 Alberto
AlbertoCheck out our shared gdrive folder, were we are discussing and proposing new ideas and concepts for the next version of the Dtto Modular Robot!
2016HackadayPrize Final Video
The problem
In most natural disaster situations, like hurricanes, earthquakes, fires, there are situations where people get trapped without the possibility to get out to safety by themselves. Then is when search and rescue operation teams come at play. Nowadays, most of the search and rescue operations are carried out by humans, needing a lot of specialized manpower and hours of work to look for possible survivors.
After working at Ground Zero on the WTC, Dr. Robin Murphy, Professor of Computer Science at University of South Florida, who was working with search and rescue robots, said:
“Robots proved helpful” ; “Using robots can minimize the number of personnel on site, and reduce the fatigue and errors” ; She sees mobile robots as scouts able to navigate, adapt and perceive. ; ”Robots will be manpackable” ; “so small that they can fit into small subhuman confines, able to tell their orientation as they snake throught open spaces in rubble” ; “...going where no human should go”
Source: (http://www.aaai.org/Pressroom/Releases/release-02-0910.php)
How it works
In robotics, the usual approach for designing exploration robots
is: First, study the terrain characteristics and then, designing a
robot according to those needs. When moving trough an unexplored and
unpredictable terrain like an earthquake affected building, you never
know which kind of obstacles will you find. There is where modulars
robots can do really well.
The Dtto Modular Robot has been designed with adaptability in mind. Inspired by how fire ants colonies work, a number of modules (or small robots) find each other, connect mechanically and colaborate to act as one only robot, creating a collective inteligence. They can link together and bulid structures without any central comand. The advantatge of being all modules the same is that, if one of them breaks, it can easily get replaced by another one, creating a self-healing structure.
By changing its configuration, the Dtto robot can move like a snake through a small pipeline, then transform into a wheel-like robot to move faster, then transform to a centipede robot when there is no vertical space and finally build a bridge to get to the other side of the hanging floor.
Expandability
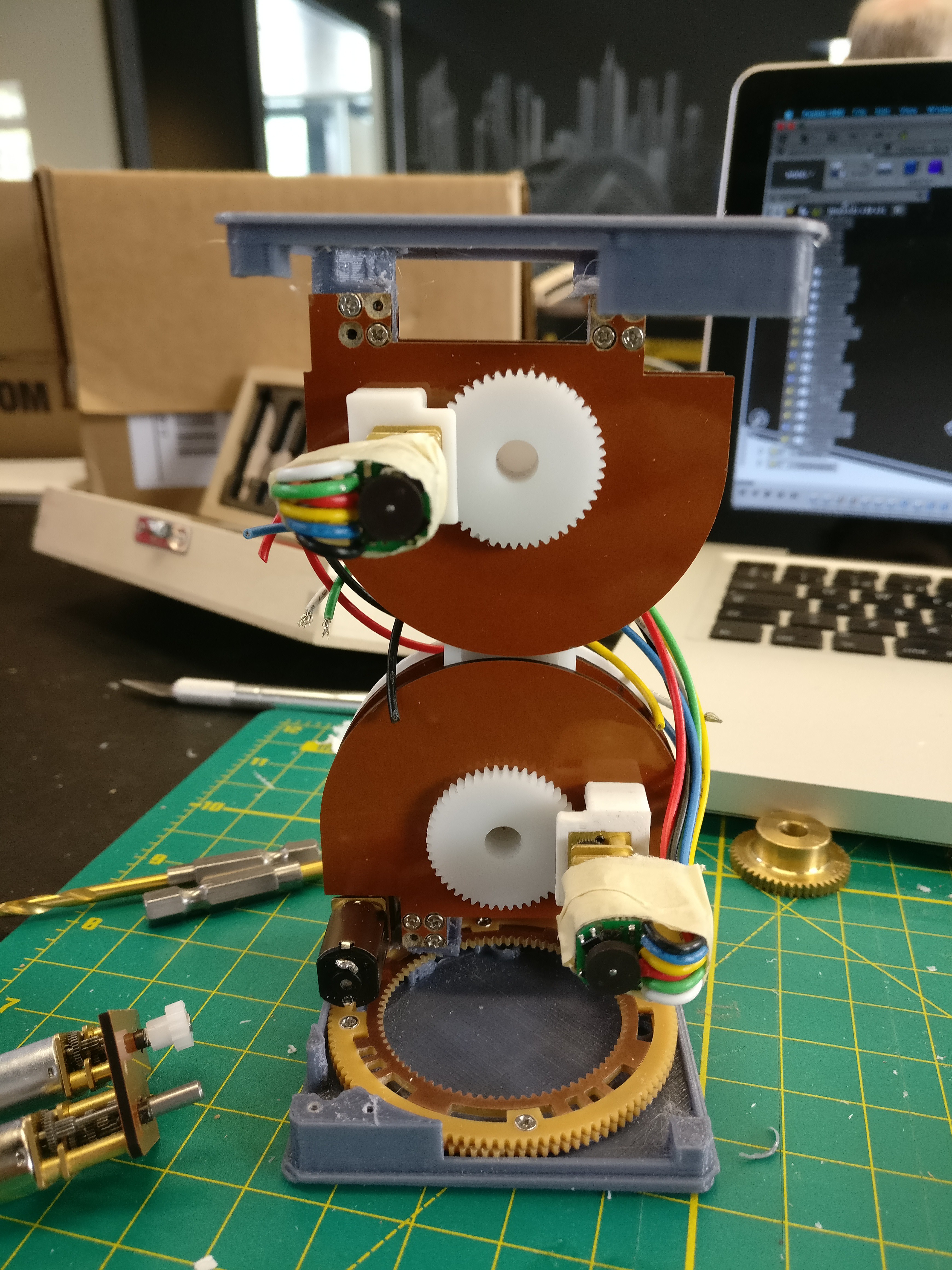
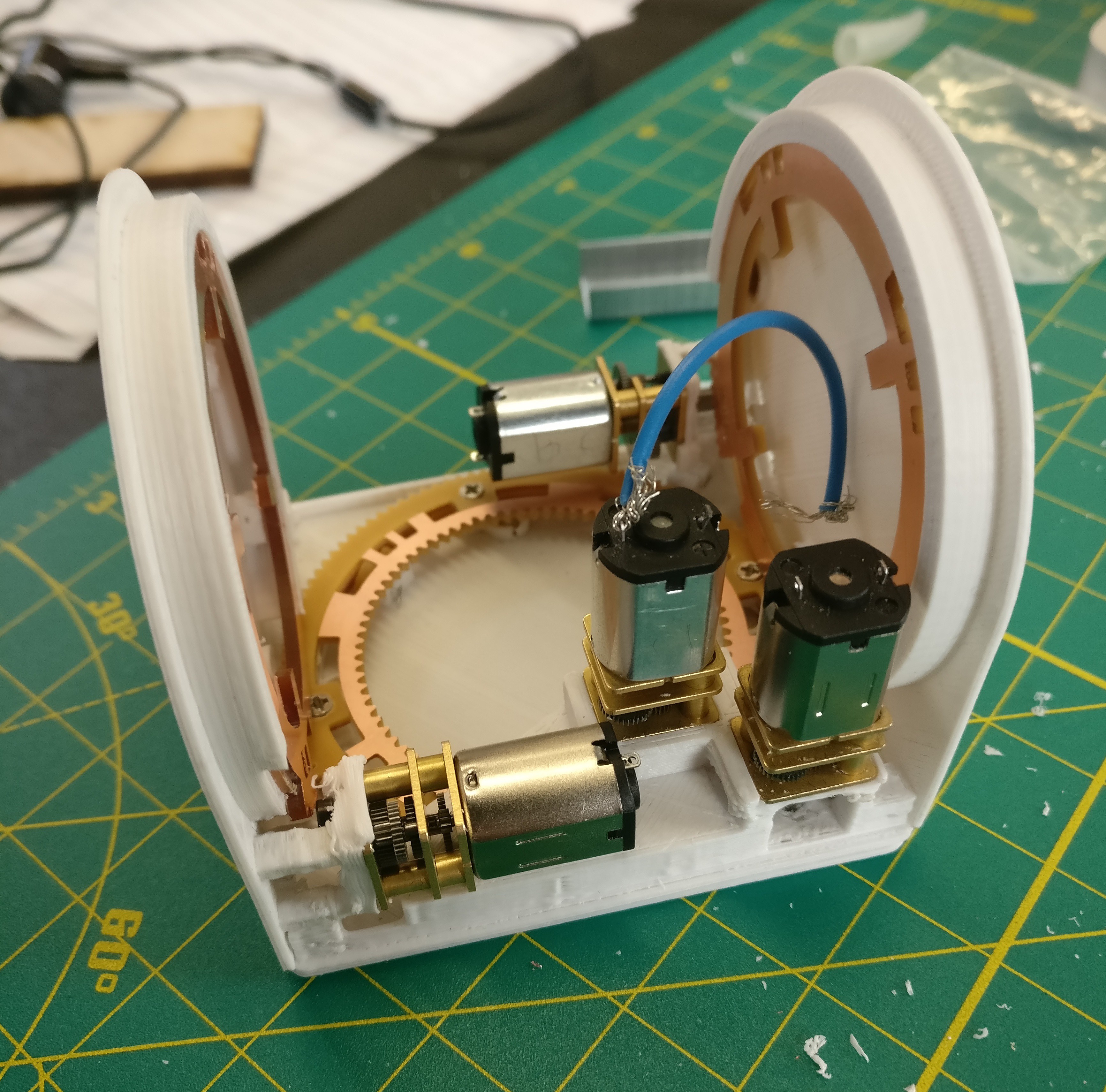
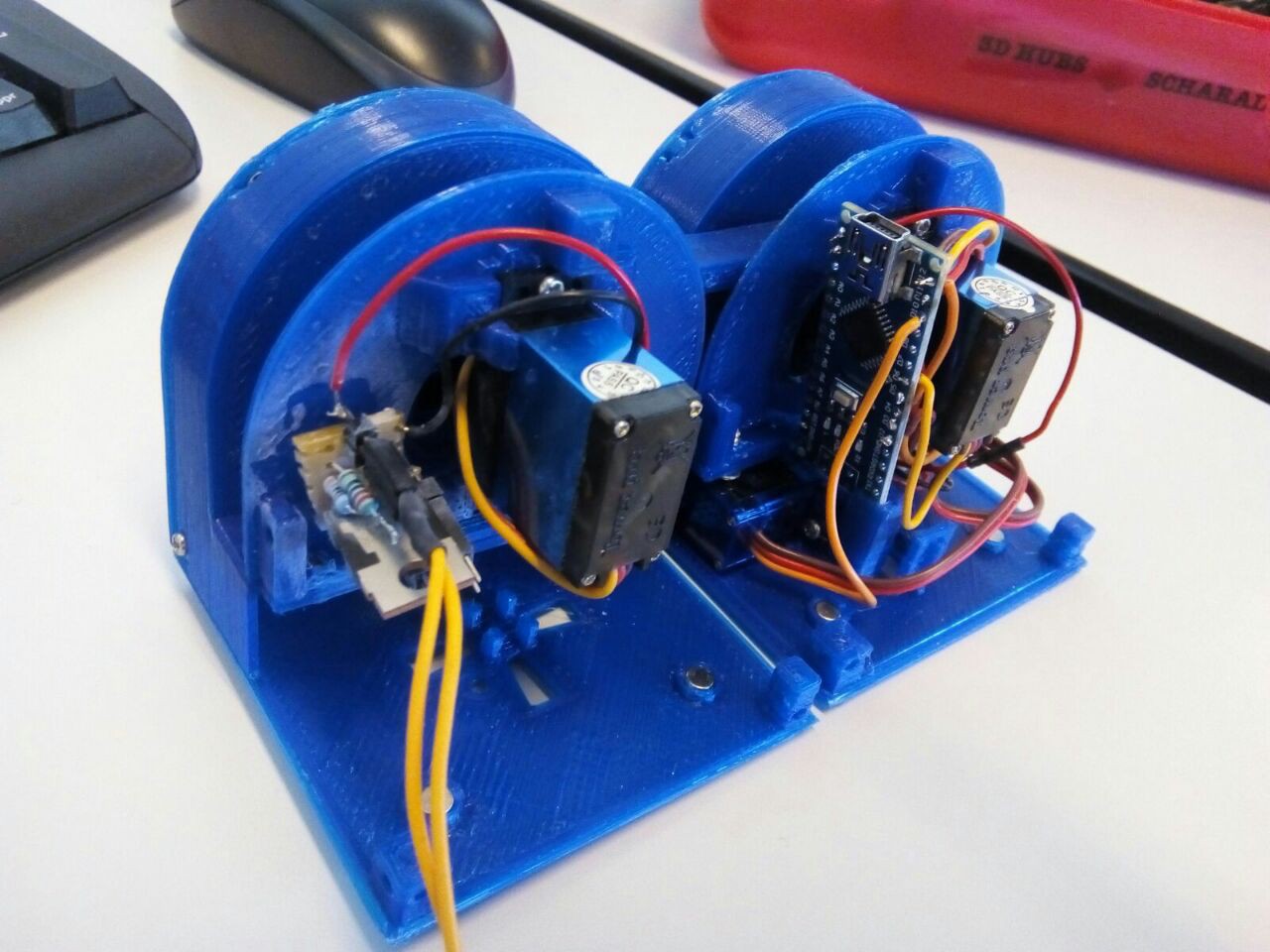
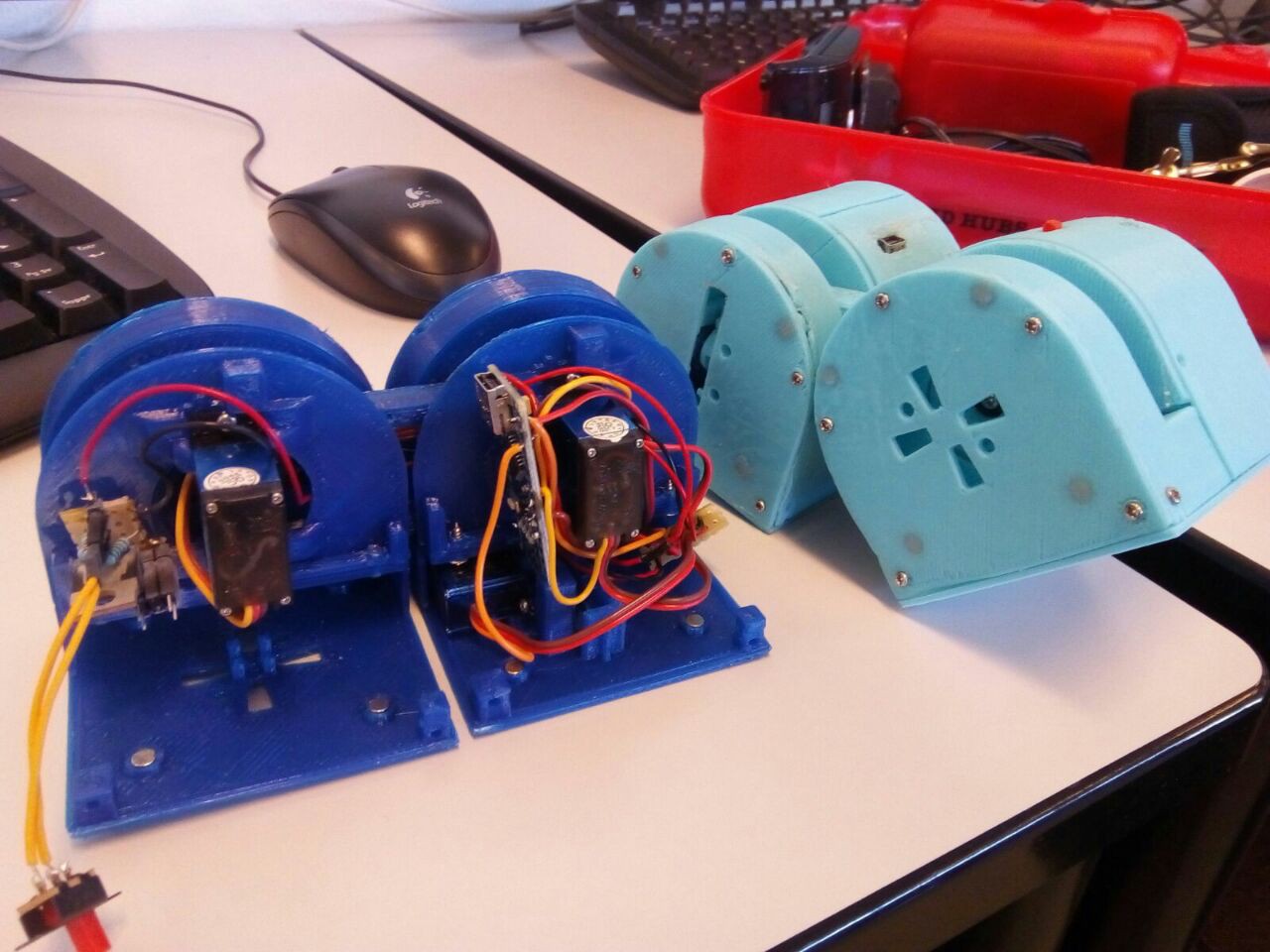
While looking for the minimum size, the robot is designed to contain almost all the electronics and motors in one half, so that there is a large free space in the other half.
That free space can be used to install a thermal camera, microphone and speakers, multiple sensors, more actuators (like grippers) or even more batteries.
SPECS
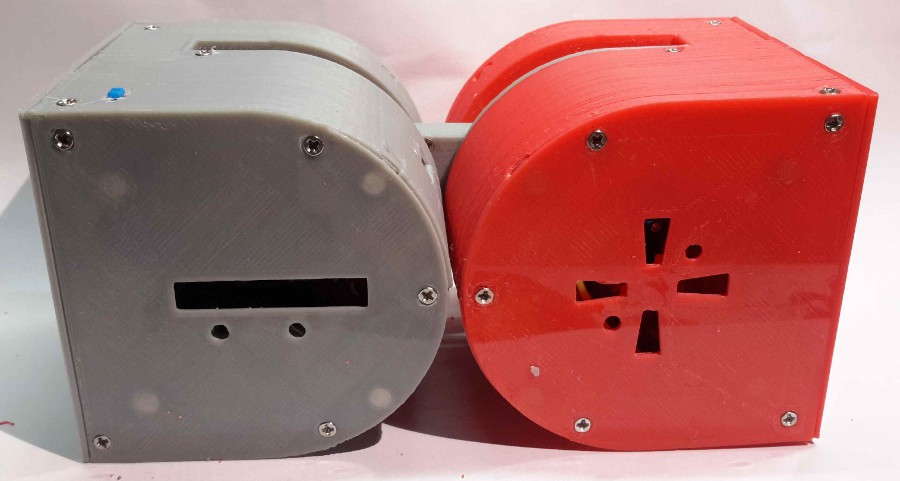
- Small and self-contained robot
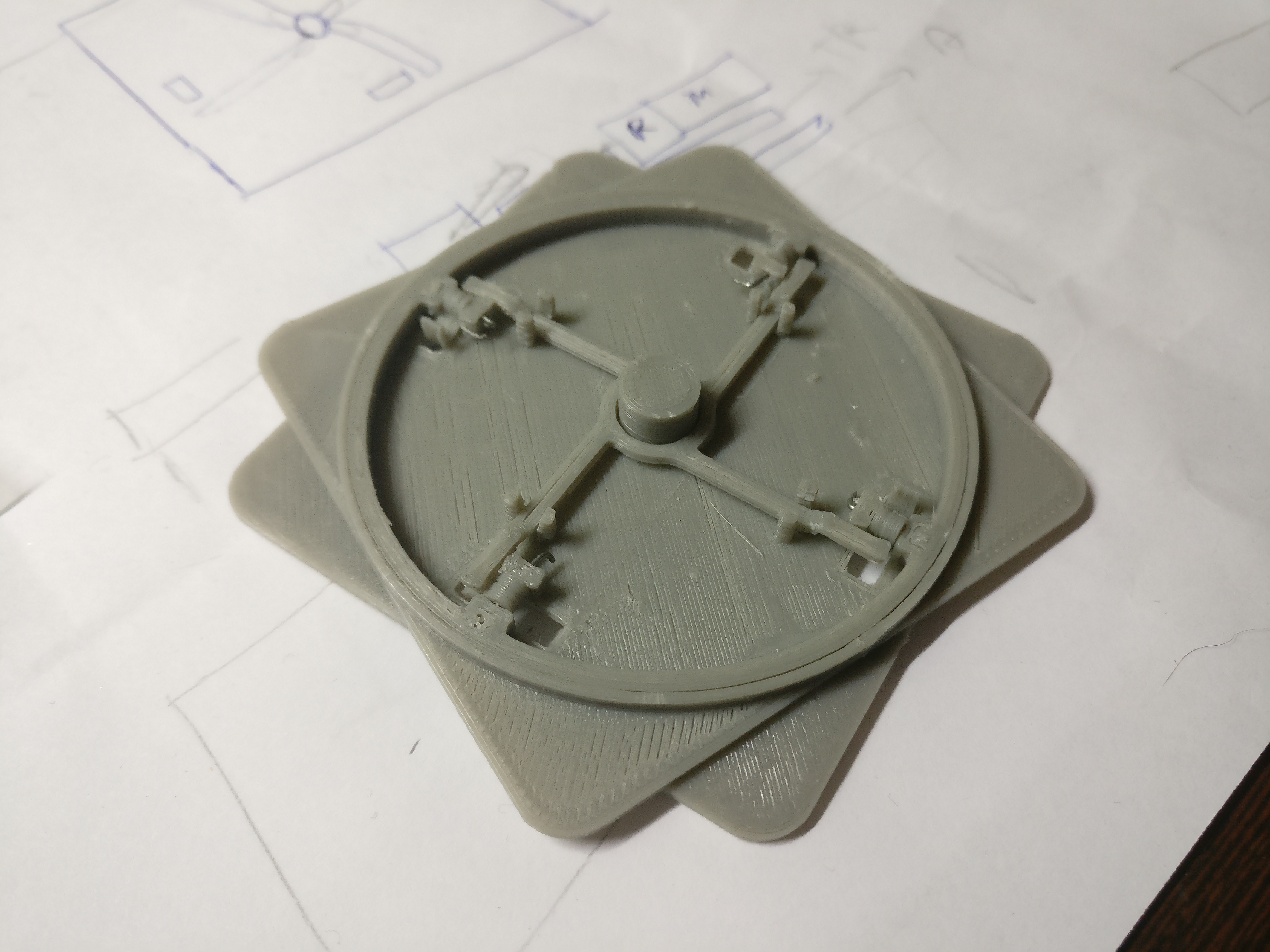
- Fully 3D printable
- Self-reconfiguration capabilities
- Bluetooth + Radio communication
- Multiple locomotion modes (snake, wheel, walker...)
- Rechargable batteries
- Simulation model validated
- Cheap modules (<55 USD)
- Open Source Hardware and Software
- FIRST OPEN-SOURCE SELF-RECONFIGURABLE MODULAR ROBOT!
Special thanks to Dr. Jose Luís Ramírez, and to Dr. Juan González-Gómez “Obijuan”, for their support and help everytime I needed it.
It has been fully printed with open-source 3D printers, uses open-source hardware and has been designed entirely on FreeCad.
This robot is Inspired by the MTRAN III, by The National Institute of Advanced Industrial Science and Technology (AIST), Japan. (https://unit.aist.go.jp/is/frrg/dsysd/mtran3/index.htm)
The CAD files, and STL printing files are located in the FILES and in the github repository (https://github.com/otrebla333/Dtto-Modular-Robot/tree/master/3D-printing)
This project and all of it's files, images, videos and texts are entirely licensed under the CC BY-SA 4.0 license. (http://creativecommons.org/licenses/by-sa/4.0/legalcode)
VIDEOS:
More videos:
https://www.youtube.com/playlist?list=PLoFHruvLOzZ8lMCxhqWBXichj1xdftpll...
Read more »
















 EK
EK
 BTom
BTom
 Mykolas Juraitis
Mykolas Juraitis
 Duane Degn
Duane Degn
OMG this is the coolest thing I've ever seen. Have you ever thought about selling it to rescue organizations?