 Jamal-Ra-Davis
Jamal-Ra-Davis- The effective display area is 60x8x6 "pixels"
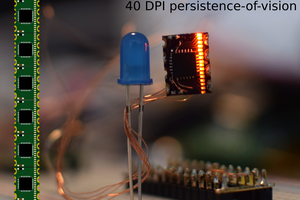
- The display uses apa102-2020 addressable LEDs. There are 8 LEDs on each of the 6 blades used to make the display area.
- I'm using an atsamd21g18 microcontroller to drive the LEDs and run all the animations. I had originally started with an atmega328p while I was prototyping, but it wasn't fast enough to keep up as I scaled up to the final design. The microcontroller and control board both rotate along with the LED boards.
- A hall effect sensor on the control board is used with a magnet mounted to the enclosure to measure the rotational speed of the display, and used as a point of reference to stabilize the image being displayed.
- Inductive coils are used to transfer power from the stationary base to the rotating LEDs and control board. I used these ones from adafruit: https://www.adafruit.com/product/1407
- I'm using an arduino nano, with a simple motor driver to control the brushed motor that spins the display. I'm currently just using a potentiometer to set the speed of the motor
The code is still very much a work in progress, but it can be found here:
https://github.com/Jamal-Ra-Davis/pov_display




 zakqwy
zakqwy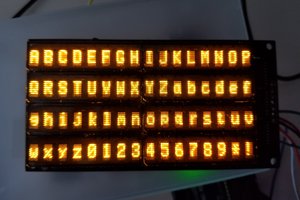
 sjm4306
sjm4306
 Stephen Holdaway
Stephen Holdaway
 seasleyece
seasleyece
great project!
i have a simple 1-Layer POV concept project slowly going...
currently only documented on github:
https://s-light.github.io/ortogere/docs/ideas/
but currently its on-hold (have other things on priority...)
what RPM do you run this at?
and what is your display update speed / framerate?