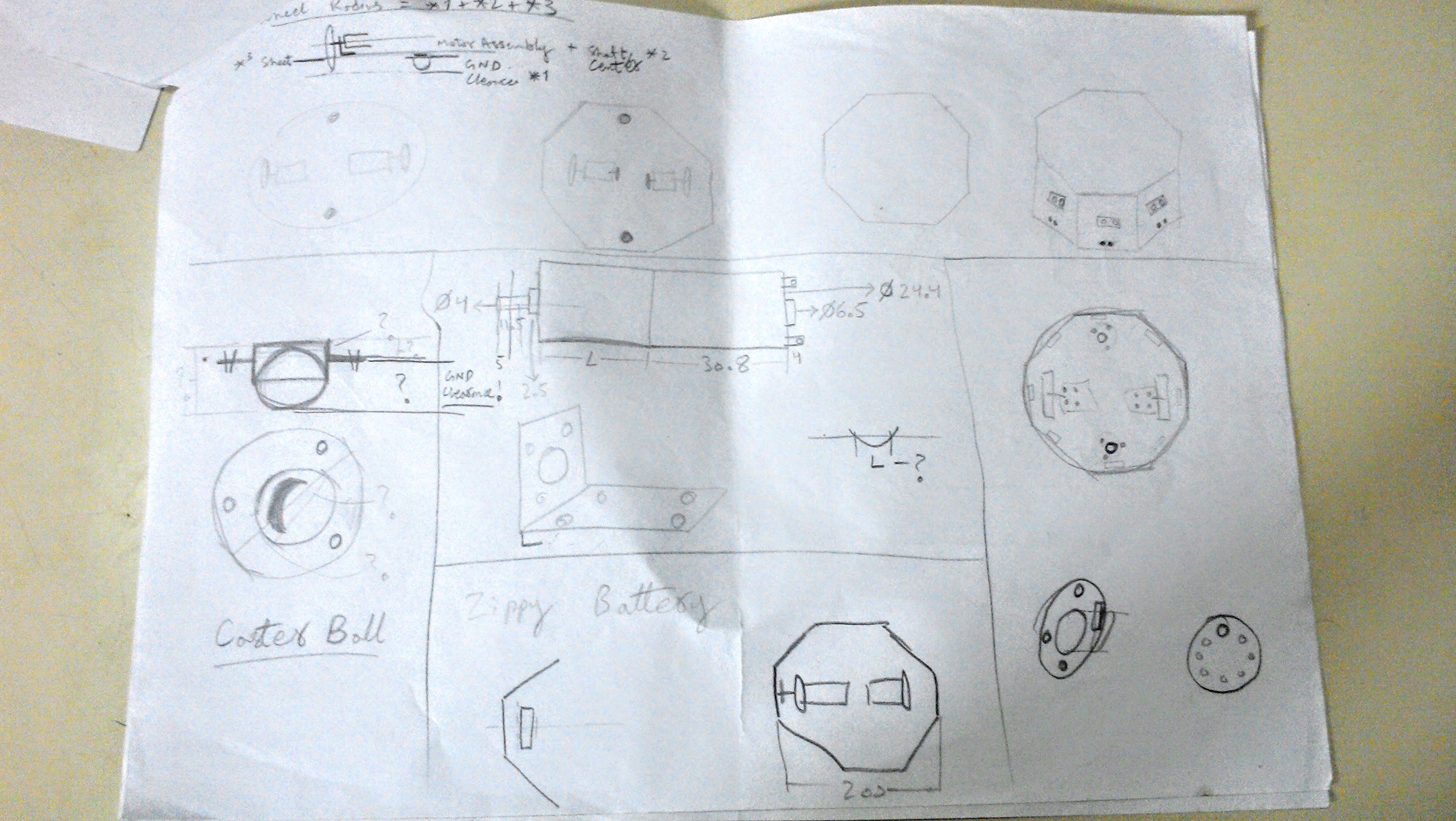
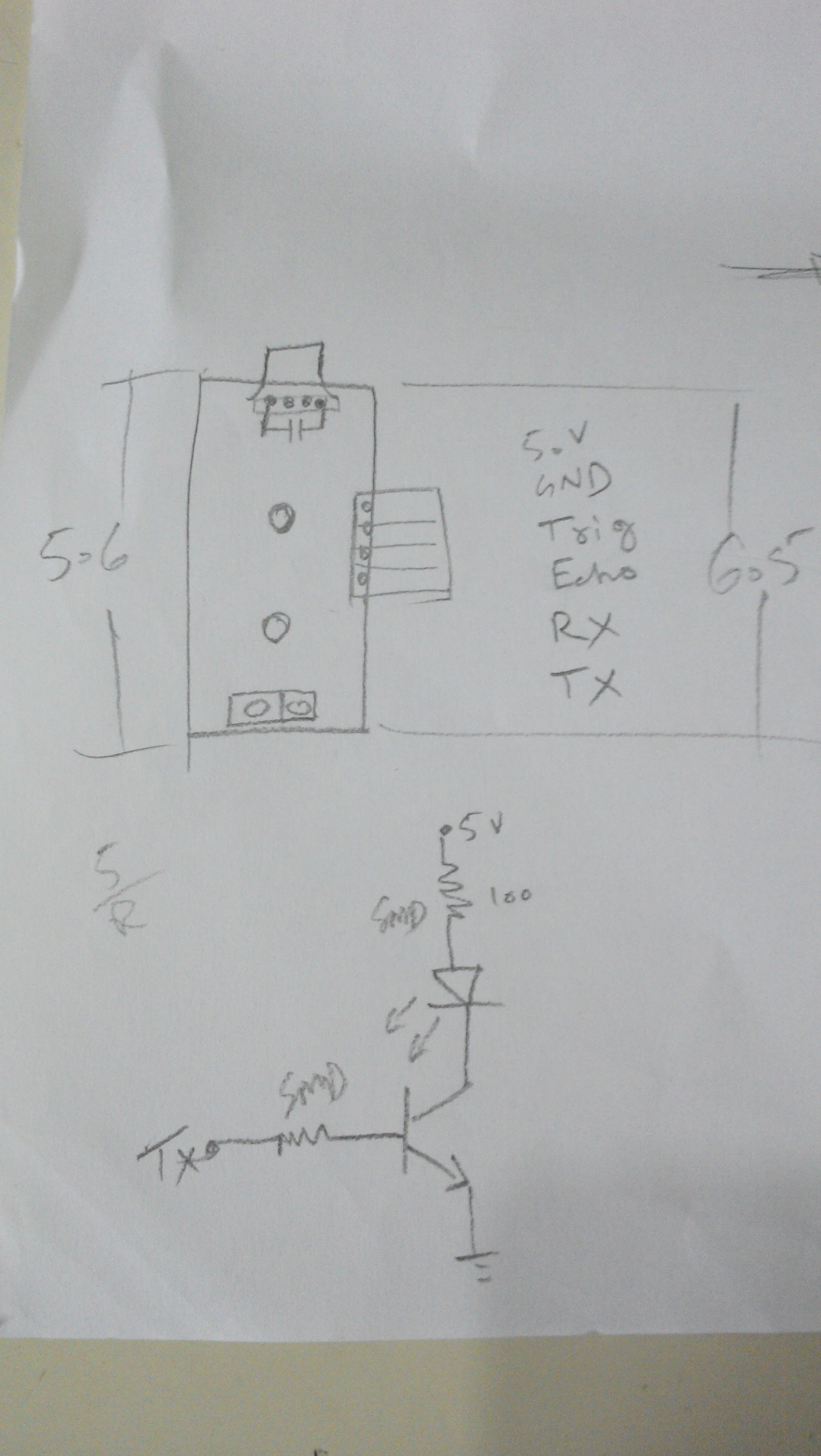
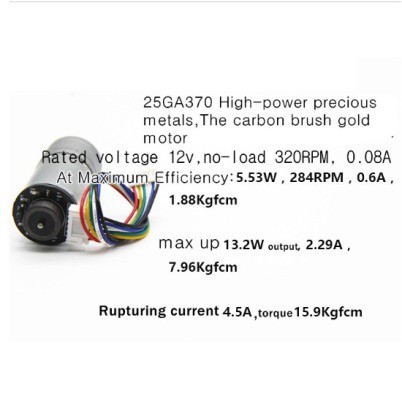
Take a look through the logs for the work done so far, most is yet just rough sketches and PCBs sent for fabrication. the actual work tarts when I get all the orders shipped and get my motors and have the body LASER cut from acrylic parts.


 DIY GUY Chris
DIY GUY Chris
 Diana
Diana
Cool if such a robot can help in academic research. Students so often lack resources, especially in writing dissertations and scientific stuff. When I was writing my dissertation, I used special service for help since I did not have the time and the ability to finish everything myself on time. Guys from https://ukessay.com/help-with-dissertation-writing helped me with my work. I hope that such innovative ideas will make the research and educational process more effective. Your project definitely deserves financial support from outside.