 Musa
MusaAll source code in github page.
Methodology
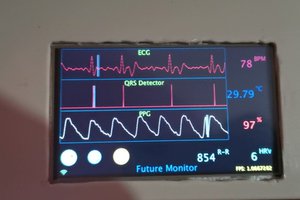
Project construction is planned in three basic stages. The first stage includes the user interface software. In the second step, the finger and hand values can be accessed via the internet and at the same time the Python code is written in order to transfer the image on the TCP / IP protocol. Finally, the Arduino platform was chosen to read the control and sensor values of the servo motors. First of all, the user attaches Leap Motion to his computer. Then it starts the application, which is prepared in C #. When the user moves his / her hands and fingers; Hand information is read and interpreted by the application. Then the user enters the IP address of the device he wants to connect to and then connects to the opposite device (to server). The connected device is actually a small computer. The preferred card in this project is Raspberry Pi. Alternatively, cards such as BeagleBone may be used. The most important feature of these cards is to have an operating system (Linux) embedded in them. With this operating system it is possible to run complex programs that microcontrollers can not run. In this context, the Python code in Raspberry Pi responds to requests to connect over IP (clients). After the connection, the Arduino card connected to Raspberry Pi reads the sensor values via the serial port and the media information is sent to the interface. These values are plotted in real time on the interface. Hand and finger data from the interface are also sent to Arduino in the same way. These are converted to PWM waves for robot hand control and are provided for hand movement. In addition, the user interface from the camera on the robot hand goes to the camera image and the media data read from the sensor.

 moibra95
moibra95
 Md. Khairul Alam
Md. Khairul Alam