 Richard Sim
Richard SimAs the projects primary design goal is to exhibit social good uses for autonomous multicopters, there are a few very important implementation details directly related to this goal:
- No video cameras, nor video/audio recording or transmitting.
- No direct user control of the multicopters. A Personal Angel goes to the users location only, and monitors them.
- Personal Angels will maintain a safe distance (20-30m+). This both avoids harassment issues, and makes obstacle avoidance largely a non-issue.



 MagicWolfi
MagicWolfi
 Tindie
Tindie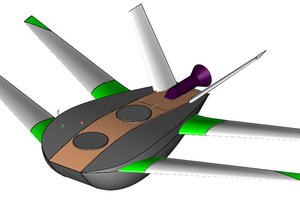
 starlord
starlord
 Paul Bruno
Paul Bruno
I'd strongly advocate for the video camera for this application, even though that brings up other sorts of privacy concerns.