Nelson Phillips
Nelson Phillips-
Control electronics_1
10/09/2016 at 04:25 • 0 commentsAfter morning the loss of my CNC spindle........ and a bunch of side tracks this project continues.
The control circuit for the pneumatic actuation requires a air pressure sensor and a valve driver. Both the pressure sensor and valve driver was designed as separate pcb.
The outline of the pneumatic circuit uses the following outline. A solenoid valve releases the pressure into the pneumatic circuit with the actuation of individual fingers via another solenoid valve in series. In this way any actuation powers the inlet valve and fingers valve. The intention is to enable the pressure to controlled either by a variable valve or second pressure vessel.
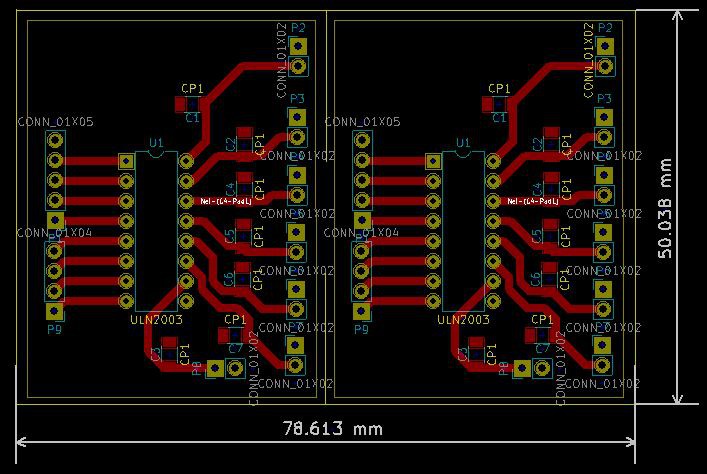
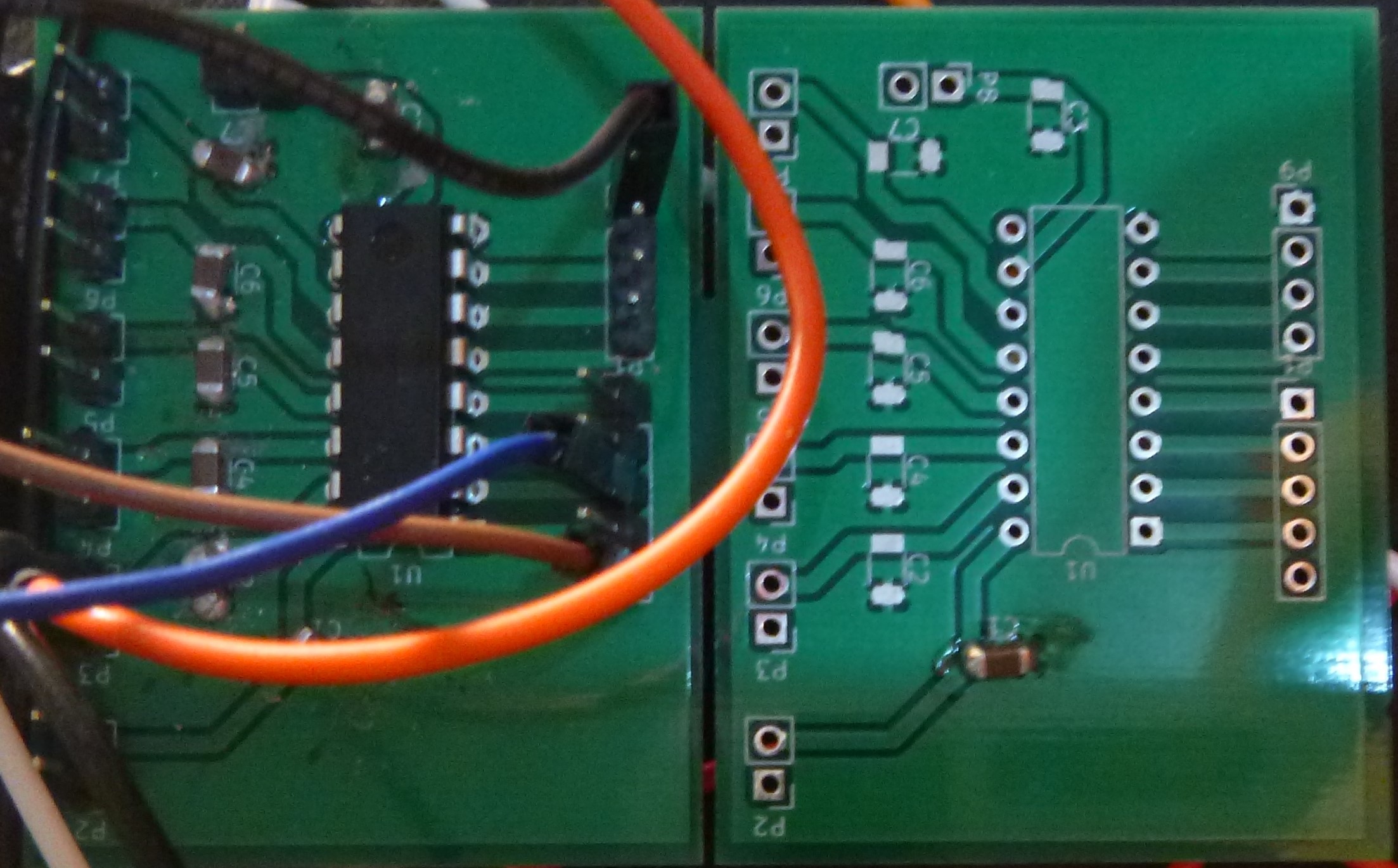
Valve driver.
![]()
![]()
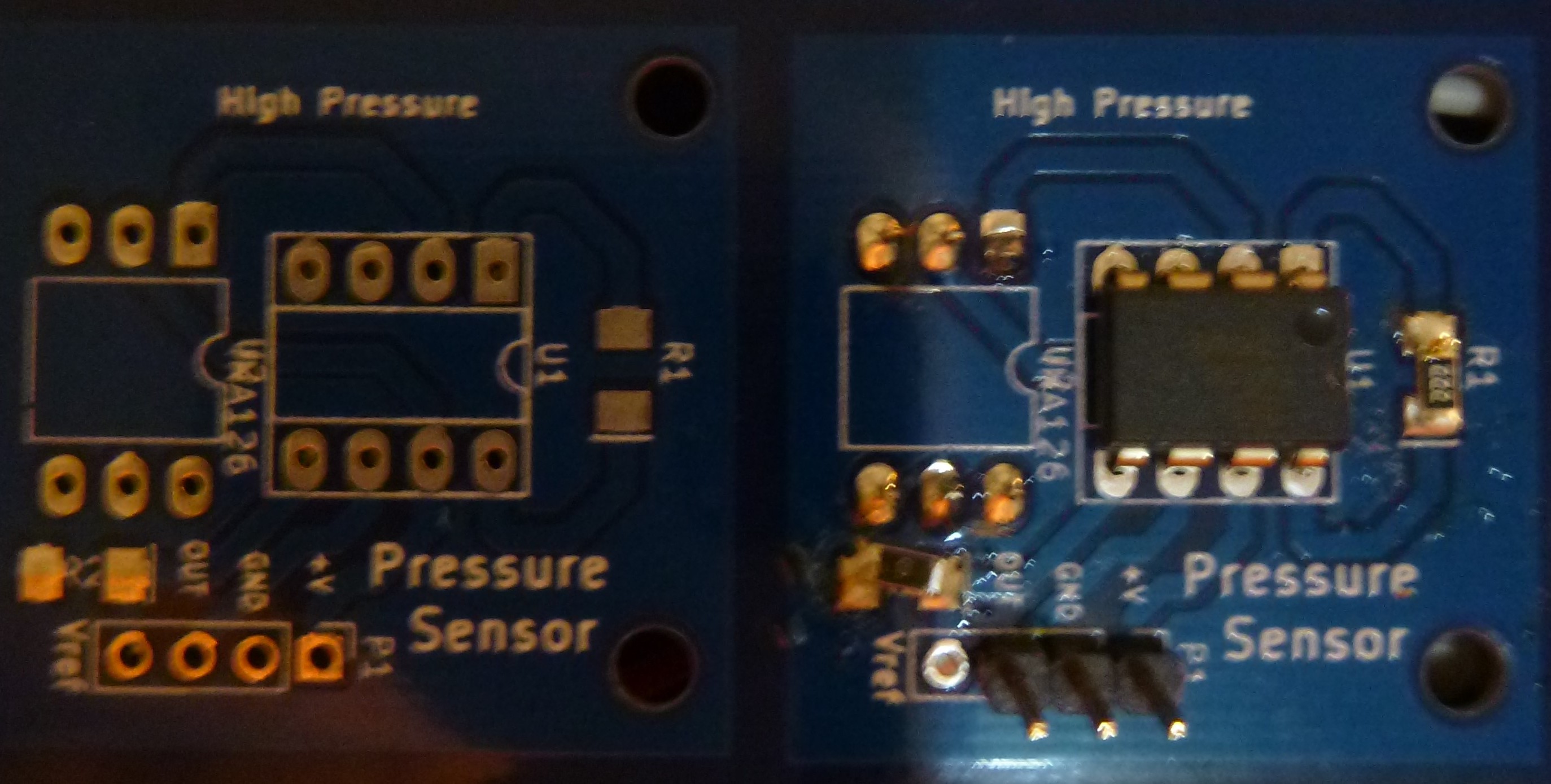
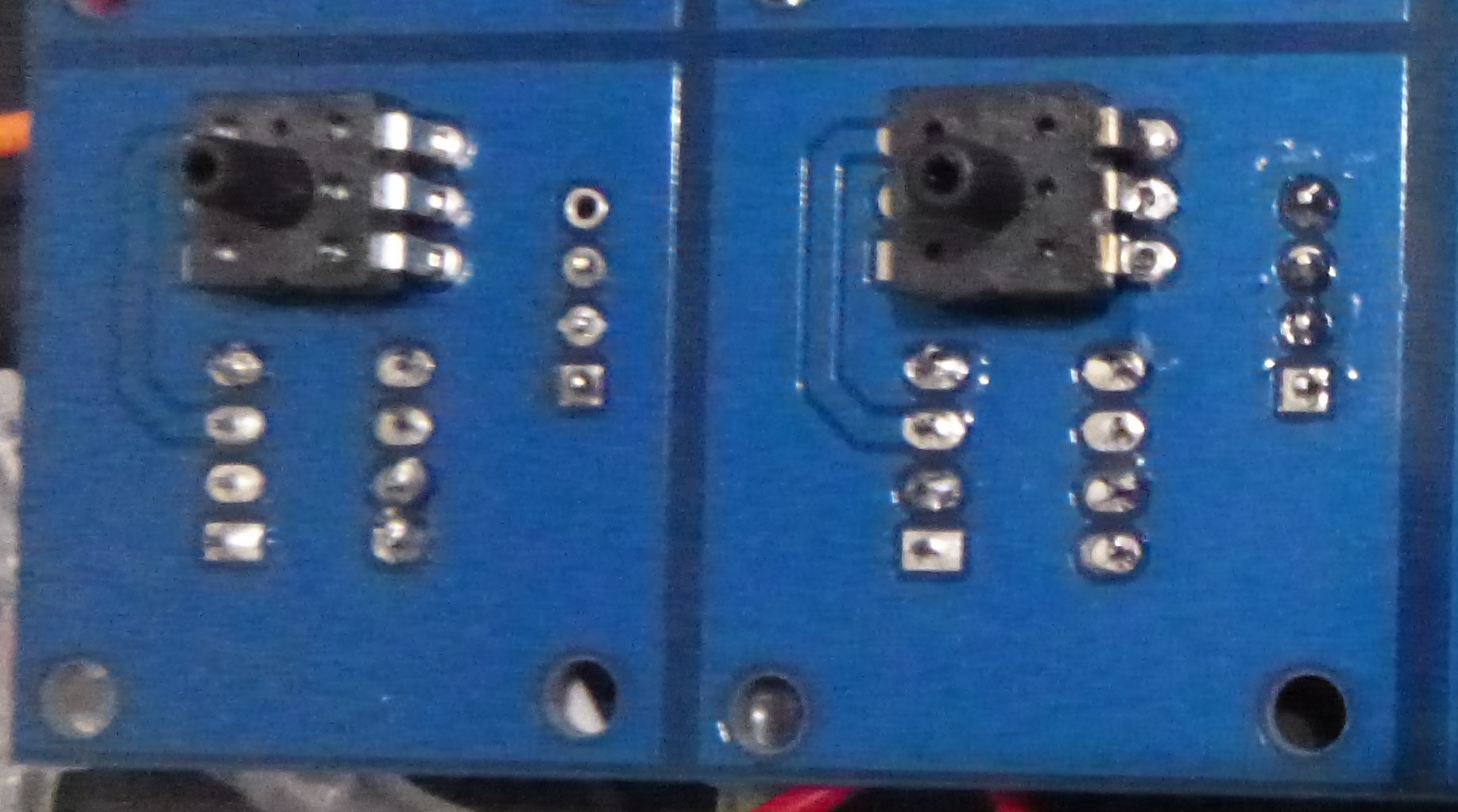
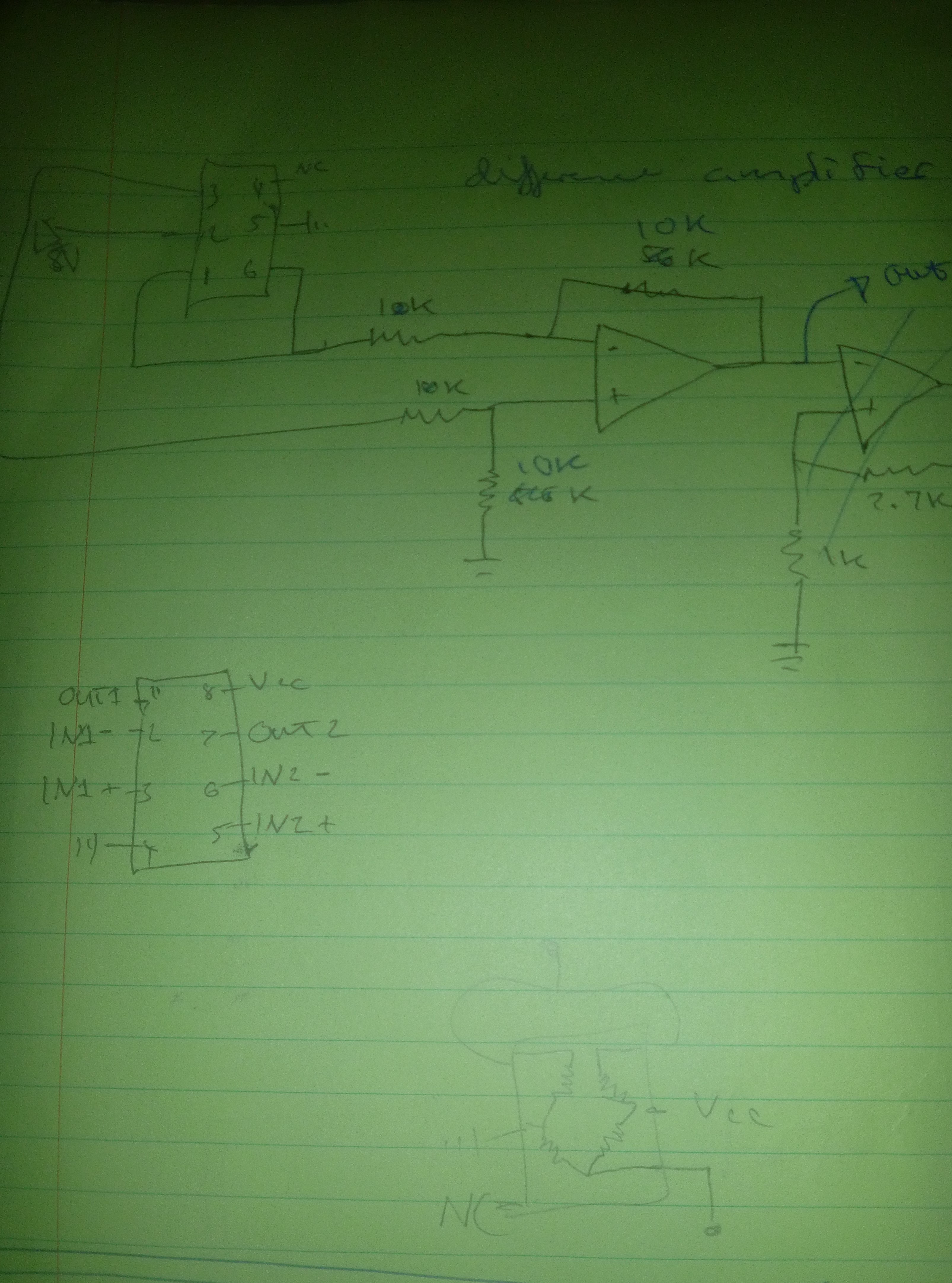
Pressure sensor uses a Wheatstone bridge sensor, instrumentation amplifier and gain resistor.
![]()
![]()
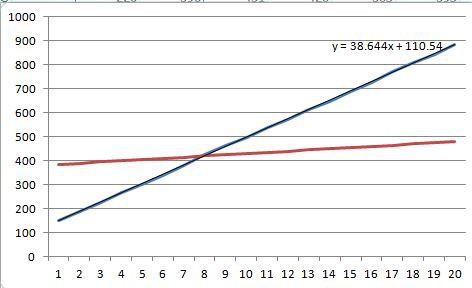
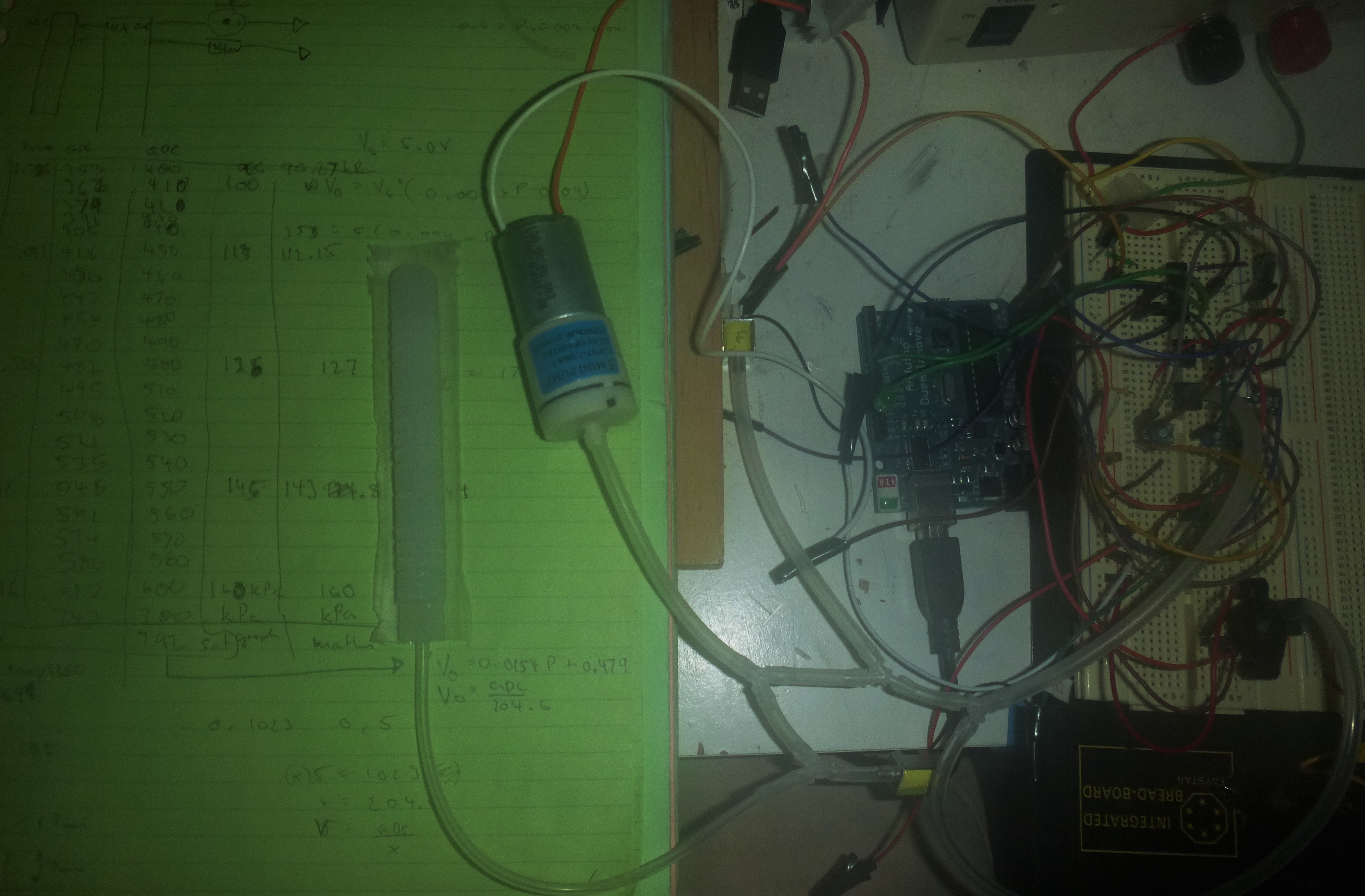
Coordinating the control of the pneumatic circuit used a MPX4250 to calibrate and select the gain resistor. The method used was to link the sensors and write the analogue values through 20 increment by 5 relative to the MPX4250. This also gives a linear equation for future reference.
![]()
![]()
-
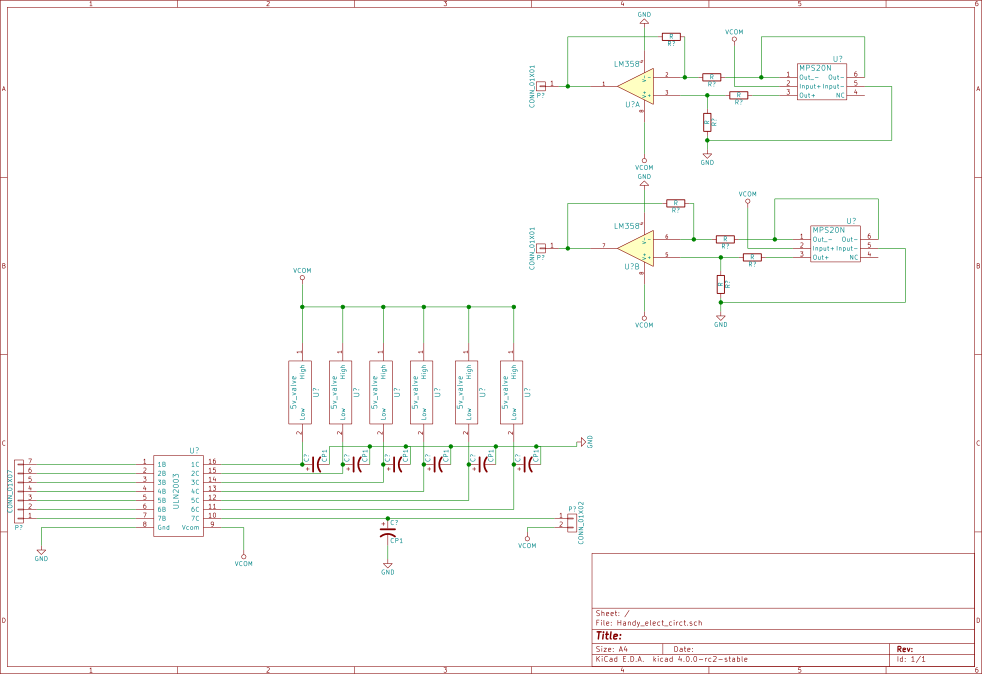
Control electronics_1 - schematic
10/07/2016 at 07:06 • 0 commentsThe control electronics schematic for the motor, valves and pressure sensor.
![]()
-
Control electronics_1
10/05/2016 at 12:42 • 0 commentsThe initial software and hardware for the control of the hand has been done. It basically doesn't blow the fingers up. A calibration test was done to understand the readings of the sensor to activate a comfortable amount of pressure in the actuators. Then a basic control sketch was written and tested with the intention of this to be the basis for a more complex control regime.
![]()
![]()
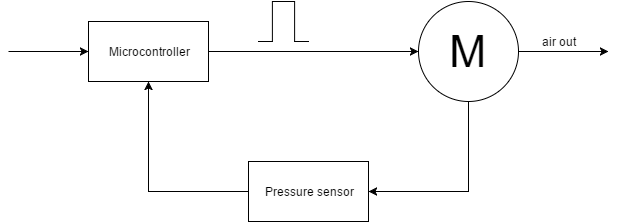
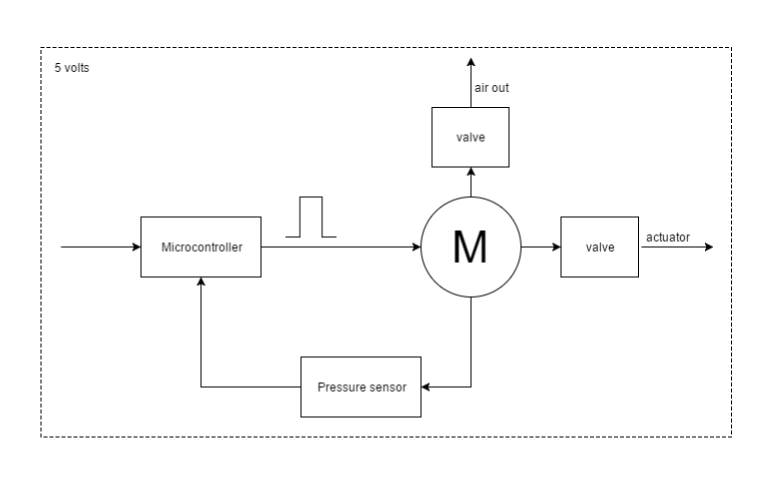
The function diagram represents the components with the valve in open loop and the sensor in closed loop. Using pwm to control the motor pump will enable the feedback sensor to proportionally change the output of the motor. There probably not a necessity to implement a full PID control and currently just the P will do, but the possibility is there for the future.
The whole system runs off a 5 volt power supply, as shown in the video this is definitely enough and will probably need to be carefully regulated so as to not blow a finger.
-
Grasping
10/03/2016 at 07:35 • 0 commentsJust a short log with a video of the hand grasping at a suncream container. It doesn't pick the container up, with my thinking if a put the finger pads on it have instead of the ABS exoskeleton just slipping over the surface.
Playing around with what this hand can pickup and especially because it is a soft hand it should be capable of grasping different/oddly shaped objects.
-
Beginning of the control electronics
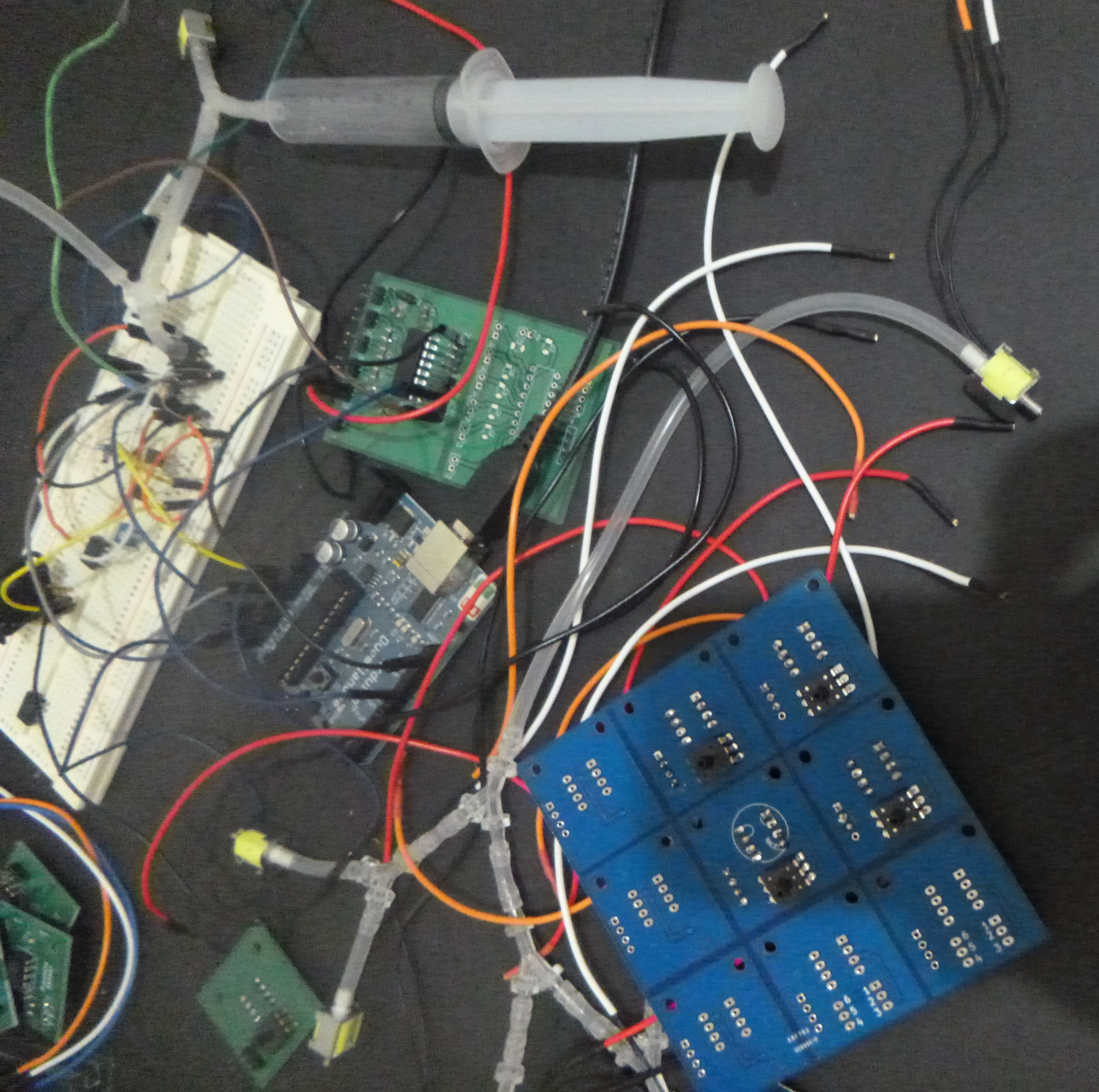
10/02/2016 at 11:47 • 0 commentsAfter the physical hand is completed it needs a proper control interface. This started a few months ago sourcing appropriate components like pump, valves, connectors and pressure sensors. These have now been bread boarded and tested on a test finger.
![]()
A background on the choices made here has largely to do with cost. A compressed CO2 setup is significantly more costly than the 6V pump and 5V values. The pressure regulation is a issue with the CO2 were as the pump's pressure is regulated via a PWM signal with a pressure sensor in feedback, however there is no reason that the hand cannot be controlled via pressurized CO2.
For those playing along at home, the table in the picture was created to configure and calibrate the inexpensive MPS20N0040D-S pressure sensor with a MPX4250AP that has a know pressure to voltage output, but is significantly more expensive. This is in spite of the additional circuitry and amplification. The issue was that the MPS20N0040D-S is essentially a voltage divider with two output that require a difference amplifier, but it was also found that this was enough without additional amplification, the difficult to see diagram at the bottom is the sensor circuit equivalent.
![]() The values and pump are controlled by a high current Darlington transistor array ULN2003A linked to an Arduino.
The values and pump are controlled by a high current Darlington transistor array ULN2003A linked to an Arduino. -
Assembly of the mechanics of the hand.
09/30/2016 at 15:15 • 0 commentsGaining the most mechanical function out of the finger required the silicone casts for the actuators to be push to the limits of my current resources. Currently these include a 3D printer and your basic two part silicone. The major problem has been getting, the perennial casters problem, bubbles in the otherwise justifiable 1mm wall thickness. This meant multiple casts of the same actuator and sometimes a repair. Finally, there is the necessary appendages to form a grip.
![]()
![]()
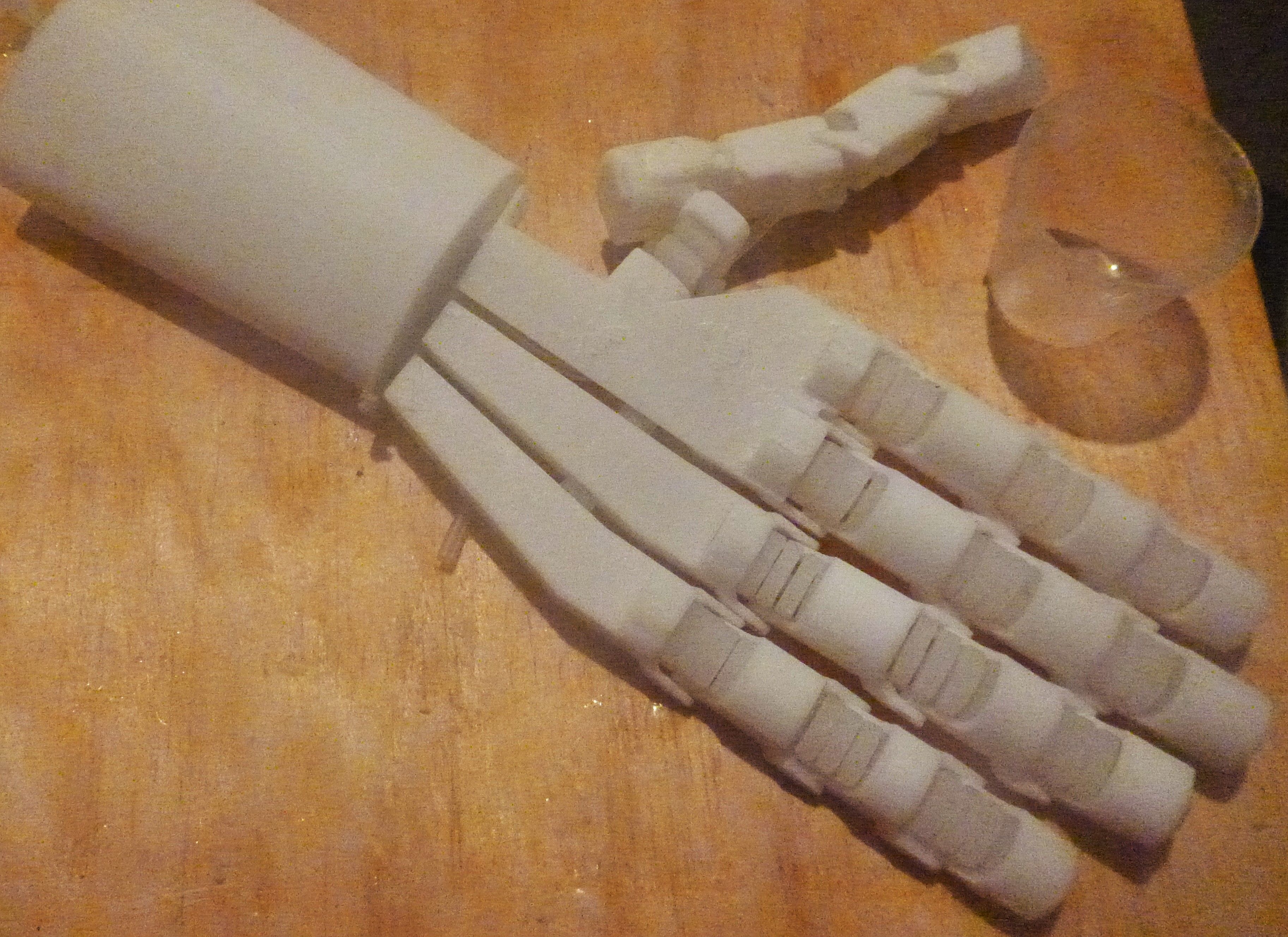
As it is a soft (robotic) hand it is compliant with the environment, which includes gravity. The picture below is a picture of it in a "relaxed" state. When a vacuum is applied the fingers stiffen even bend back on itself, almost what some can do and have a concave back.
![]()
Before using electronics, a pneumatic pump and values to active the hand was tested to see if it works first and then the effectiveness. However, the size of the syringe the local chemist sells is not really capable of activate three fingers to illustrate a full/partial grip, but good enough for a basic look. So the following documents the basic functions of the mechanics of the hand. More time spent maybe justifiable to create better videos, but the emphasis has been on the build making the projects assumption physically successful.
Finally this is a view of the thumb mechanism, which is currently got a 3D printed insert for a little bit of stability and is not activate to the pressure required to achieve full function, but I think it give the idea.
-
Thumb joint and finger base
09/26/2016 at 12:25 • 0 commentsThe thumb is a clearly an important component of hand function the two fingers and thumb picture below shows an early solution. It revealed that there requires an angle on the apposing joint and the third joint is a difficult to straighten from being parallel to the fingers.
So the following two pictures show the angle and joint in detail. The two hinged joint, carried from earlier, is less restrictive and was able to provide a little more strength here.![]()
![]()
![]()
The actuator for the thumb base joint, below, is large and provides the force to keep it stable, using the commonly used, for this project, flexure equation
![]()
![]()
Most of the CAD model has been completed for this stage of the project and requires construction.
![]()
![]()
-
Actuators and its exoskeleton
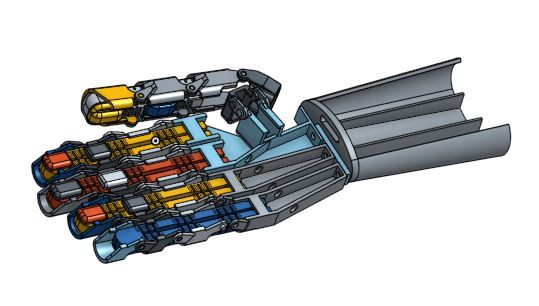
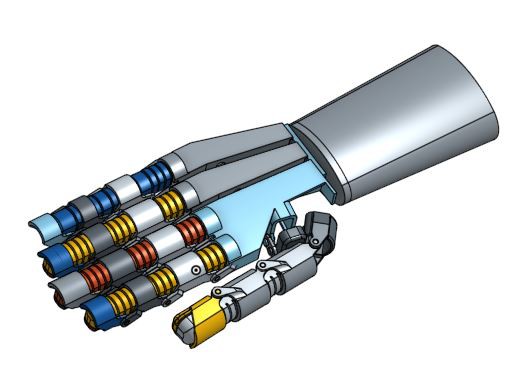
09/18/2016 at 12:37 • 0 commentsThis project started with the construction of a finger with the idea that I will work my way up the hand until it is a functional prosthesis or humanoid hand. The hand is to be constructed out of 3D printed exo-skeleton and silicone cast fingers all pneumatically controlled. This log documents how the finger has been created, but not all the many iterations before arriving at a reasonable close finish, refinement is still possible.
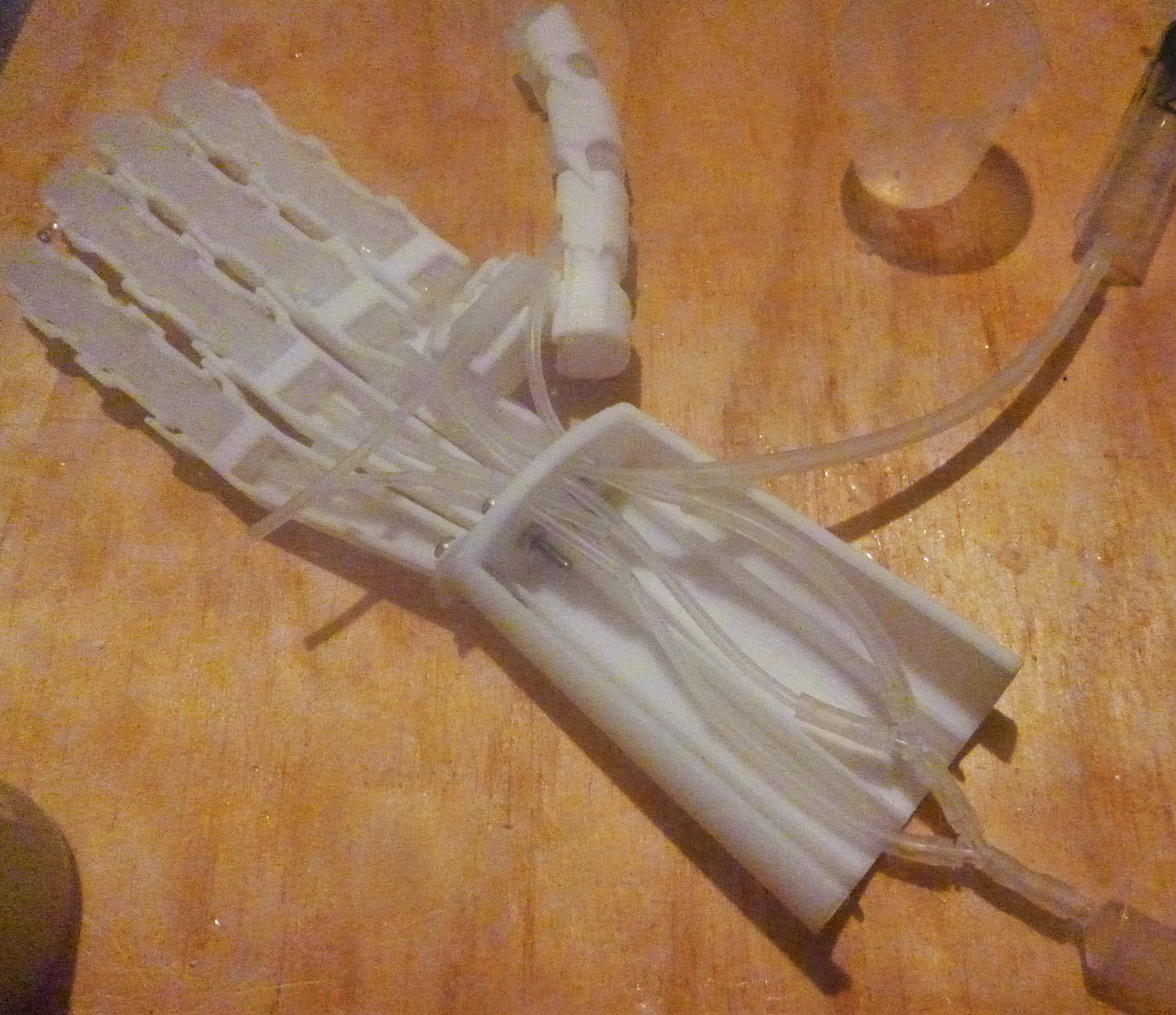
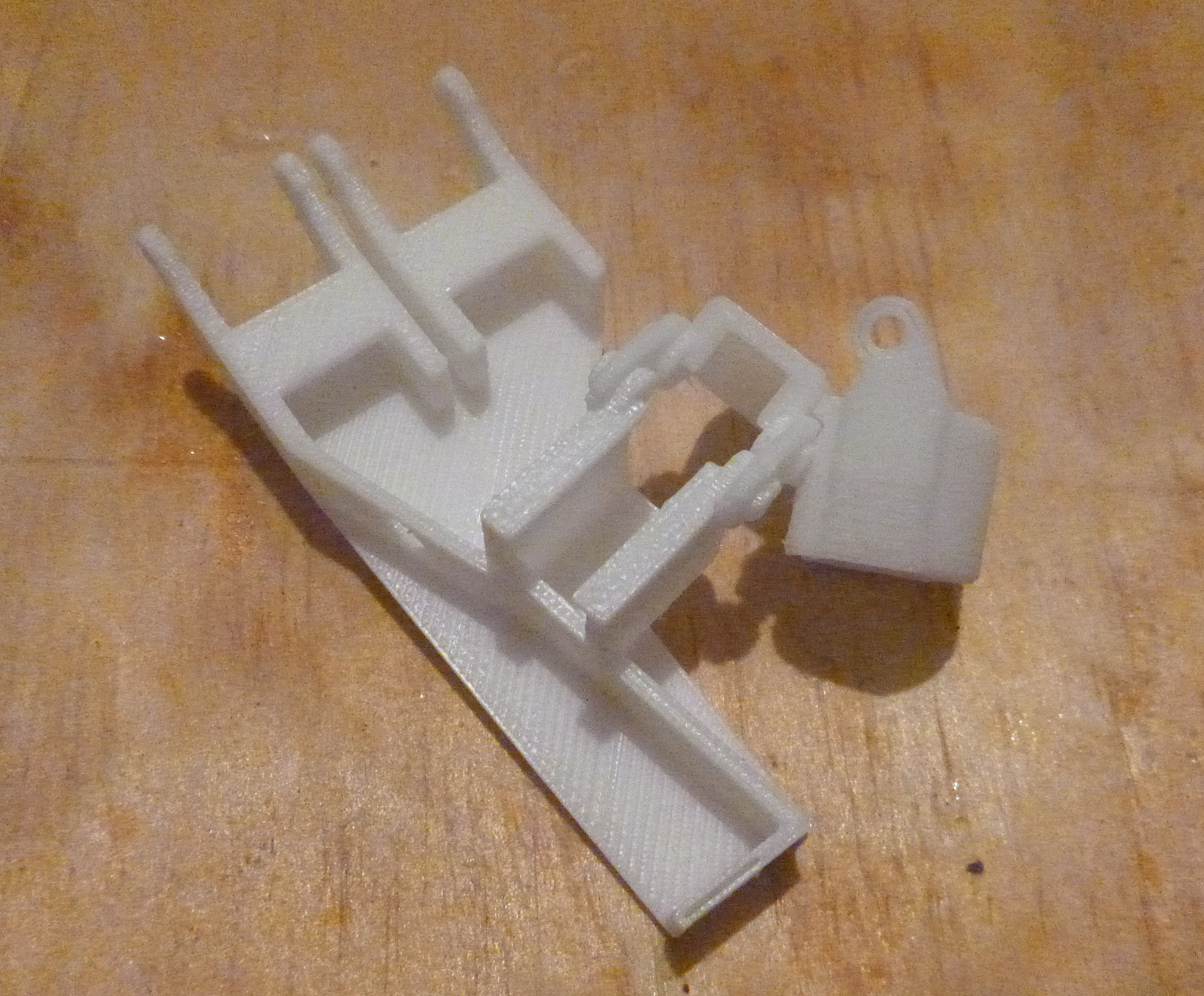
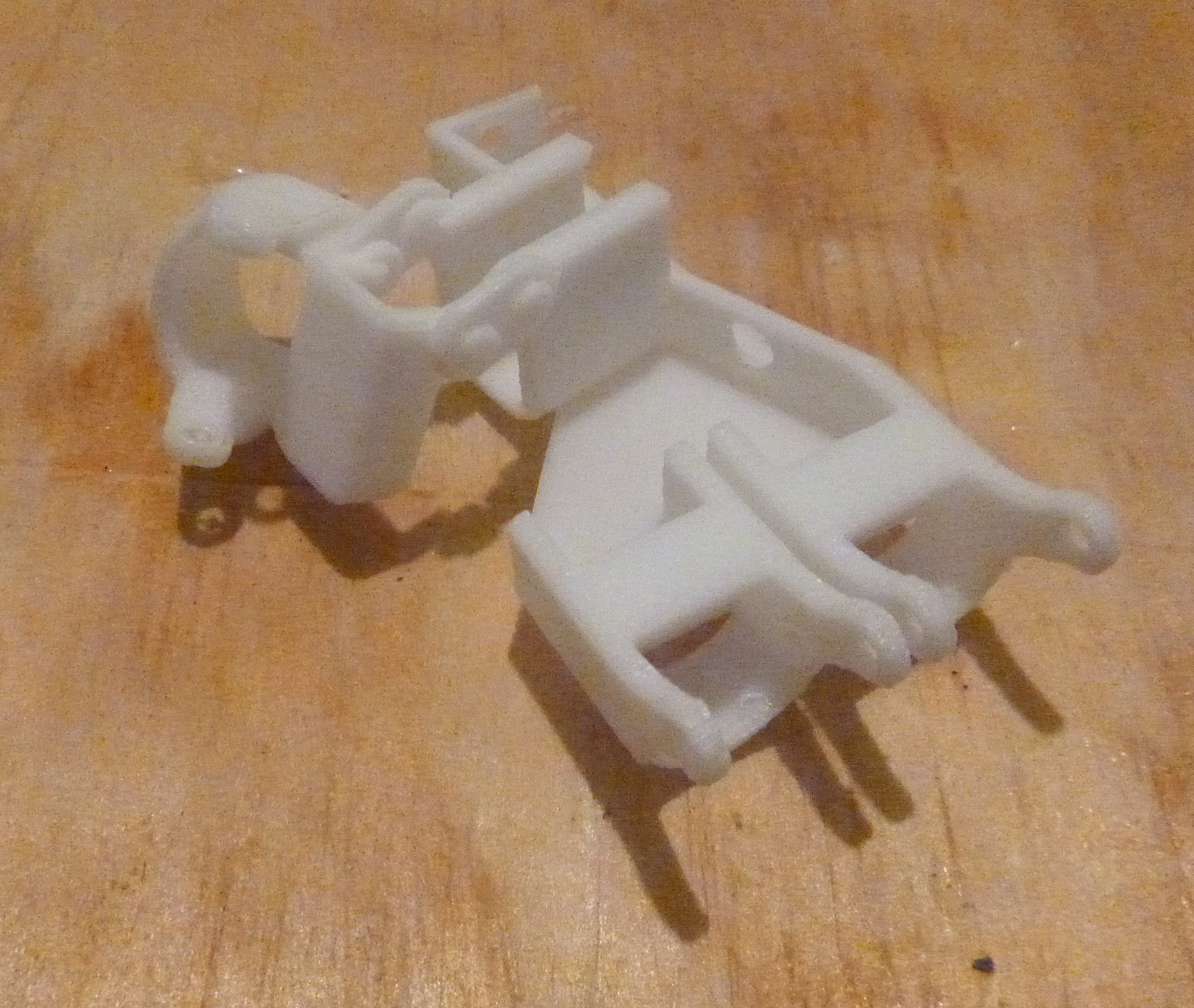
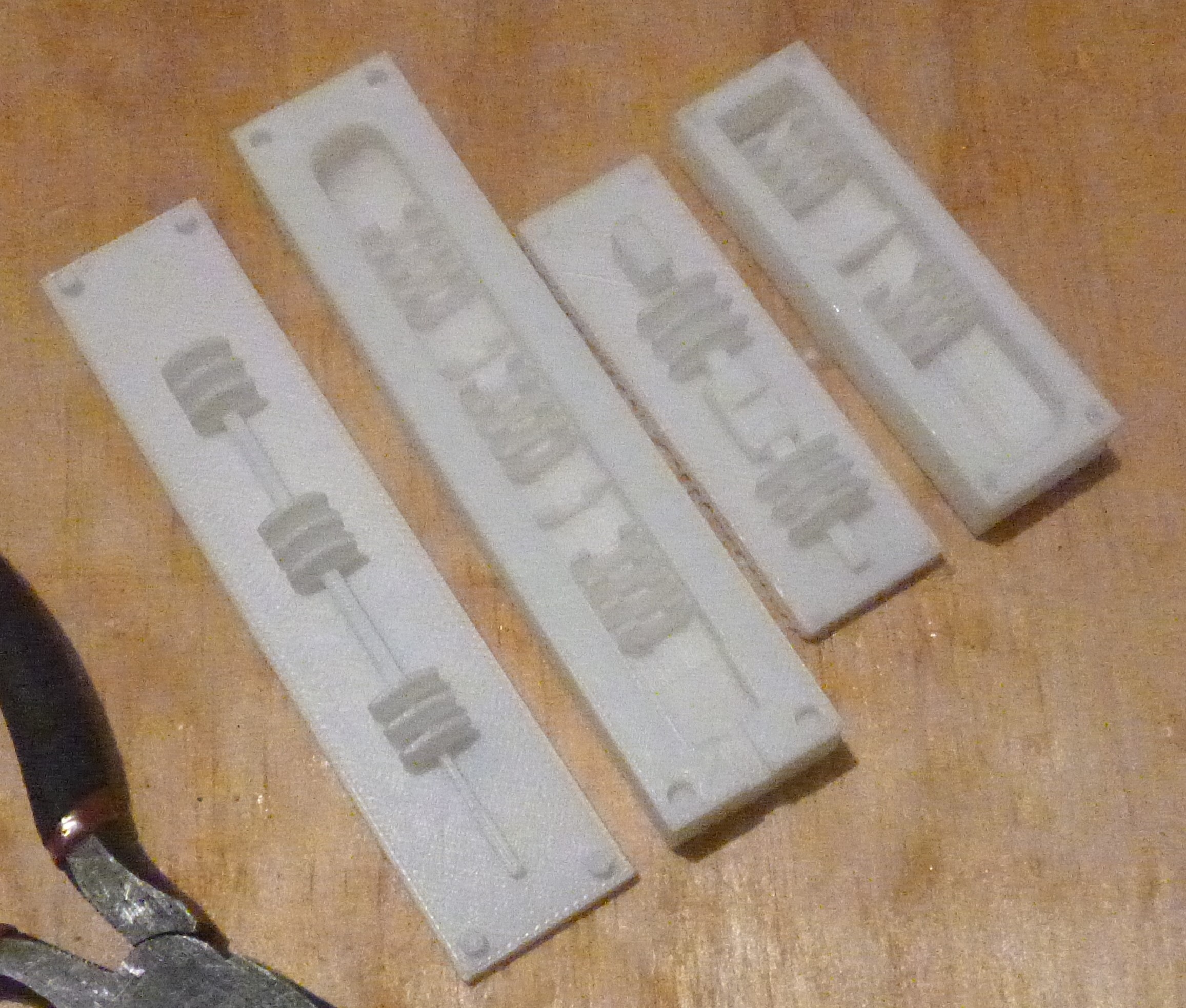
The actuators for a soft robot/prosthetic hand are constructed out of silicone casts from 3D printed molds. The thumb and pointer/ring molds are pictured below with the actuation cavity created by the top mold being inserted into the bottom section located via location dimples.
![Pointer and Thumb top and bottom molds]()
![]()
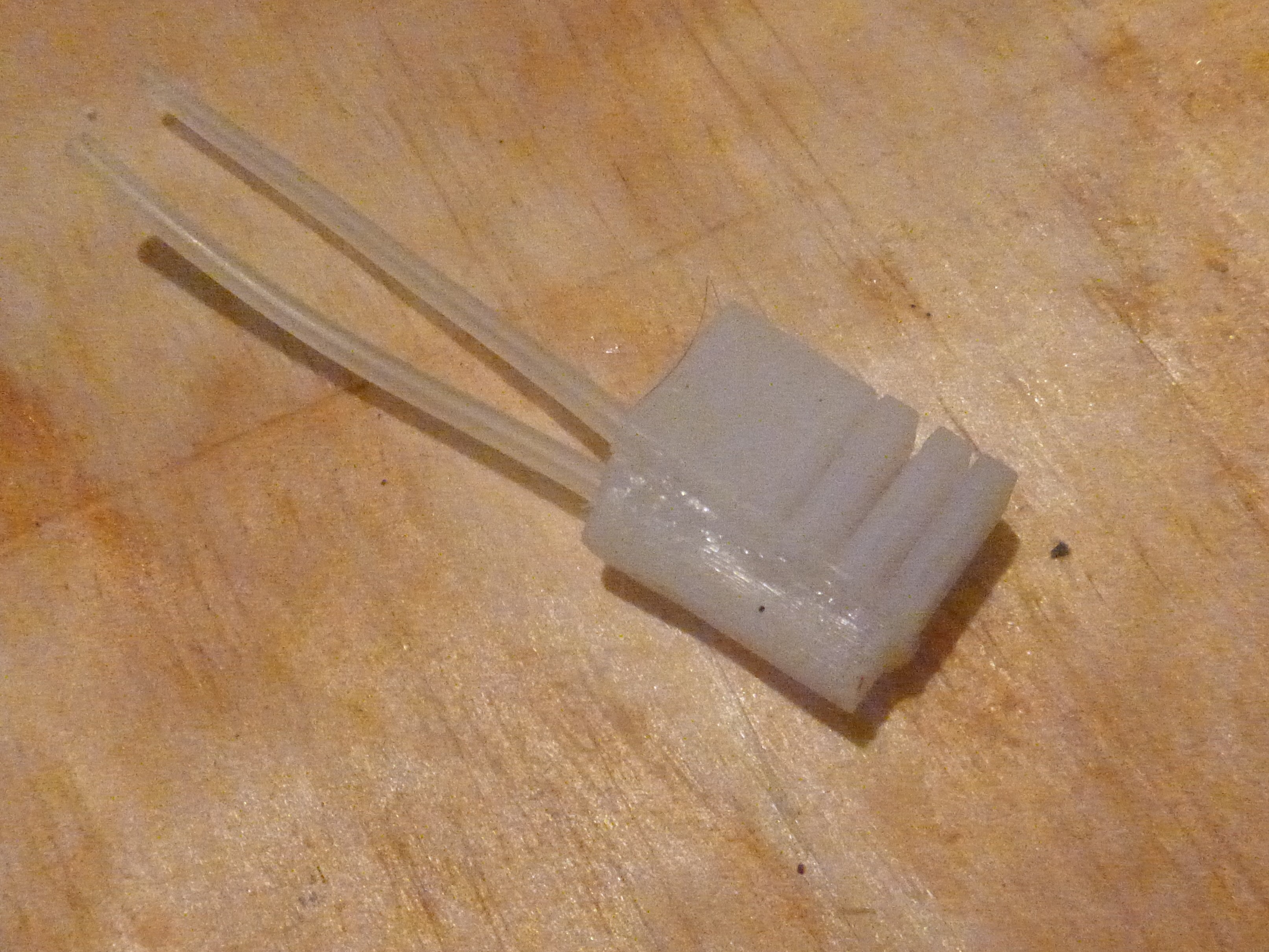
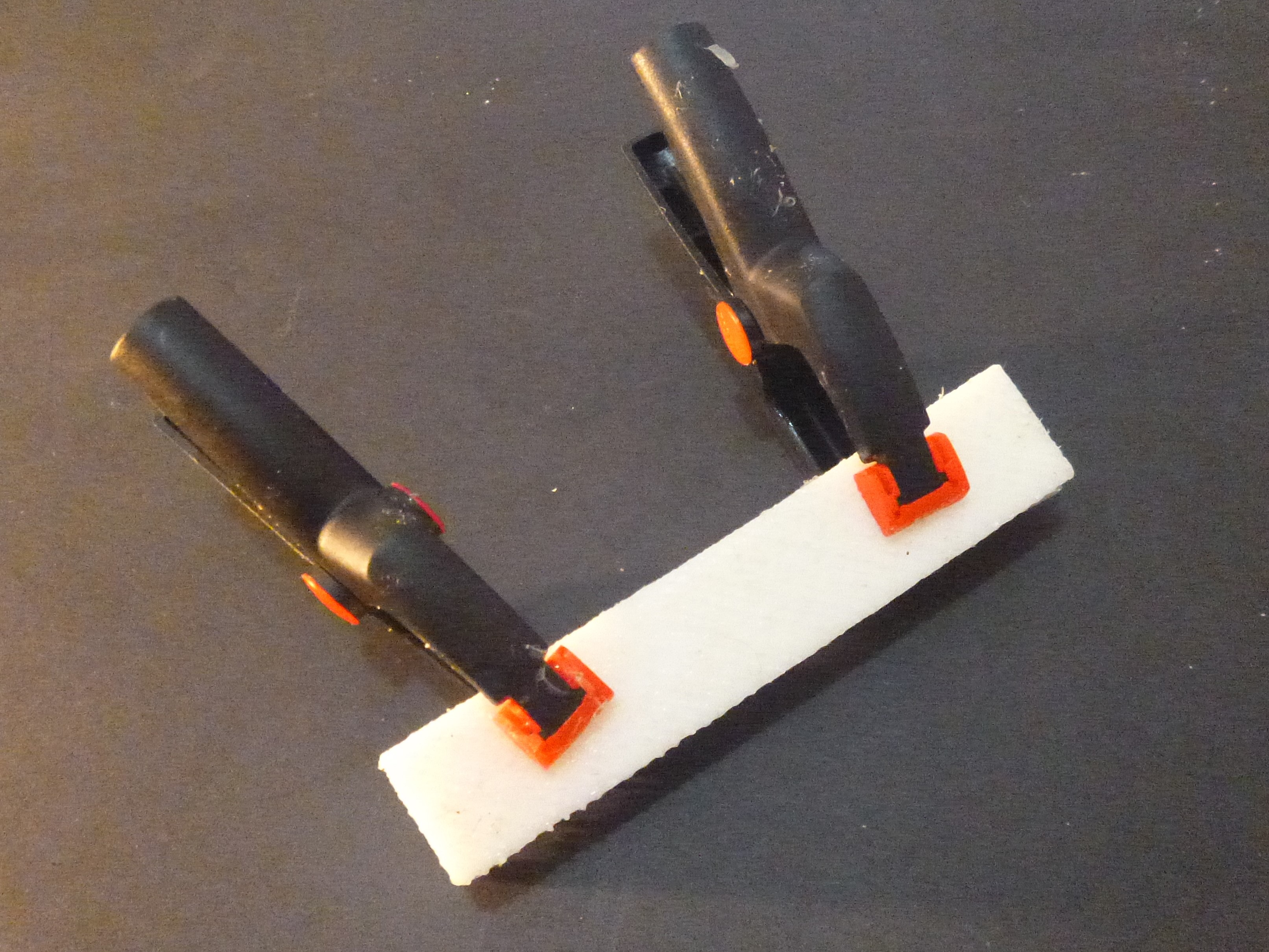
After the mold has being held together until the two part silicone has set a thin, 0.5mm 50A shore hardness strip of silicone is glued by more two part silicone or by specific glue. The harder-than-finger silicone strip acts like a flexure, reducing the bending radii and pressure required to bend the finger.
![]()
![]()
![Exoskeleton that the silicone finger sits in.]()
![]()
Above is the thumb with pads on the underside, which will be implemented on all the other fingers.
Soft-Handy
This project is an exploration of a pneumatic artificial hand that could be used for a robot or as a prosthesis.