0%
0%
Micro Robot Development Platform – HDEC-000745
Low cost robotics platform with builtin camera and WIFI module. Design for testing swarm behaviours, machine learning and Image processing.
 Ronald Sousa
Ronald SousaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Apollo Timbers
Apollo Timbers
 ZaidPirwani
ZaidPirwani
 Alberto
Alberto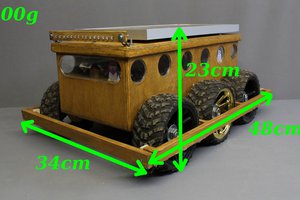
 Norbert Heinz
Norbert Heinz
Are you ever going to post any instructions or anything? How expensive was it? What parts did you use?