0%
0%
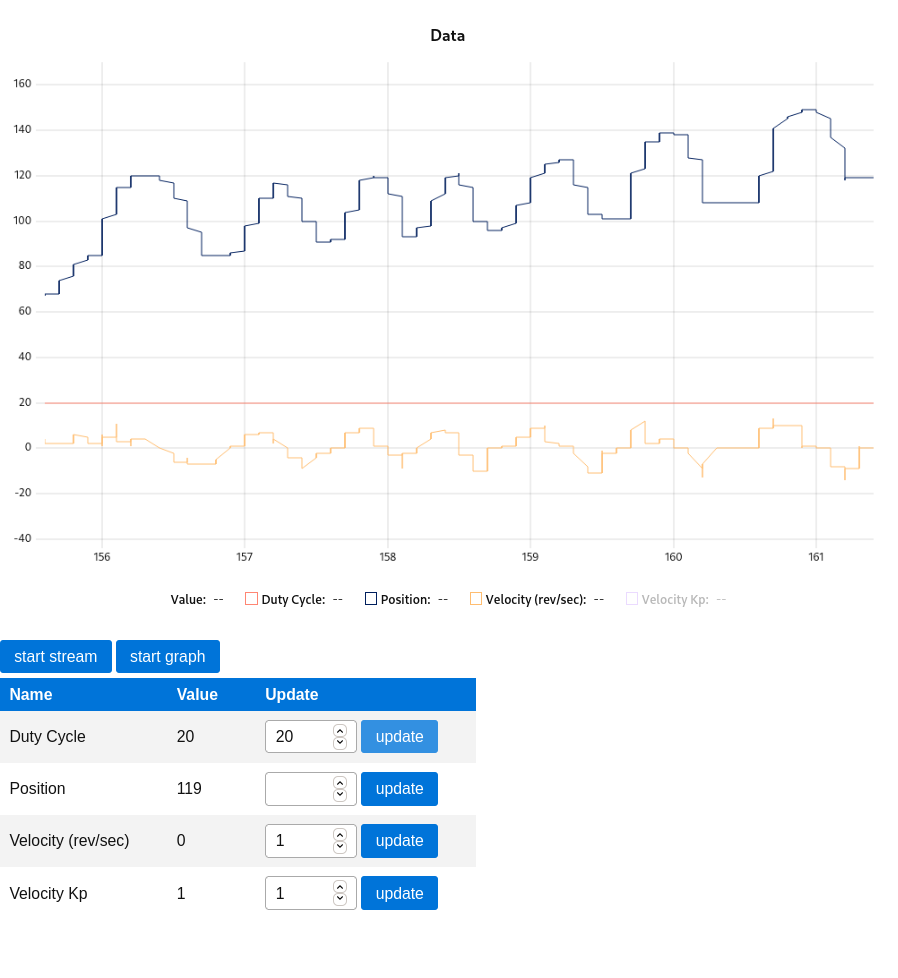
Portable Vertical Plotter
Small esp32 based vertical polar plotting machine.
 Luke Thompson
Luke ThompsonBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Charlie Smith
Charlie Smith
 ziggurat29
ziggurat29
 Mark VandeWettering
Mark VandeWettering
 E/S Pronk
E/S Pronk
hi. have you got something ready to show?