 RigTig
RigTigRB3DP
Print volume is big: 1 to 100+ cubic metres.
Cost is small: less than US$100.
Speed is slow.
Accuracy is low.
It is a work-in-progress.
Big
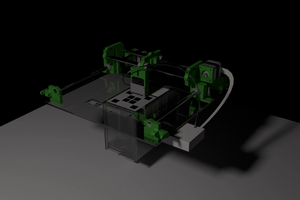
The RB3DP can print bigger objects than most other 3D printers. One unusual characteristic is that the print base is triangular. The test prototype was somewhat less than a cubic metre. The second installation was about 5 cubic metres. The design is flexible about the size; it just needs enough string. Not yet tested, but 5 to 8 metres in each direction seems workable and probably even more. Each installation does need to be measured to calibrate the printer.
Inexpensive
The DIY cost to make a RB3DP is significantly less than one hundred dollars (USD100), plus 3D printed parts.
References
@Daren Schwenke found this very up-to-date and relevant publication about cable supports: https://www.researchgate.net/publication/316606621_On_the_effects_of_the_design_of_cable-Driven_robots_on_kinematics_and_dynamics_models_accuracy


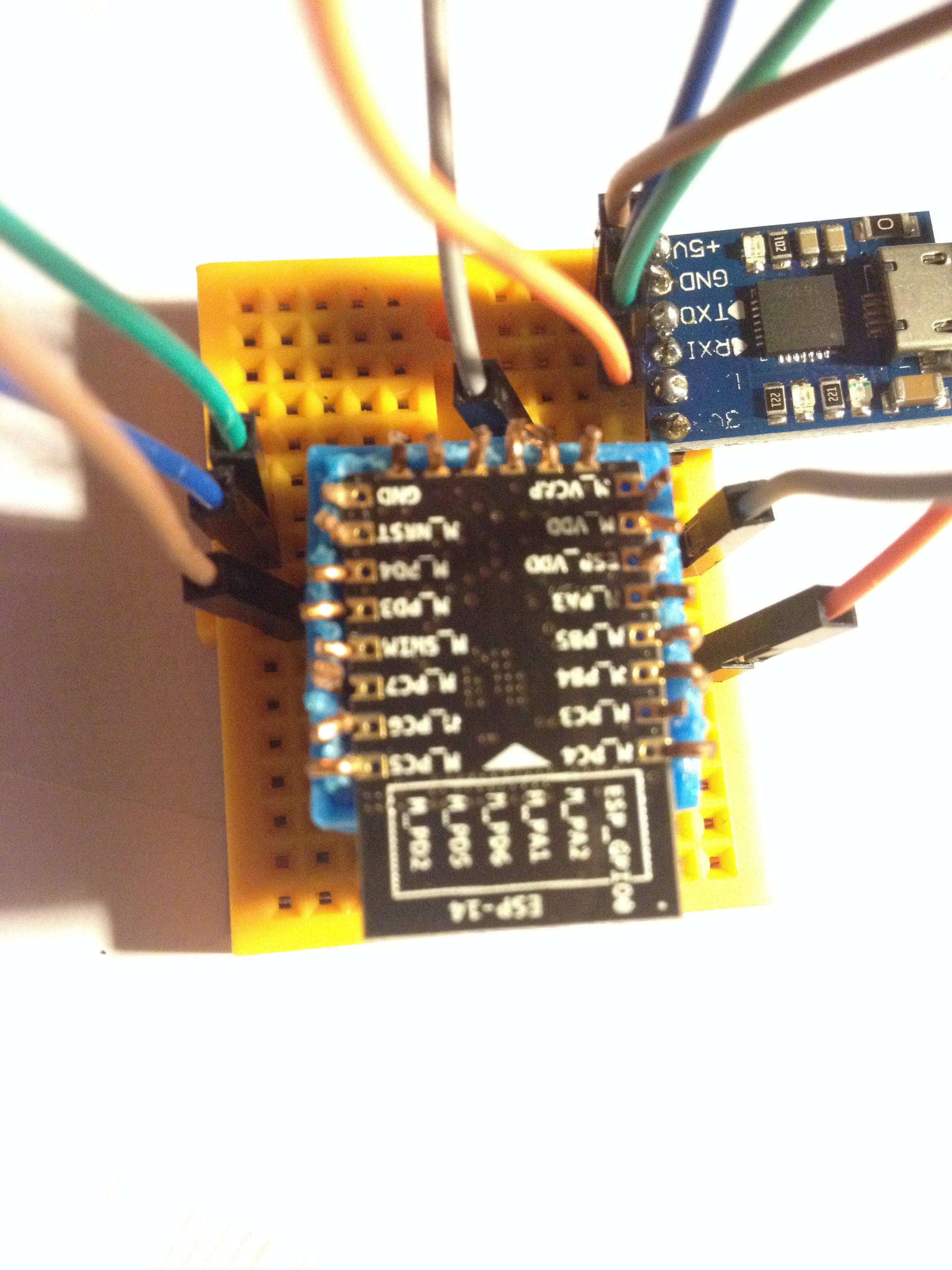 Now, my job is to get back to the motor driver and get it to communicate with this ESP14. Since ESP14 is a wifi access point, I just need to connect ESP12 as dhcp client and set up the tcp channel through a chosen port (that's relatively easy). And then it is just a matter of getting both ends to behave properly when something (temporarily) interrupts communication (and that is the hard bit).
Now, my job is to get back to the motor driver and get it to communicate with this ESP14. Since ESP14 is a wifi access point, I just need to connect ESP12 as dhcp client and set up the tcp channel through a chosen port (that's relatively easy). And then it is just a matter of getting both ends to behave properly when something (temporarily) interrupts communication (and that is the hard bit).









 JLAM
JLAM
 Daren Schwenke
Daren Schwenke
 AccidentalRebel
AccidentalRebel
I am really disappointed that a patent has been granted which covers so much that is already in the public domain on cable- or hanging- printers. My understanding was that it was not possible to include in a patent anything that was already published, yet the patent actually refers to tobben's HangPrinter (hangprinter.org)!!
3D Printing Industry: ORNL gains patent for 'SkyBAAM' cable-hoisted construction 3D printing technology.
https://3dprintingindustry.com/news/ornl-gains-patent-for-skybaam-cable-hoisted-construction-3d-printing-technology-203113/