 Charles Galambos
Charles GalambosWhy do this? There are lots of reasons - mainly because it’s a seriously fun experiment, but also it might show that with the cost of hardware reduced and open sourced, we can get collectively closer to a viable way to assist rescue workers in disaster situations, or just navigate our built environment in a way that wheeled robots can’t do. The DogBot also provides a platform for AI researchers to put their theory into practice, somewhere they can test that their simulations work under the difficulties and irregularities of real world conditions. If more people can test on this platform, without first having to find a research grant, we think the field will start to move forward a much faster pace. When you think about it, the industrial revolution and the current AI revolution have both benefited from rapid iterations by multiple participants - a lower cost robot means more reasons to iterate in the physical world.
We hope this project acts as a catalyst for this field. The next step is applying the same logic to humanoid robots, but a nice place to start is with man’s best friend.
To give you a taste of what it will look like once it is working, here is a gazebo simulation of a trot.
Everything in the project that I have created is licensed under the creative commons attribution license. The firmware for the motor controller uses chibios which uses either GPL3 or free commercial license and Apache 2.0 License (See http://www.chibios.org/dokuwiki/doku.php?id=chibios:licensing:start for details). The firmware is still very much work in progress, though care will be taken to make sure the final code can be used freely in open source projects.











 Danny FR
Danny FR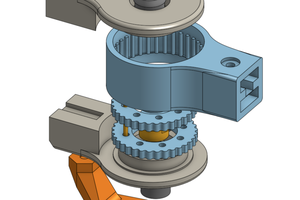
 Tim Wilkinson
Tim Wilkinson
 Darren V Levine
Darren V Levine
Great Project!
Would you be willing to share some more info on your gearboxes? I am struggling a bit with figuring out my compound planetary design to get the ratio's I need. Having problems with figuring out the correct tooth count and modules that lead to the common center distance for the planets.