 Bud Bennett
Bud BennettLucy is our seven year-old border collie schipperke mix. We got her as a puppy. 18 months ago she was diagnosed with Progressive Retinal Atrophy -- she is not getting enough blood flow to her retinae and she is slowly going blind. There is no cure.
She can still see in bright light, but has difficulty seeing in dim light or at night. She memorized our house layout and normally doesn't have any difficulty getting around day or night unless something has moved. Occasionally she bumps into something left in the middle of the floor or a drawer left unclosed.
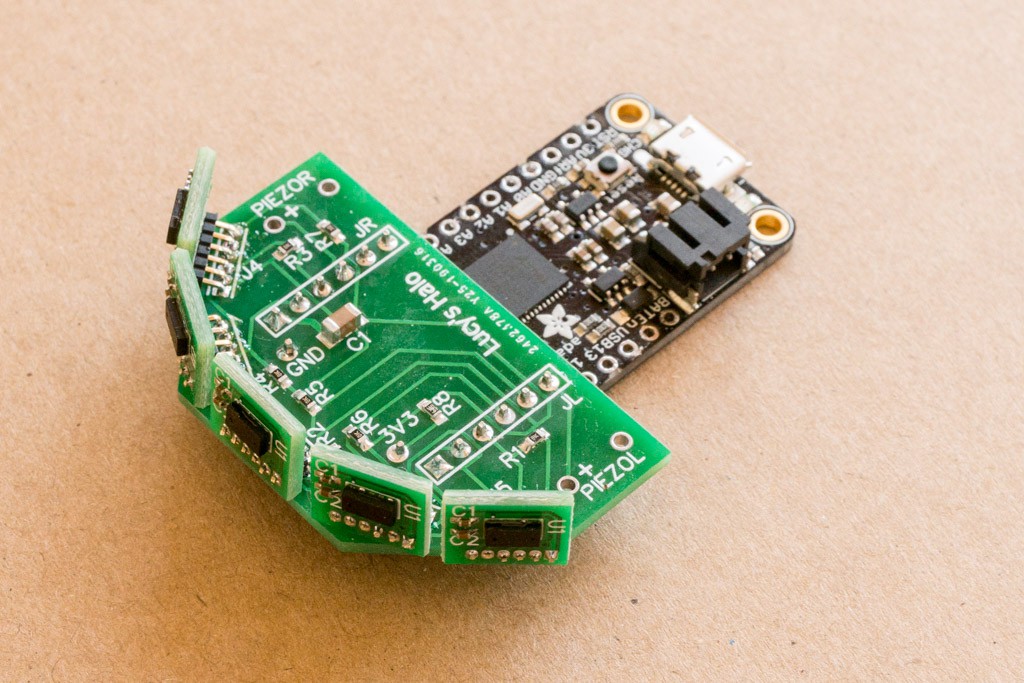
We purchased a halo. It is a metal hoop that surrounds her head. If she inadvertently gets too close to an object the halo will collide with the object instead of her head. The halo is attached in two locations to her body -- a strap around her neck, and a strap around her chest. The contraption looks uncomfortable to me, but Lucy has tolerated it the few times we have burdened her with it. There must be a better way.

I have begun to investigate an alternative to the halo. Lucy still has all of her other senses. I think that I can design and manufacture an electronic equivalent to the halo that will be smaller, lighter, and function better that what is available now.
The criteria:
- Fit -- should be easily applied and removed. Location -- above the head. Lucy should be able to sleep with the halo attached.
- Light -- Lucy is a small dog, about 25 pounds. The entire unit should weigh just a few ounces.
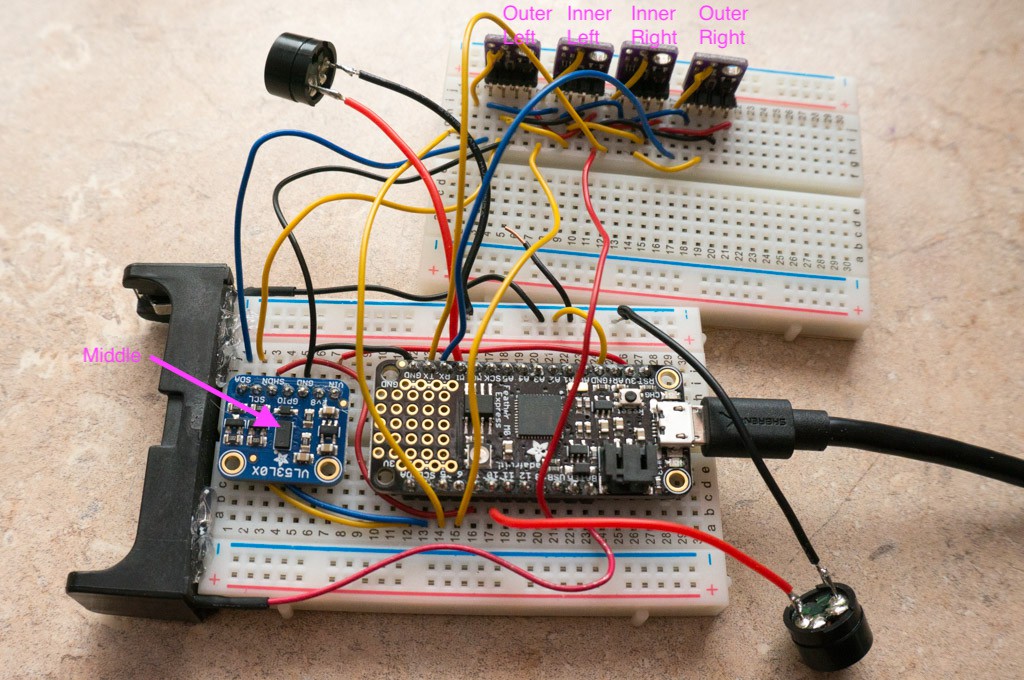
- Range and direction -- should be able to detect object from about 10mm to 1000mm. It should be able to indicate the position and approximate distance of the nearest object within range. Additionally, it should be able to indicate position and range of multiple objects (a stretch goal).
- It should perform similarly in brightly lit and poorly lit environments.
- It should not degrade Lucy's other senses.
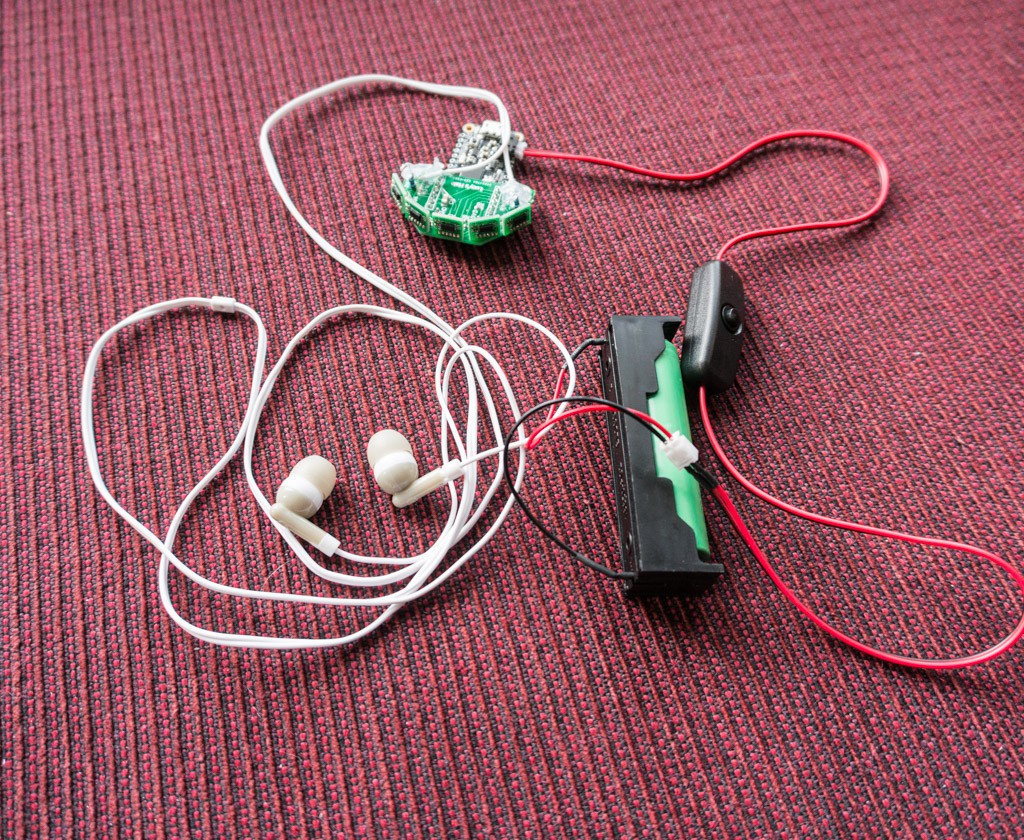
- Battery operated -- 170 hrs of operation from a rechargeable lithium battery cell.


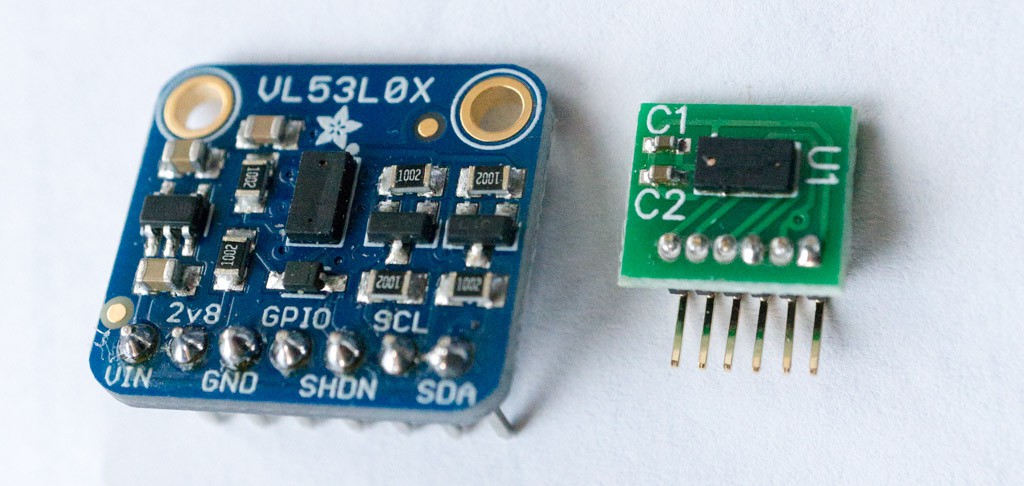
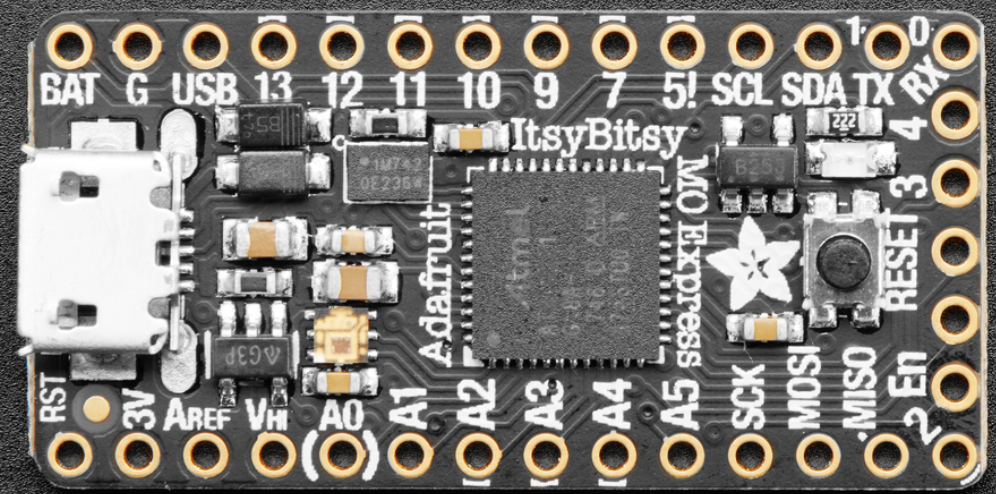
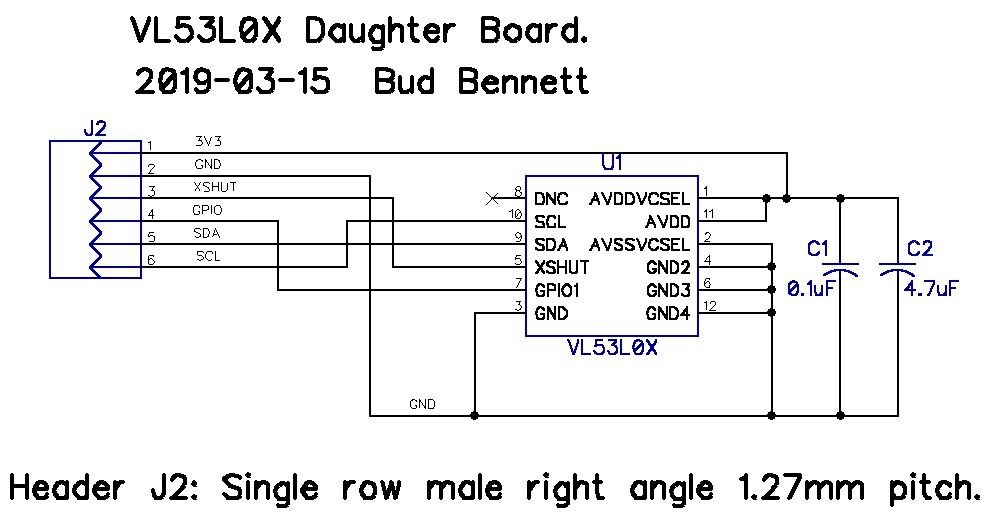
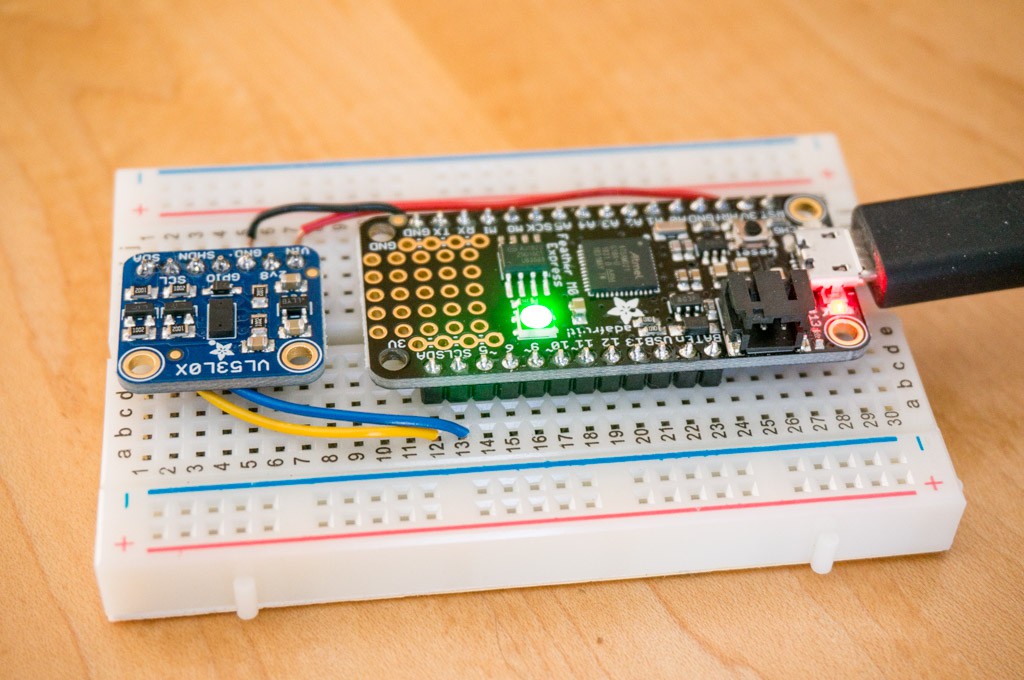 I got into trouble immediately by not being familiar with the Arduino IDE and methodology. I overwrote the existing CircuitPython data with some C code for the VL53L0X. It took me about an hour to get the Arduino to report distance from the sensor. But after that I would have to learn to program in C to go any further. (One of these days I'll learn C.)
I got into trouble immediately by not being familiar with the Arduino IDE and methodology. I overwrote the existing CircuitPython data with some C code for the VL53L0X. It took me about an hour to get the Arduino to report distance from the sensor. But after that I would have to learn to program in C to go any further. (One of these days I'll learn C.)
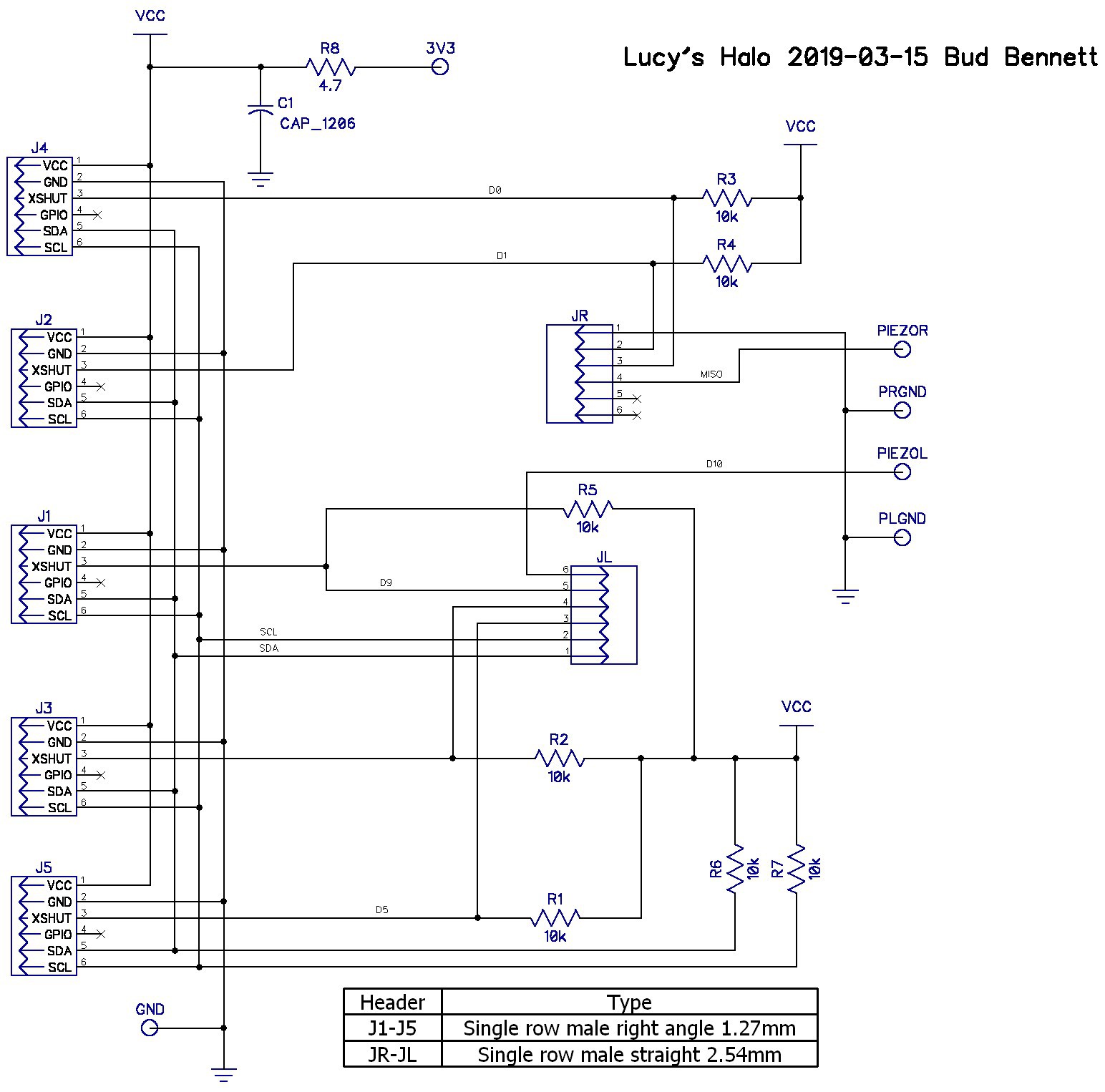
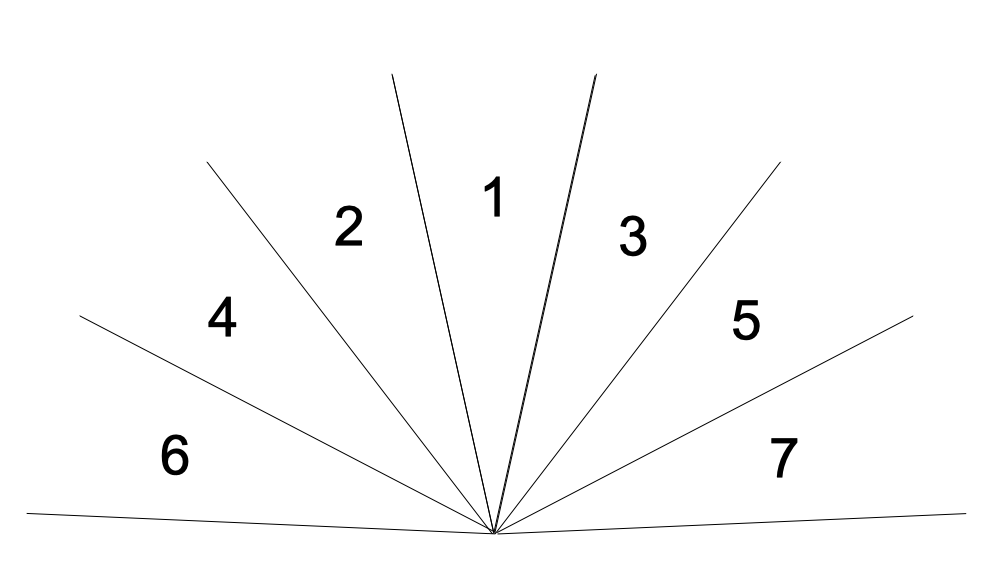 I believe that the minimum number is 5. It's possible that 3 would work, given that Lucy is most likely to collide with something directly in front of her and her head is swiveling to match forward direction. Any comments on this? More sensors mean higher power requirements and shorter battery life (and higher cost -- the sensor is about $6).
I believe that the minimum number is 5. It's possible that 3 would work, given that Lucy is most likely to collide with something directly in front of her and her head is swiveling to match forward direction. Any comments on this? More sensors mean higher power requirements and shorter battery life (and higher cost -- the sensor is about $6).









 Minimum Effective Dose
Minimum Effective Dose
 CaptMcAllister
CaptMcAllister
 Craig
Craig
We are not sure of how to do this ourselves but following along and supporting this endeavor! Question- would this give dogs a sense of depth perception for if they want to start trying to go down stairs, or off of the couch? Did Lucy stop these behaviors due to loss of vision, and do you think this has assisted? Also wondering if would help dogs have an idea of if there is a sudden drop like a curb or flight of stairs. Apologies if you have said this already. So grateful for your work in this field thank you, we agree that existing halos are mostly necessary but bulky and not the most efficient unfortunately.