 Carl Bugeja
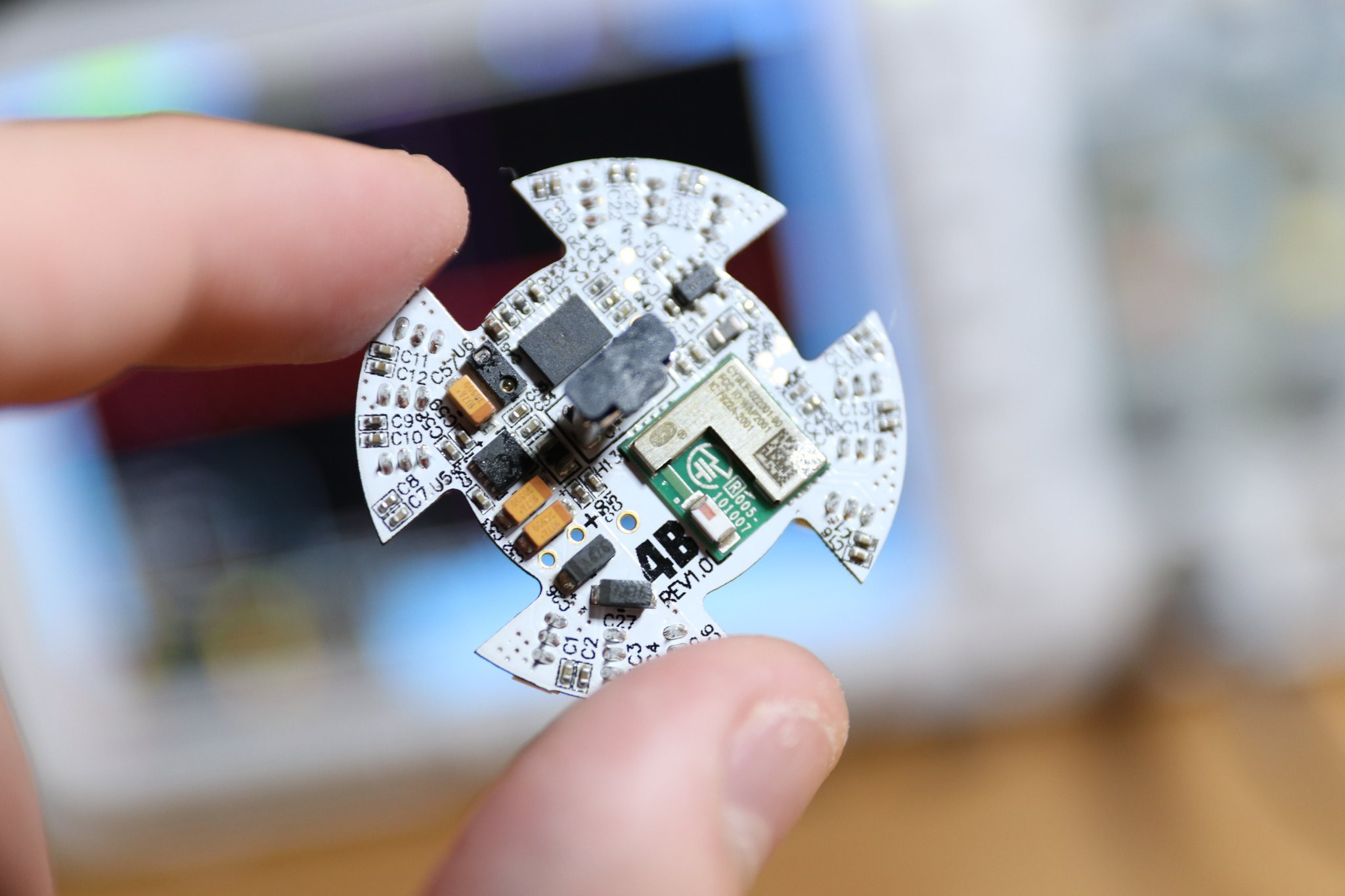
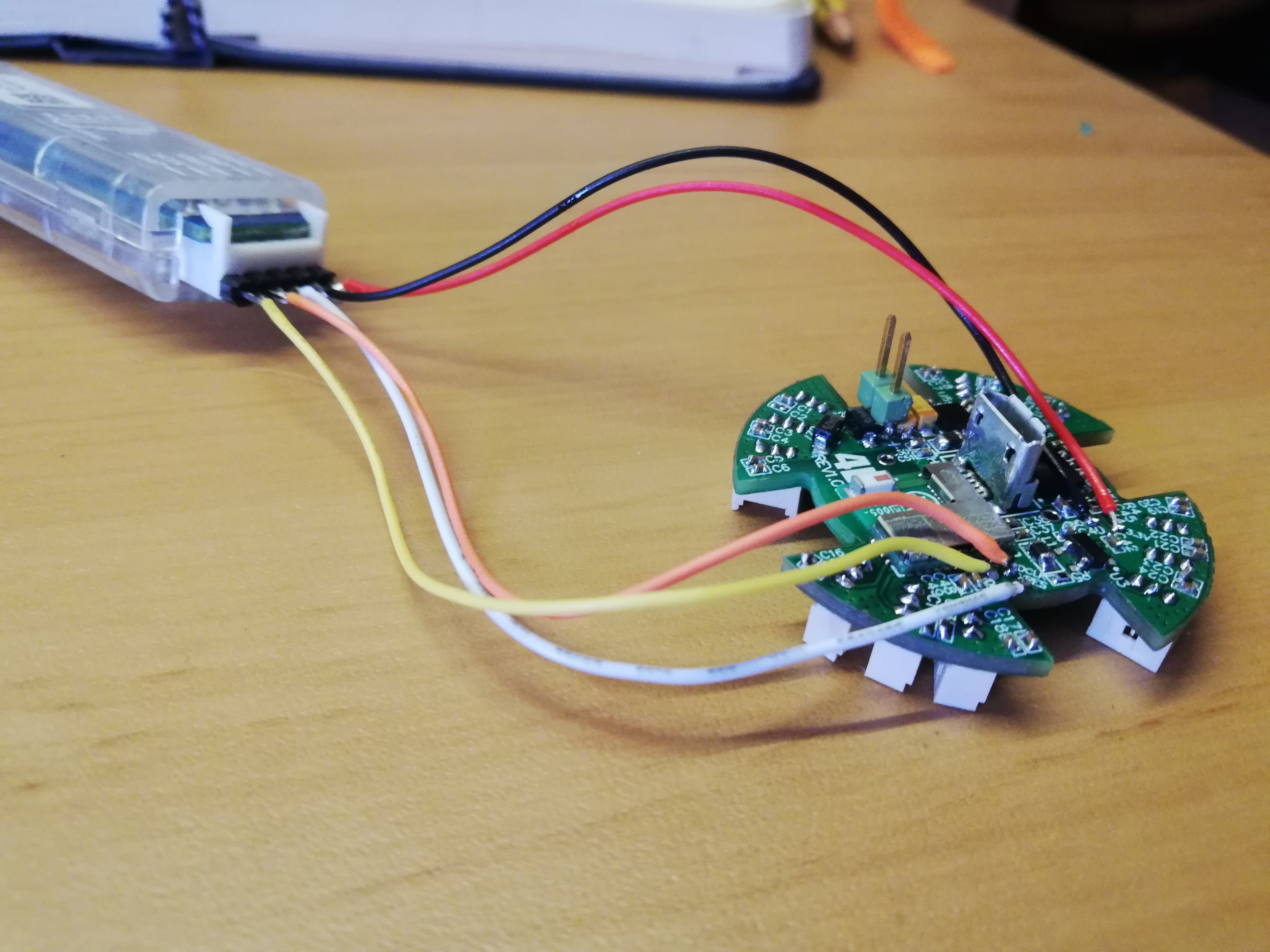
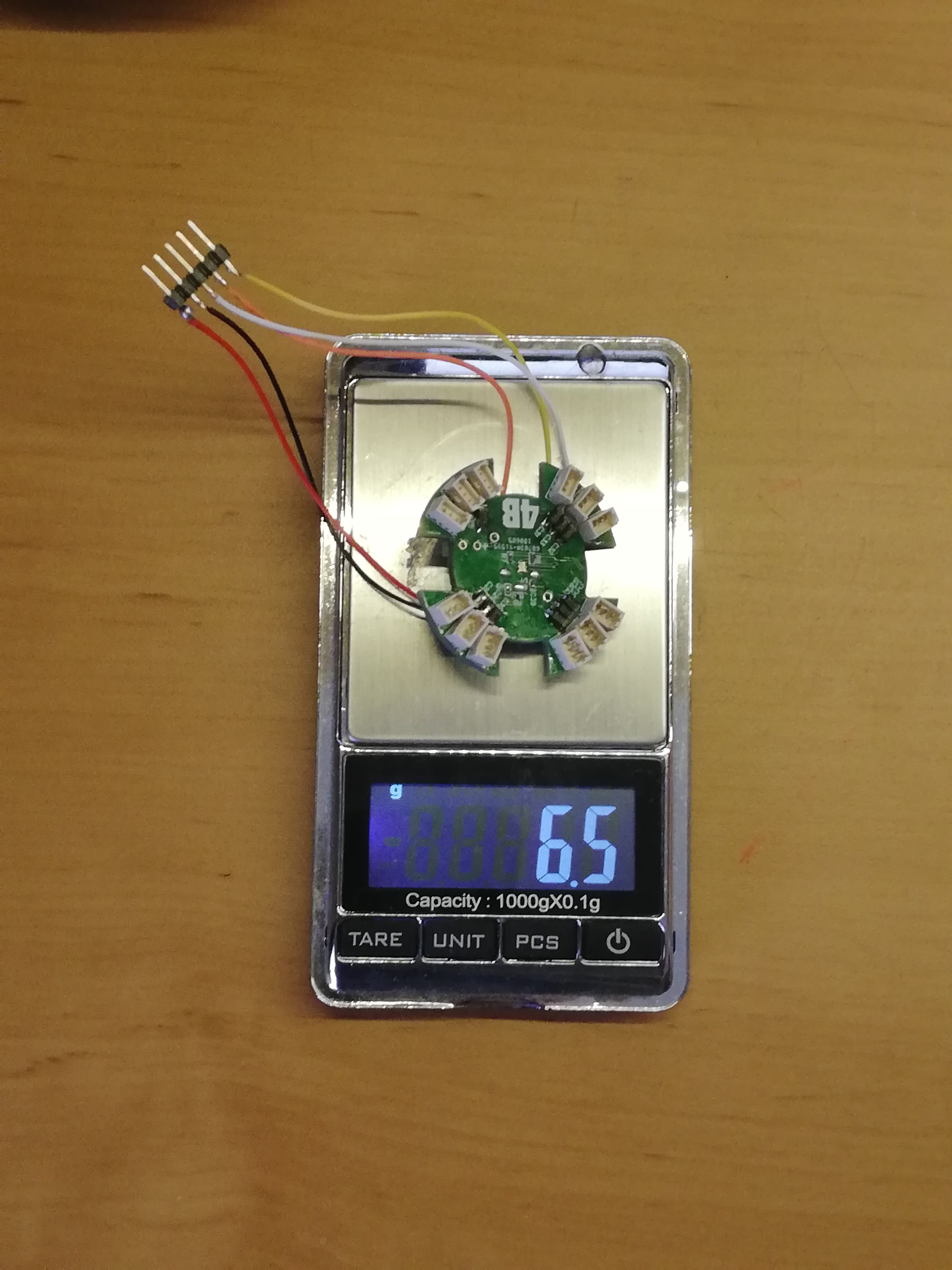
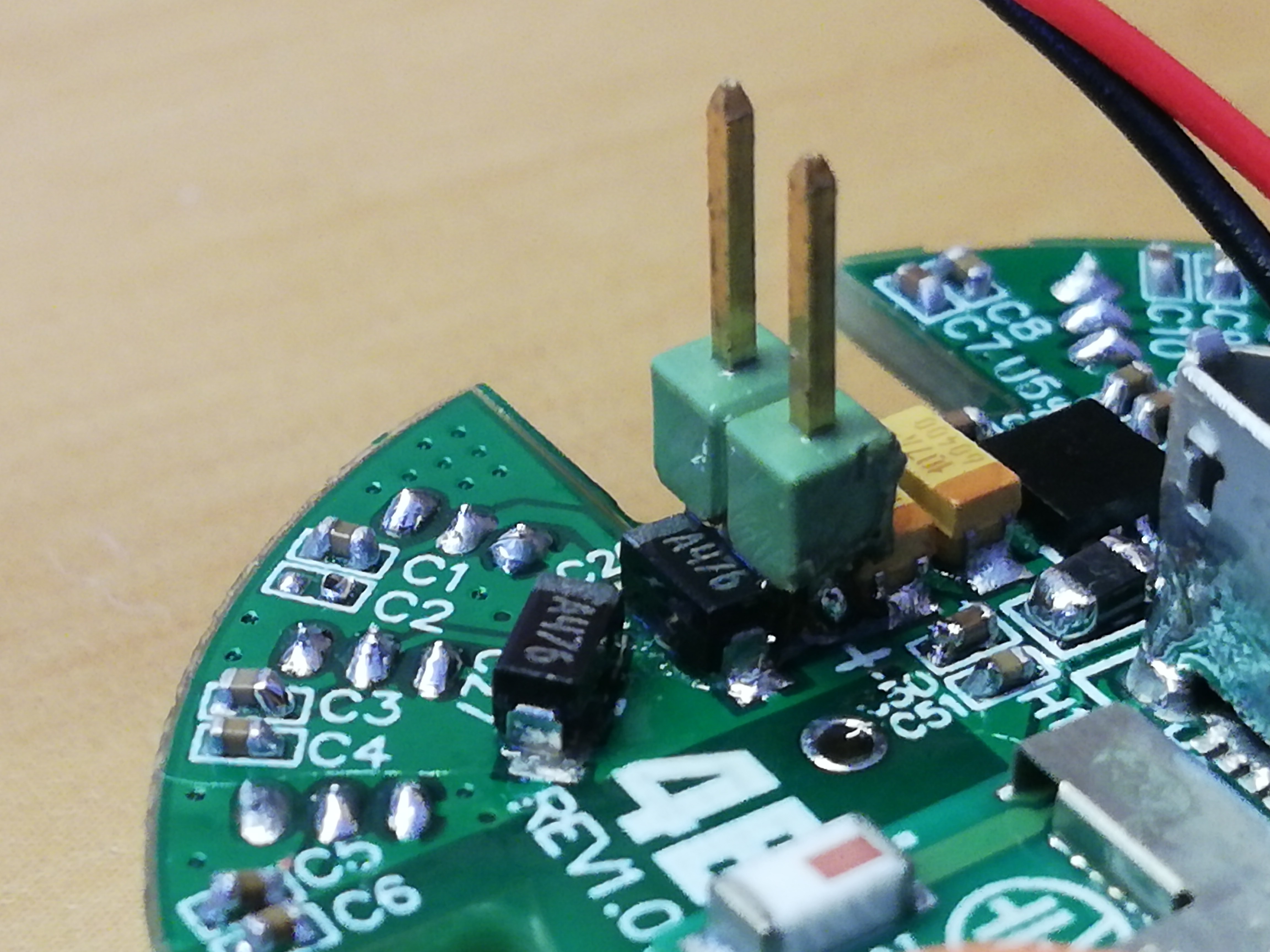
Carl Bugeja4B is a hybrid robot that can be able to both walk and roll. It has three linkages (coxa, tibia and femuer) on each leg which folds into a 6cm diameter ball. That’s smaller than a baseball! To do so, every linkage had to perfectly align into the sphere while leaving space for the battery and pcb.











 DIY GUY Chris
DIY GUY Chris


There has been a great deal of value to me in my involvement with the project. Would like to share it with the pickleball vs paddle tennis team so they can also read it and implement something new.