 jaromir.sukuba
jaromir.sukubaWhat is this?
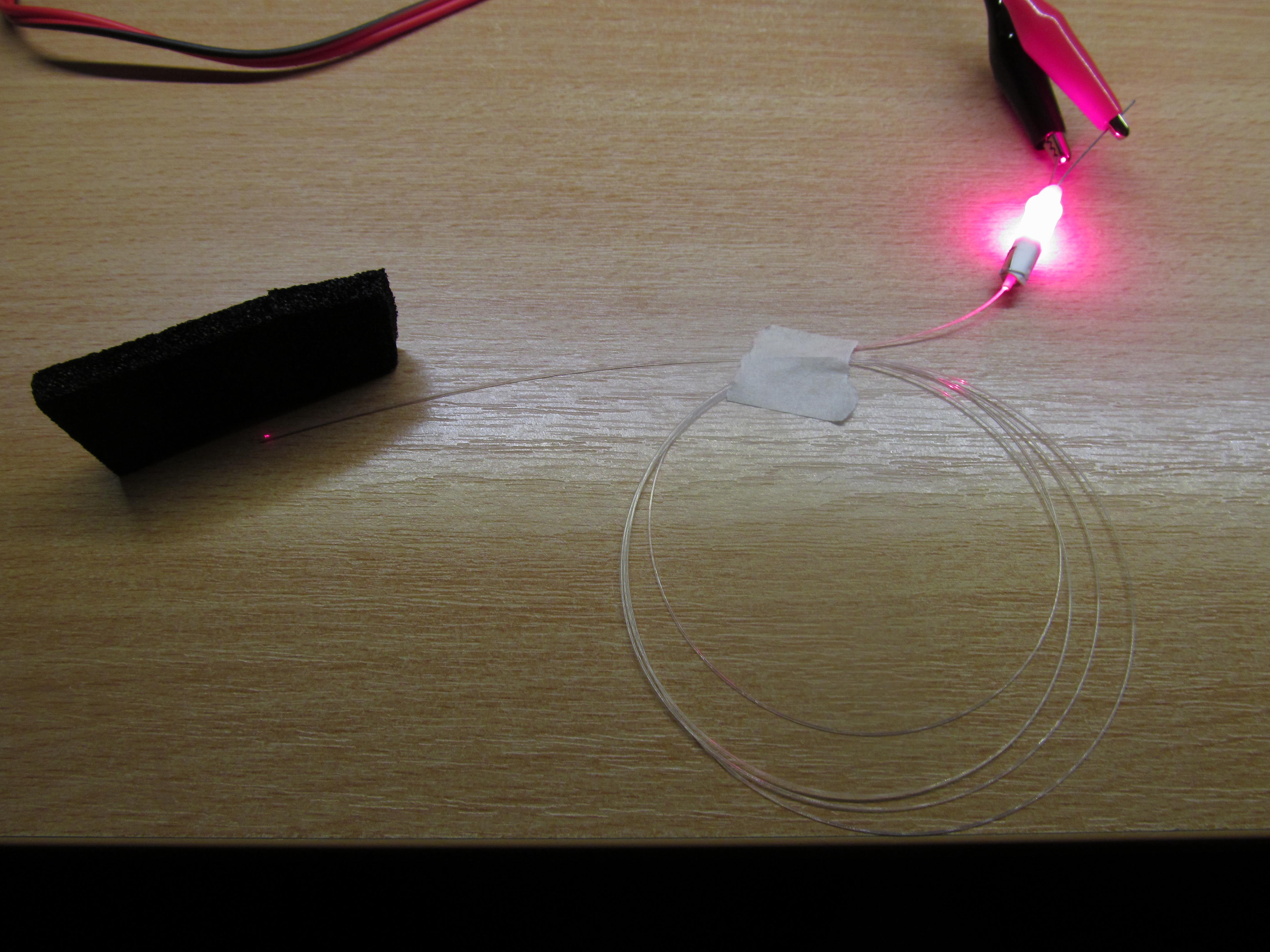
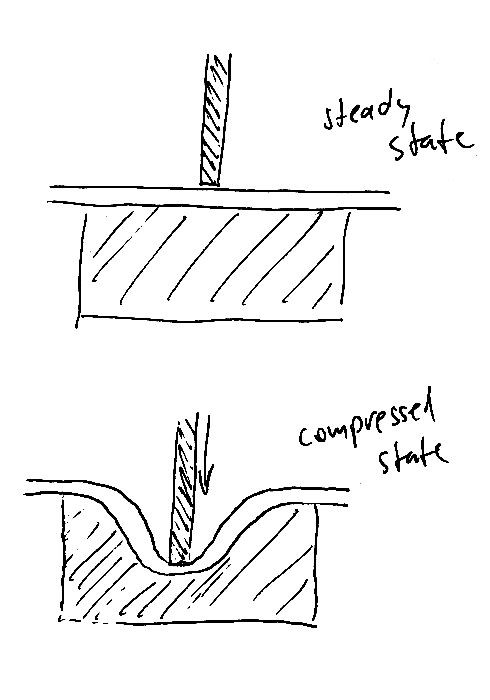
This is implementation of fiber optic sensors (FOS), ie. sensors where are no electronics at place, just optic fiber and some passive mechanical structures. FOS can be made to measure many physical quantities, like force, pressure, weight, temperature, vibrations.
Why bother, when we have electric sensors for this?
Electric sensors are great for a lot of applications, but there are environments, where those aren't usable - like measurement of temperature inside power transformer, strain on high voltage lines - and electric sensors would be upset by this conditions. Also, there are examples where voltage in those sensors - though not being particularly high - can be potentially dangerous for the environment, like danger of sparking around explosive materials.
But you need some electronics with FOS, right?
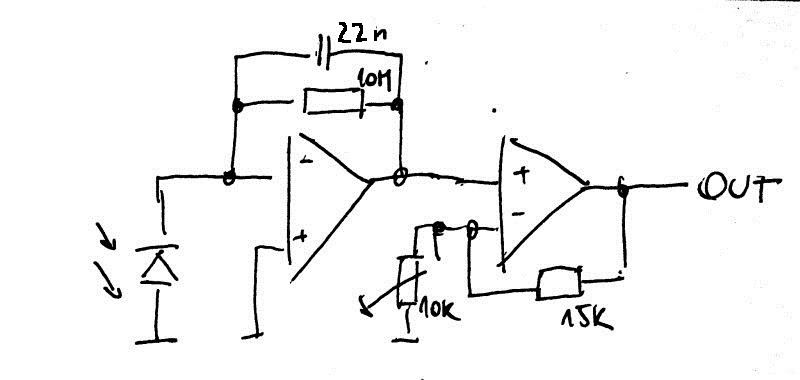
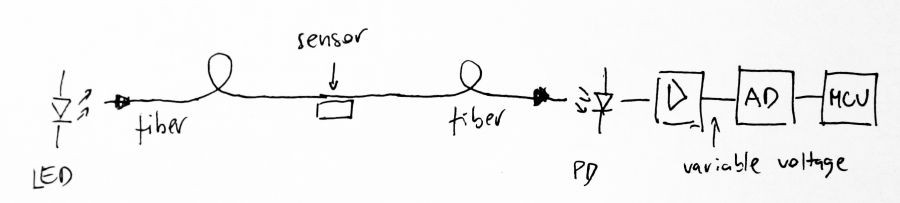
Yes, usually you need to emit some light into the fiber and also look at the sensors response, with photodiode, amplifiers, ADC etc. The point is that those could be fairly far away from measured point, with potentially hostile environment and signal is transferred by optic fiber. This has also another implied advantage - the 'fairly far away' can be like hundreds of meter, perhaps kilometers. In comparison with electronic sensors - there is usually problem to have electronic sensors that far away.
That looks complicated and expensive
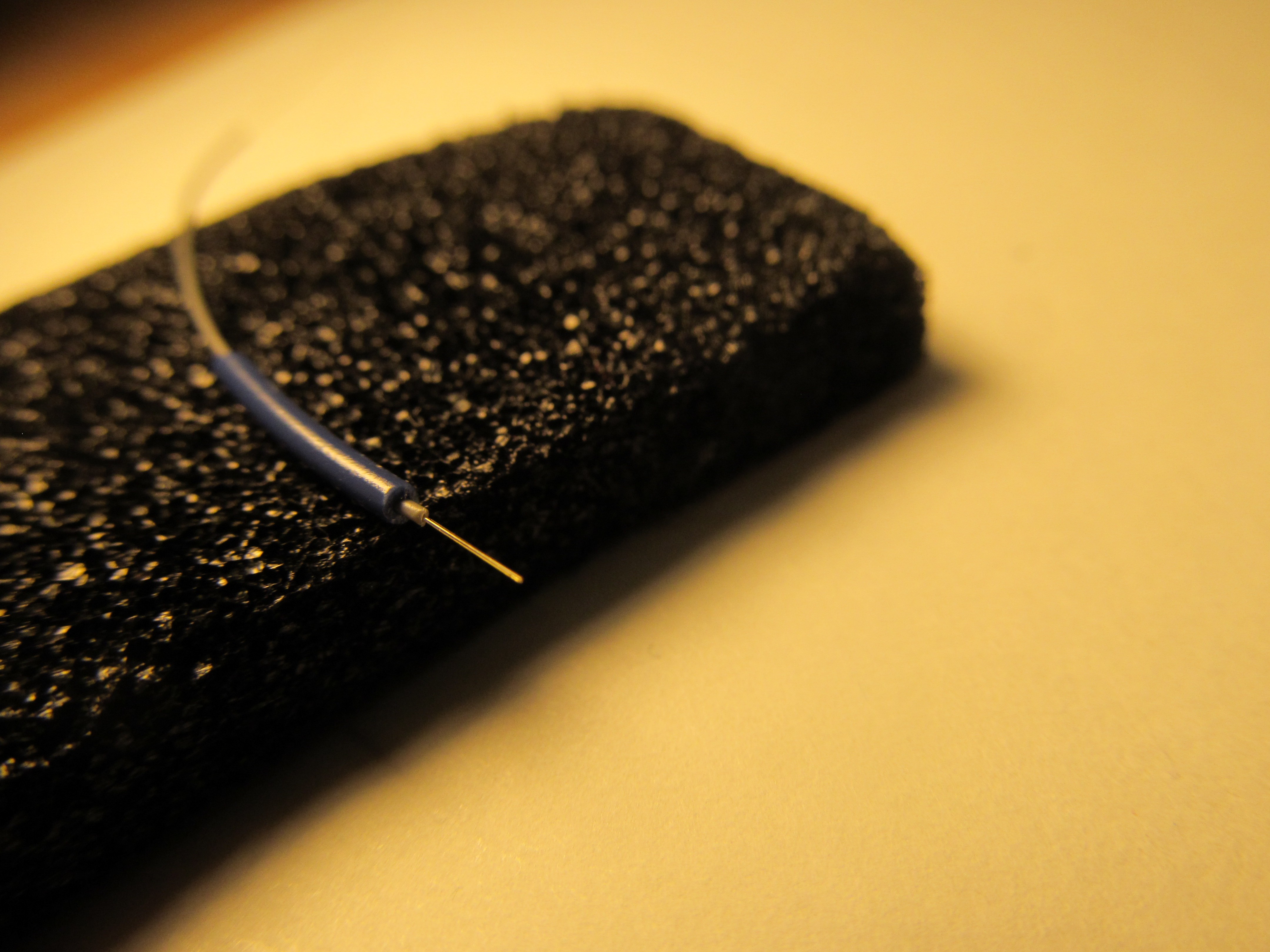
Not that much, really. Multimode fiber can be bought for 0,15E/m, or at local telecom company for free as waste material, the rest is just basic electronic components available at your usual supplier. Two channel sensor similar to what I did can be made for 5-10USD, if you use cheap arduino compatible board. No other special tools are needed. All my knowledge is here, sources are on github, I used FOSS to build this.
In comparison, professional FOS solutions are at price at least two orders of magnitude higher.
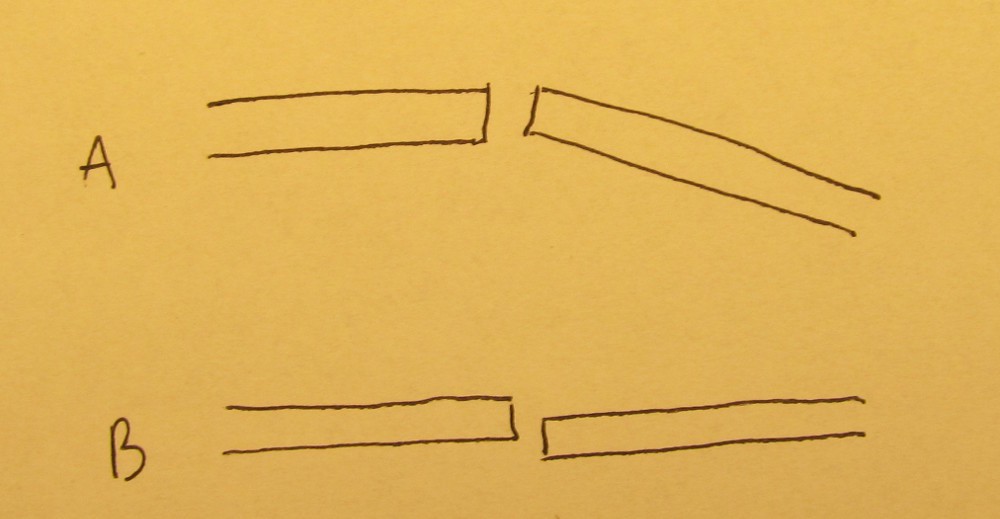


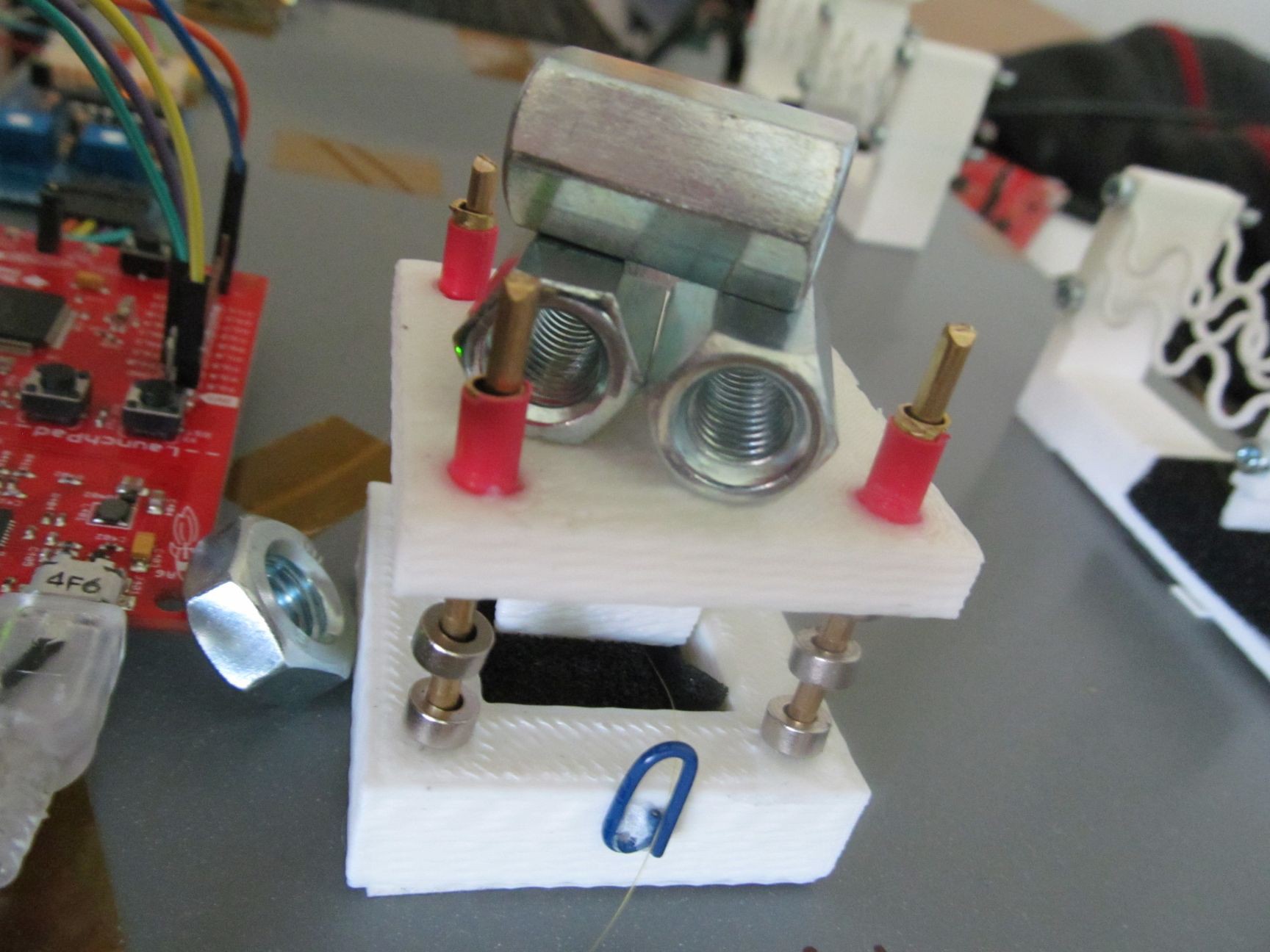
 This sensor takes advantage of flexibility of plastic to allow pushing rod movement.
This sensor takes advantage of flexibility of plastic to allow pushing rod movement.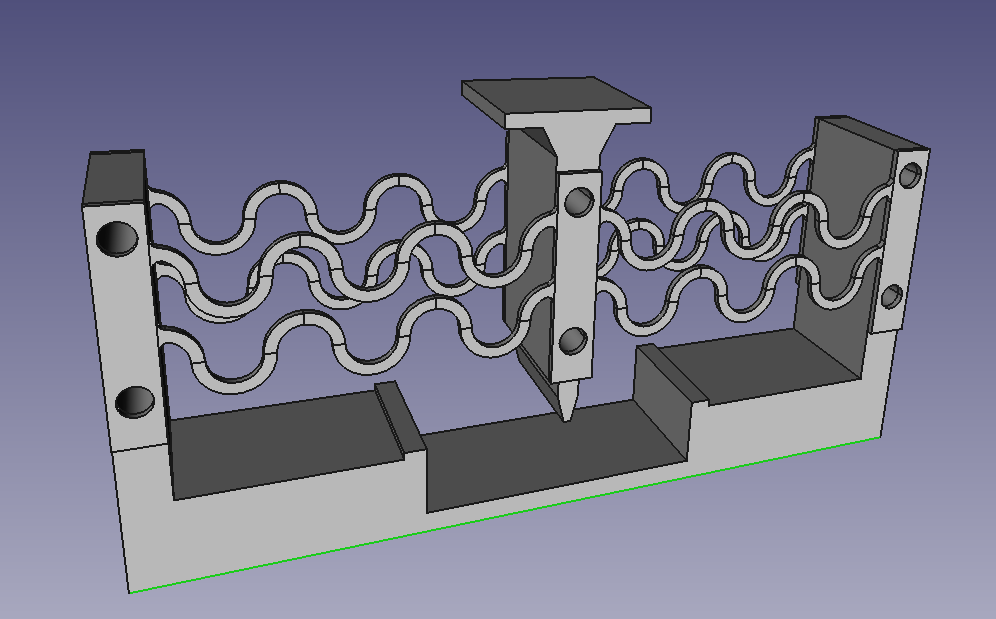 or in slightly different view
or in slightly different view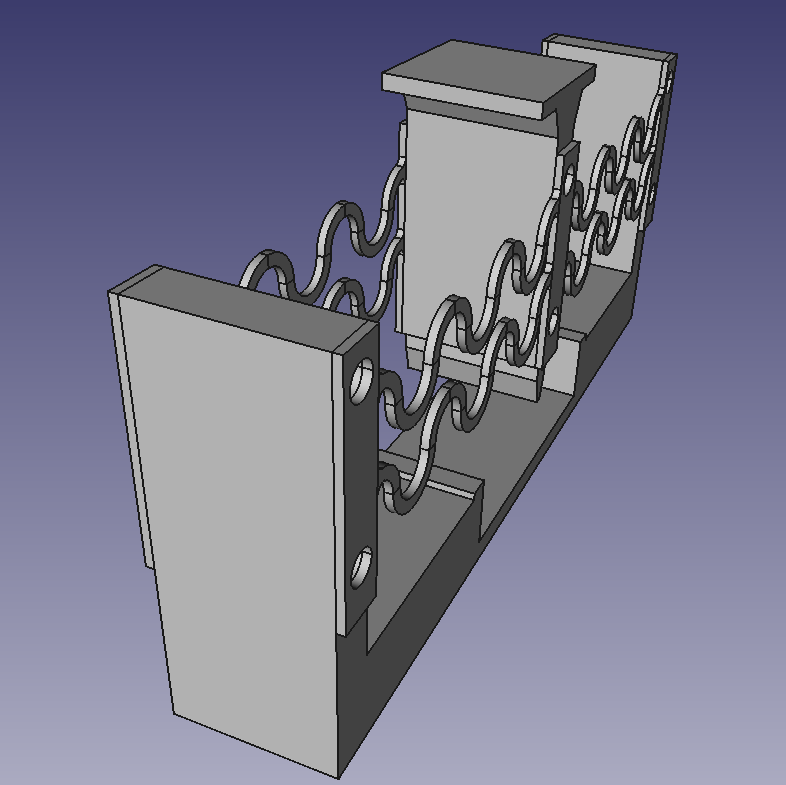 It's made of three different kinds of 3D printed parts, in order to keep it simple and printable on average home printer.
It's made of three different kinds of 3D printed parts, in order to keep it simple and printable on average home printer.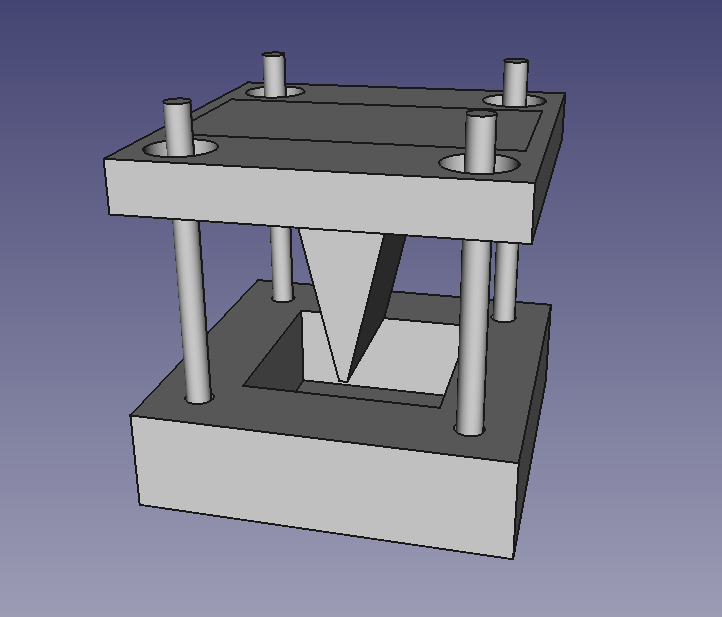 Suspension is to be added on the four pillars, leading upper part with pushing rod against flexible material in empty space in bottom part.
Suspension is to be added on the four pillars, leading upper part with pushing rod against flexible material in empty space in bottom part. I only had 2,5mm OD brass bar, because that was what I had available. The magnets do have 3,2mm ID, so 3mm bar would be better fit.
I only had 2,5mm OD brass bar, because that was what I had available. The magnets do have 3,2mm ID, so 3mm bar would be better fit.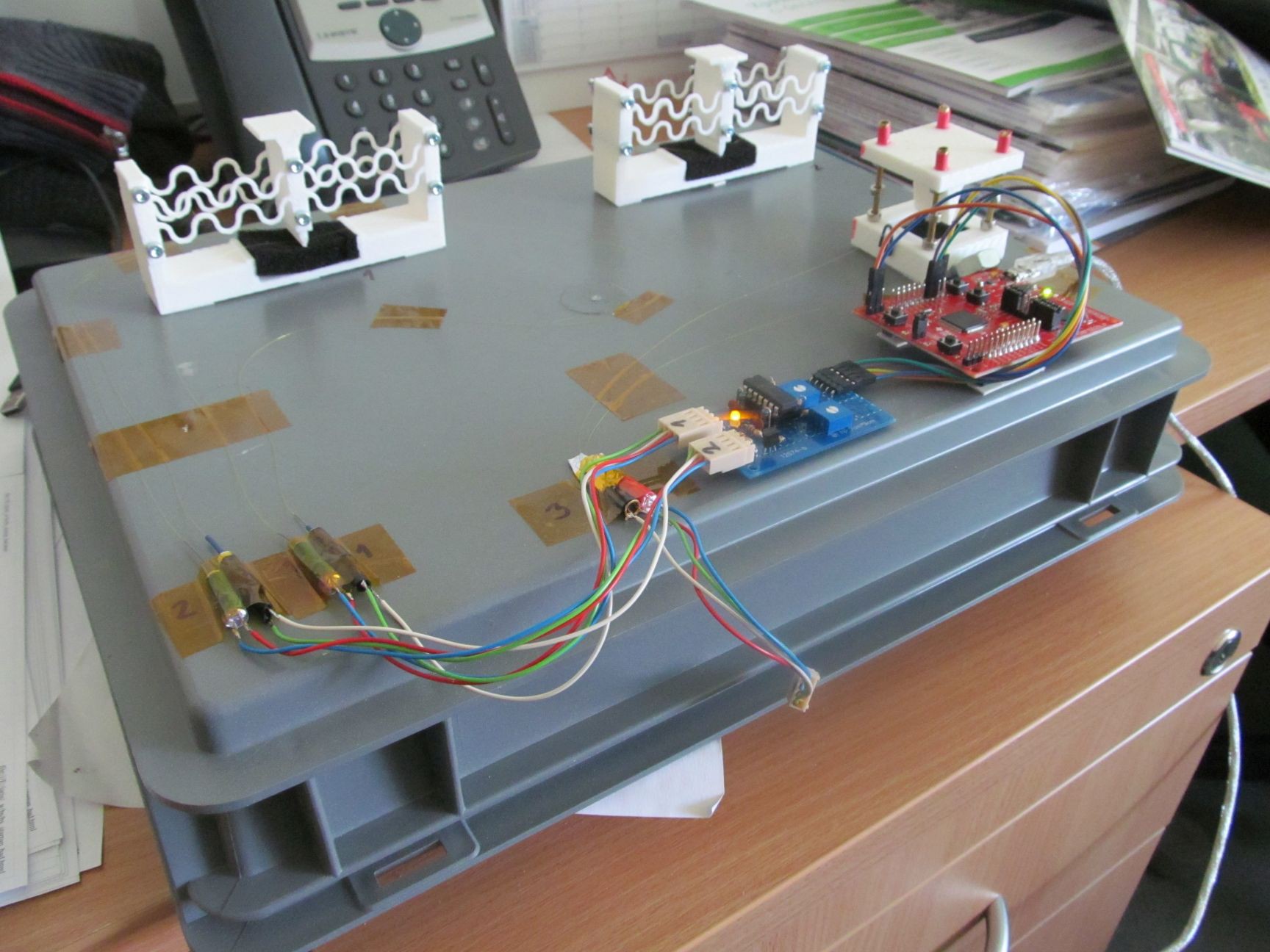 Fibers and opto-electronic parts are secured by adhesive tape, so I can move this project with no worry of broken fibers. Detail of amplifier board and MSP430F5529 launchpad.
Fibers and opto-electronic parts are secured by adhesive tape, so I can move this project with no worry of broken fibers. Detail of amplifier board and MSP430F5529 launchpad. 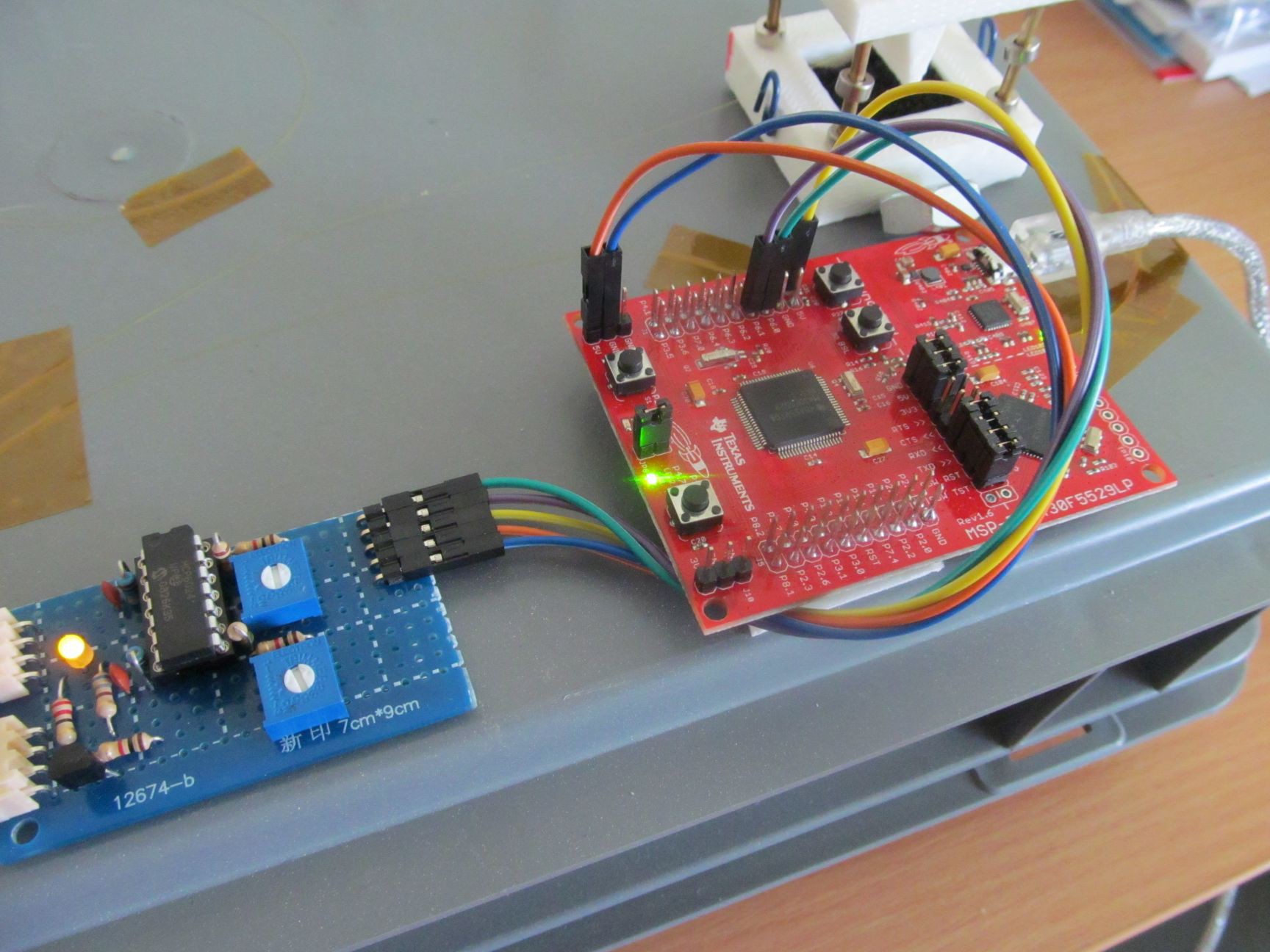 I decided to use MSP430 just for the sake of exploring something new.
I decided to use MSP430 just for the sake of exploring something new.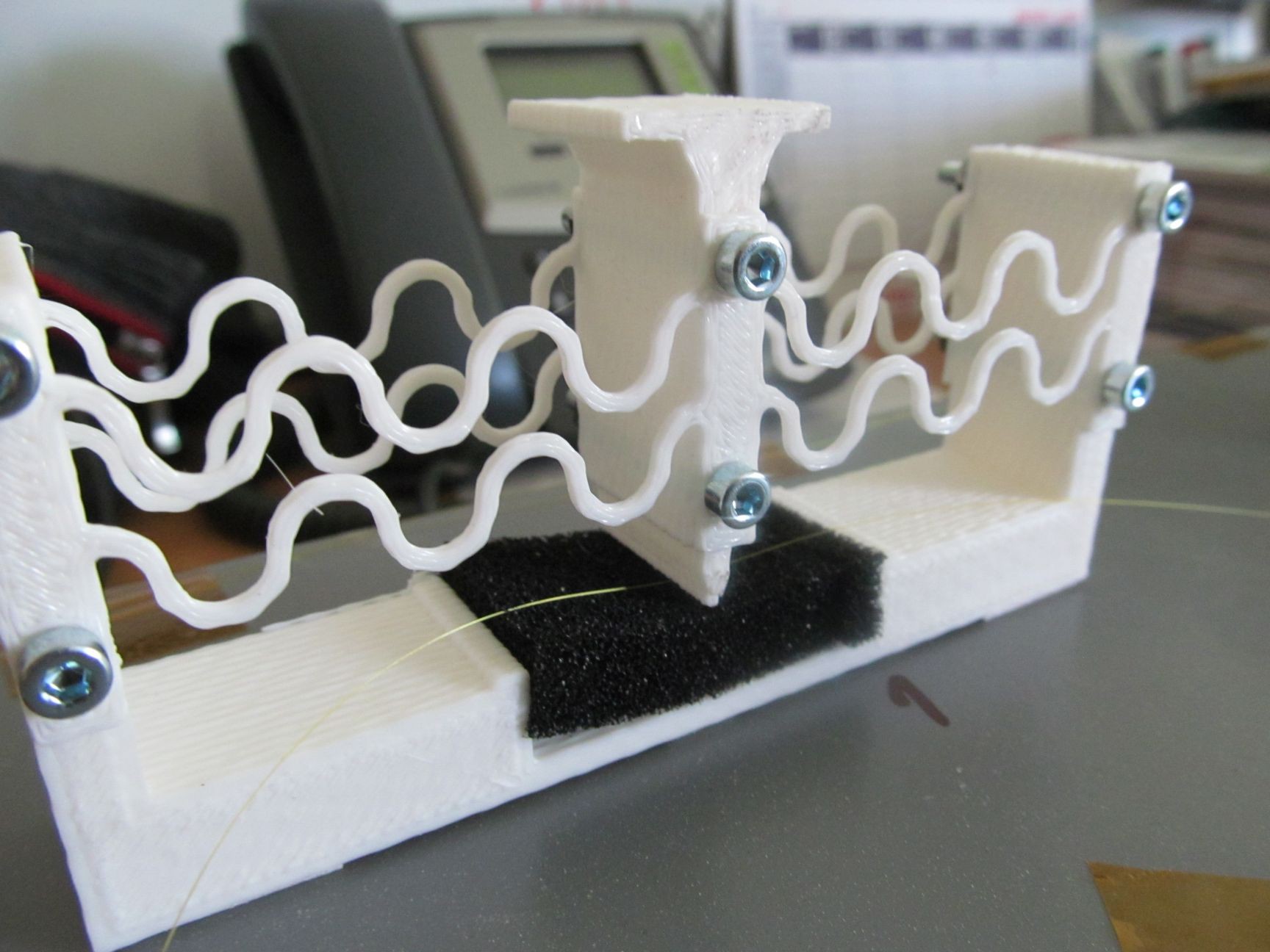 ...and fully loaded (~400g)
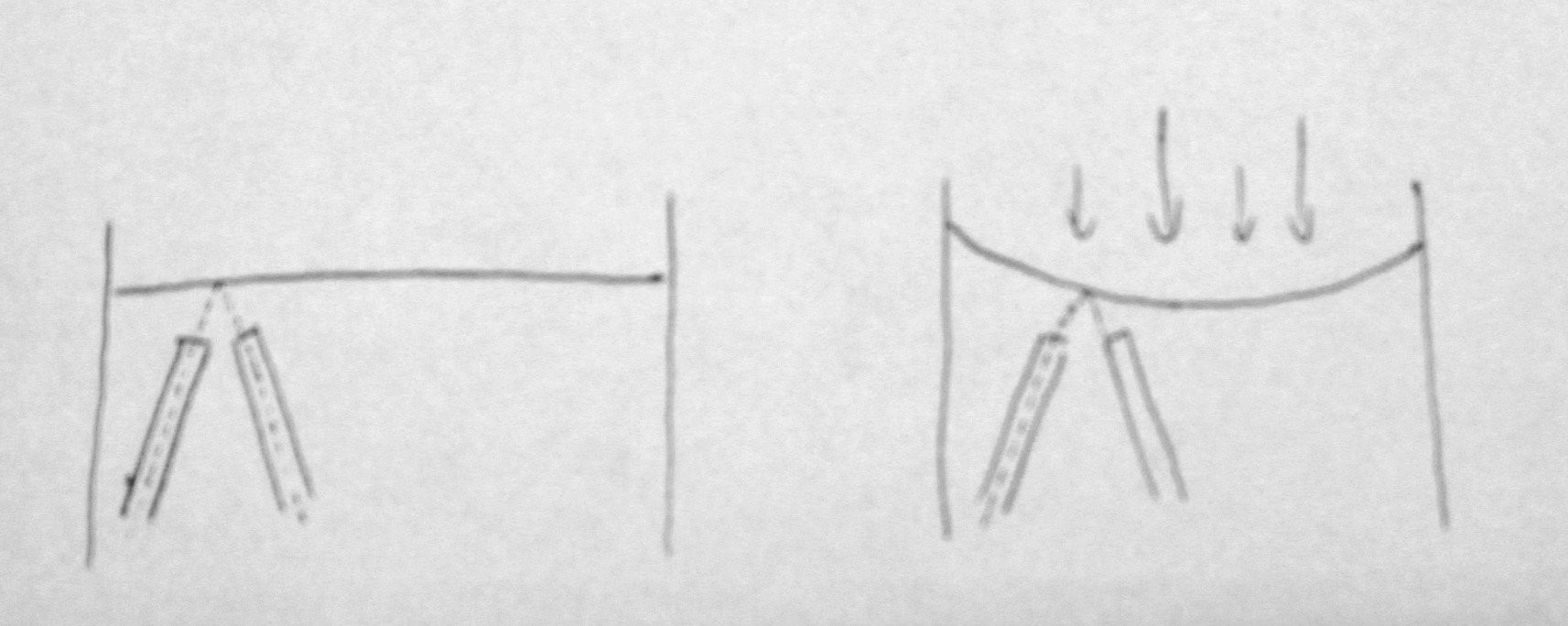
...and fully loaded (~400g) The suspended sensor. was tortured, too. Only 50g for this one, though.
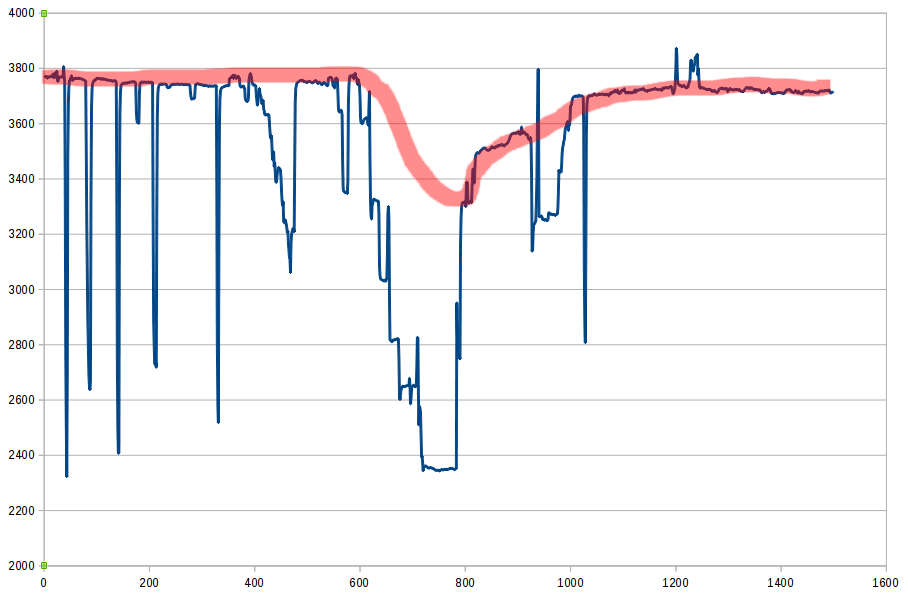
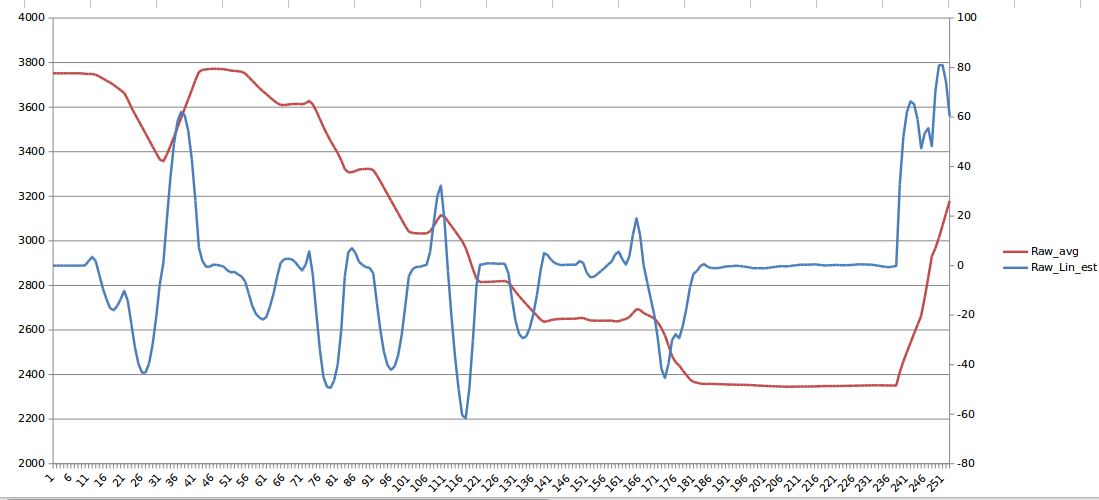
The suspended sensor. was tortured, too. Only 50g for this one, though.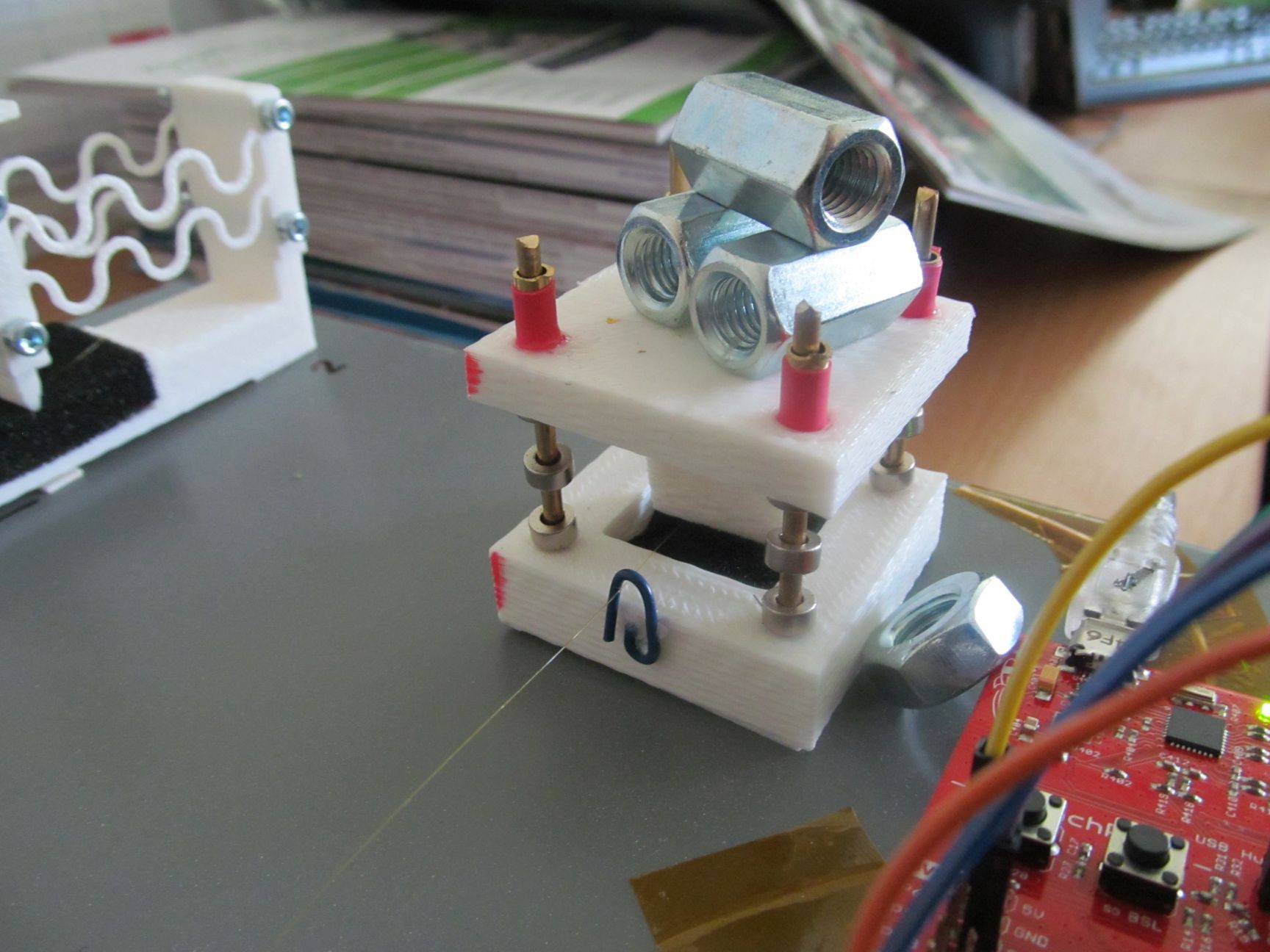 No fiber optic sensors were harmed during making of this project. In future project log, I'll take a look at results and how I measured it.
No fiber optic sensors were harmed during making of this project. In future project log, I'll take a look at results and how I measured it.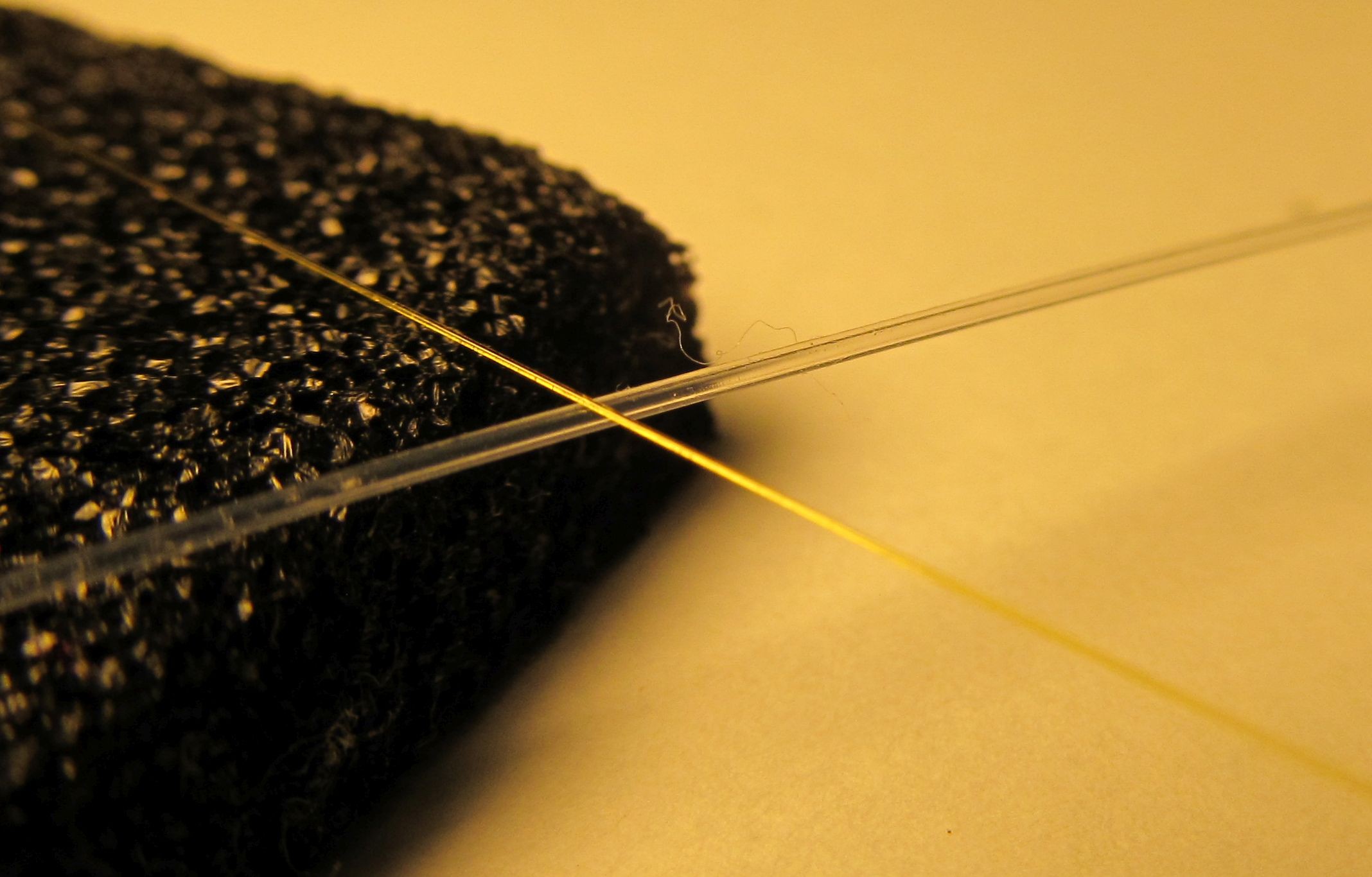




 Est
Est

 DeepSOIC
DeepSOIC
 Minimum Effective Dose
Minimum Effective Dose