Note: this just got a major re-write.
The heart of the MultiSpork (and the inspiration for it) is the new Maxim MAX11300, which is sort of a magical little chip. It has twenty I/O lines, each of which can be an ADC, a DAC, or a GPIO line. It can do these functions at voltages ranging from -10V to +10V. It speaks SPI, so it's pretty easy to integrate to the rest of the world. Each channel has diodes to the +10V and -10V rails along with a PTC fuse to prevent the diodes from drawing too much current. Maximum speed is 400 ksps, so it's not a speed demon, but it's fast enough for most robotics applications.
The brains of the operation as well as the connection to the outside world is a TI CC3200. The ARM Cortex-M4 provides plenty of grunt for processing and plenty of bandwidth for offloading data. It can also act as an access point and use SmartConfig, both of which provide very straightforward methods of configuration.
The Energia project has gotten good enough that it's a reasonable candidate for the development environment for this project. One of the coolest recent additions is a TI-sourced RTOS, which provides the ability to run multiple sketches concurrently. This pretty much makes everything easy.
Power is provided by a LiPo battery, which can be recharged by the USB port. Programming is through a USB bootloader. An SD card provides storage for acquiring lots and lots of data.
The MAX11300 has somewhat unpleasant powering requirements. It needs +/- 10V, 5V, and 3.3V. Almost everything else just needs 3.3V. The four rails are produced from the battery by LT3580s, which can be boost, SEPIC, or inverting regulators depending on how they're hooked up.
The interface will be through a cheap wifi-only tablet. These can be had for $50 or less from China, and they make a solid, inexpensive, wireless display option.



 Michael R Colton
Michael R Colton
 Ross Bamford
Ross Bamford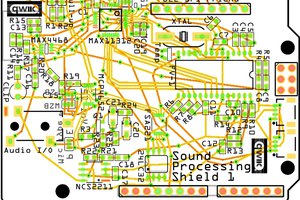
 bobgreenwade
bobgreenwade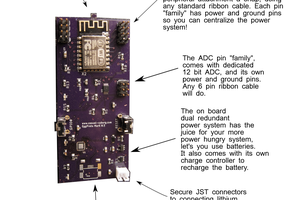
 Casual Cyborg
Casual Cyborg
Is that 400 ksps per channel, or between all 20 channels? And is it similar speed when using them as outputs?