 Floz
FlozCurrently we have two chassis.
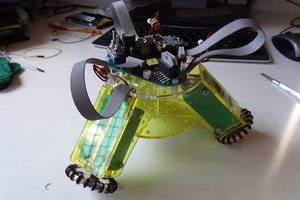
- tracked excavator hull with the bottom-most portion of it's digger arm remaining
- off-road "rock-crawler" style with a futuristic buggy shell
Both have motors, radio receiver boards, motor drivers, etc.
The tracked chassis is a skid-steer, obviously. The rock-crawler style chassis has more traditional car-type steering. For toy-grade rc cars, this typically means a small brushed DC motor with geartrain and torque-limit device (servo-saver in hobby parlance). I've designed and 3d-printed an adapter for a hobby servo to (hopefully) replace this complex geartrain and full-swing-only steering. The servo arrived, and I've been hacking away at the plastic structure with a dremel, test-fitting, and rolling ideas in my head about the 3d printed portion to come.
Both run on small brushed DC motors, and a direct-swap to hobby-style (540 can size) motors does not look straightforward. However, in hacking the steering, I have now freed one motor that looks to be a direct replacement (same pinion, except in metal!) for the drive motor. I have also removed the front-axle's motor and drivetrain, converting the vehicle to 2wd for now.
Common arduino motor driver shields are in testing currently. I have also considered using an i2c PWM controller with a hobby ESC. My concern is that most hobby ESCs pass a fair amount of current when prompted, and I may find myself repeatedly fragging these small brushed motors.
As for armaments, this is still very much a "drafting table" part of the project. Scratch-built options, such as a brushless outrunner powered flail will consume a considerable amount of design time. Off-the-shelf solutions, such as a modified cordless saw will require balancing size/power with the chassis' capability to carry it.
Controls may require an off-the-shelf replacement or custom-built solution. Bluetooth gaming controllers are a very attractive option, with the low-cost of BT receivers. Range is a concern, however the robots will likely be no more than 5 to 6 feet away from their operator at any time.
Lastly, fail-safes. As we will be writing the software for each robot as it is developed, the mantra of "When this goes completely wrong, how do we stop it?" is repeated throughout. A cordless saw mangling a lithium cell rapidly turns into a completely destroyed robot and using a fire extinguisher once the reaction has run its course. Shorted components during battle must be met with existent and novel solutions. Appropriately fusing the primary power source for both drive/control and weapon is a MUST. In addition, weapons should default to idle/off. Should the robot's control systems become too badly damaged to respond to commands, all weapons and drive systems MUST fail to idle/stop.




 Mike Rigsby
Mike Rigsby
 Charles Galambos
Charles Galambos
Going to do a total rebuild of both robots this year and hopefully add weapons.