0%
0%
Swarmesh NYU Shanghai
Scalable swarm robot platform using ESP32 MESH capabilities and custom IR location
 Rodolfo
RodolfoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
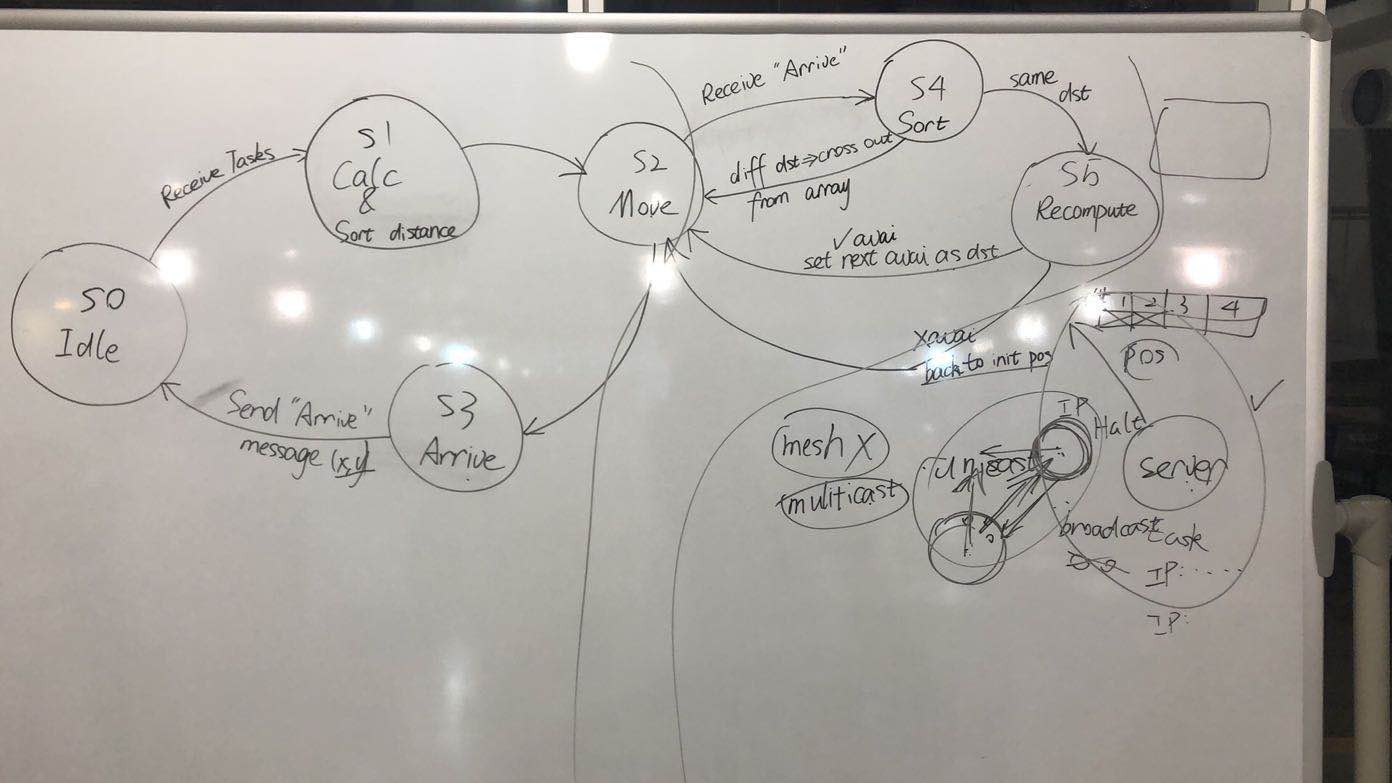
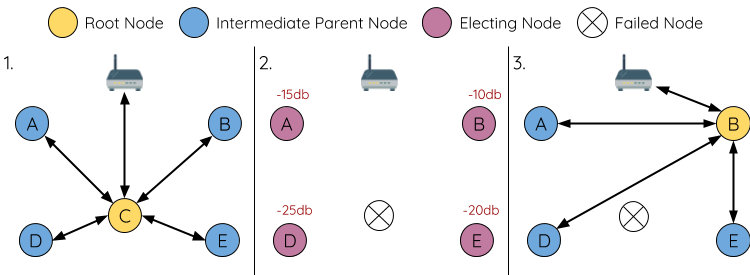
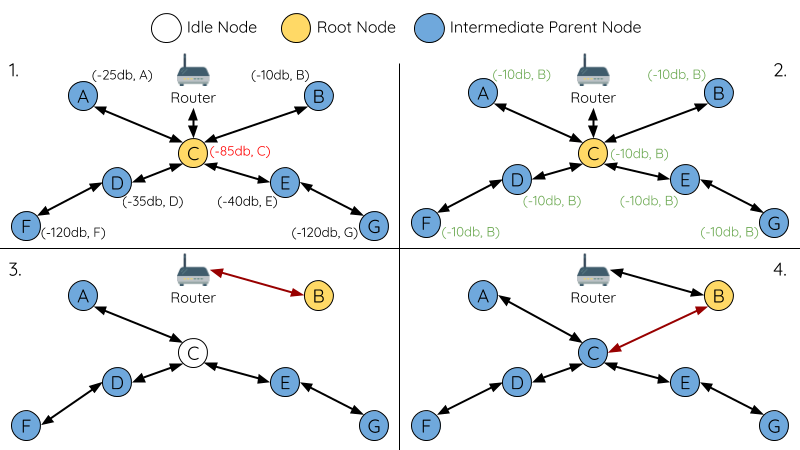
 Figure 1. FLow chart of task assignment
Figure 1. FLow chart of task assignment


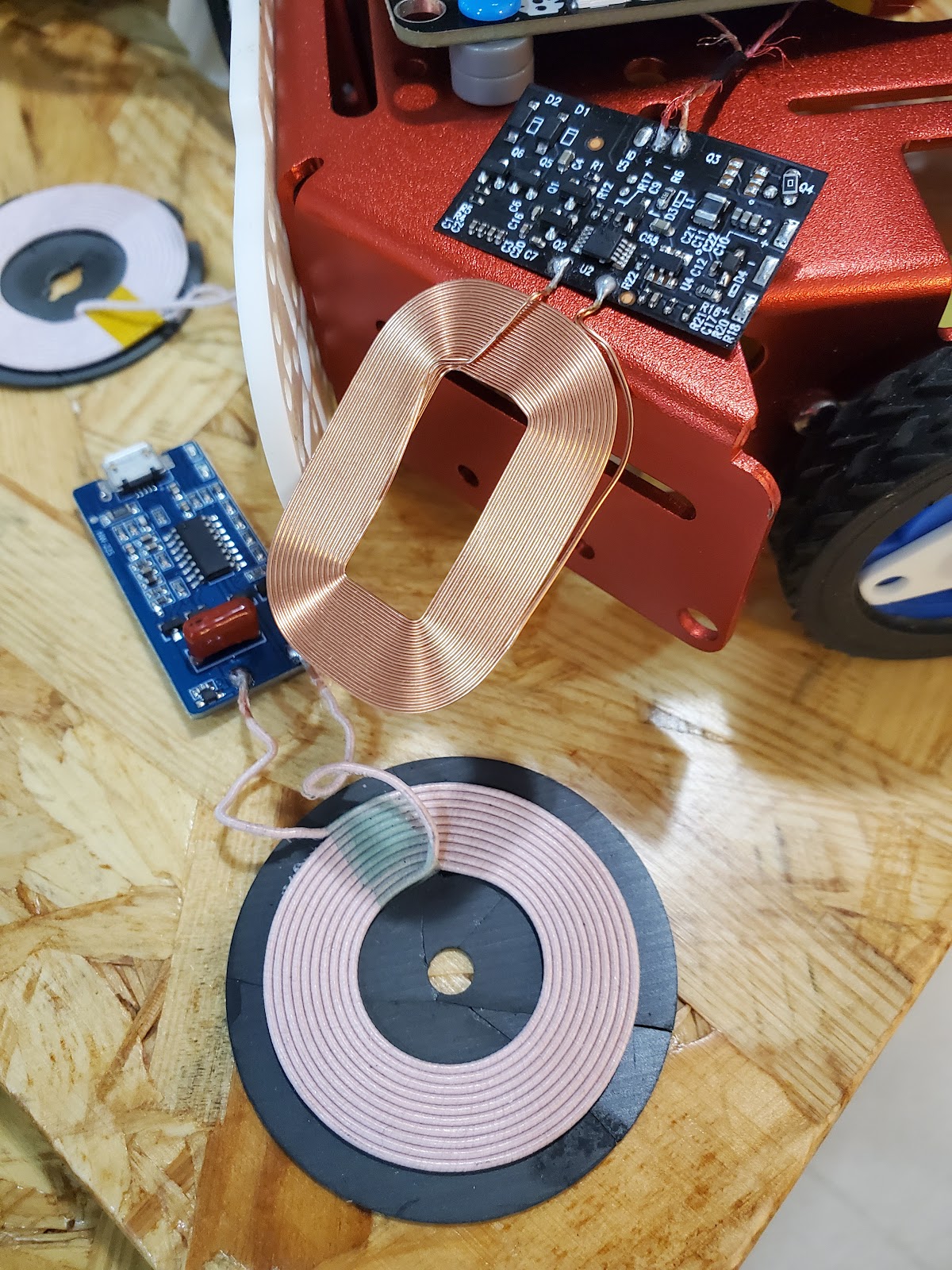
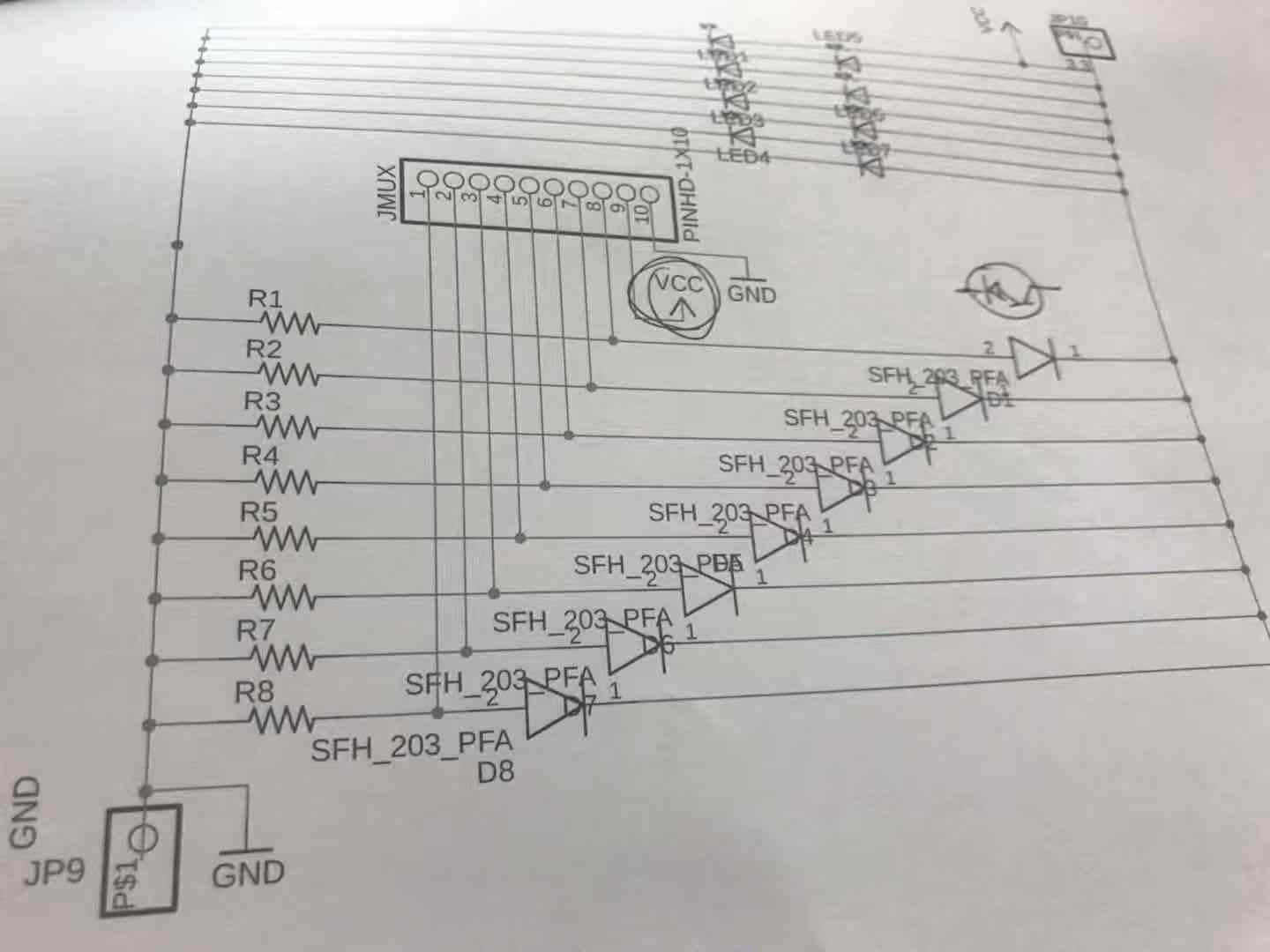
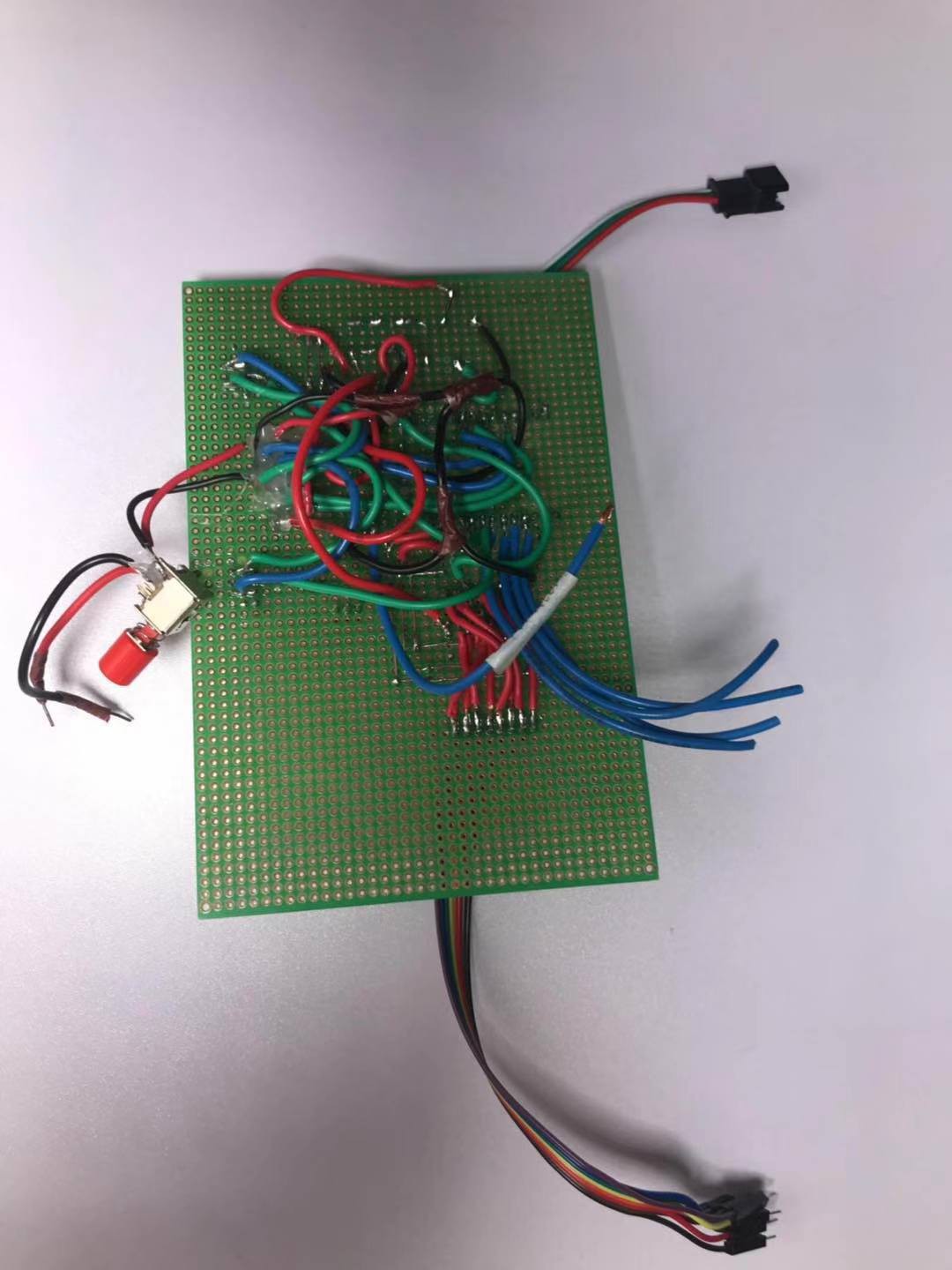
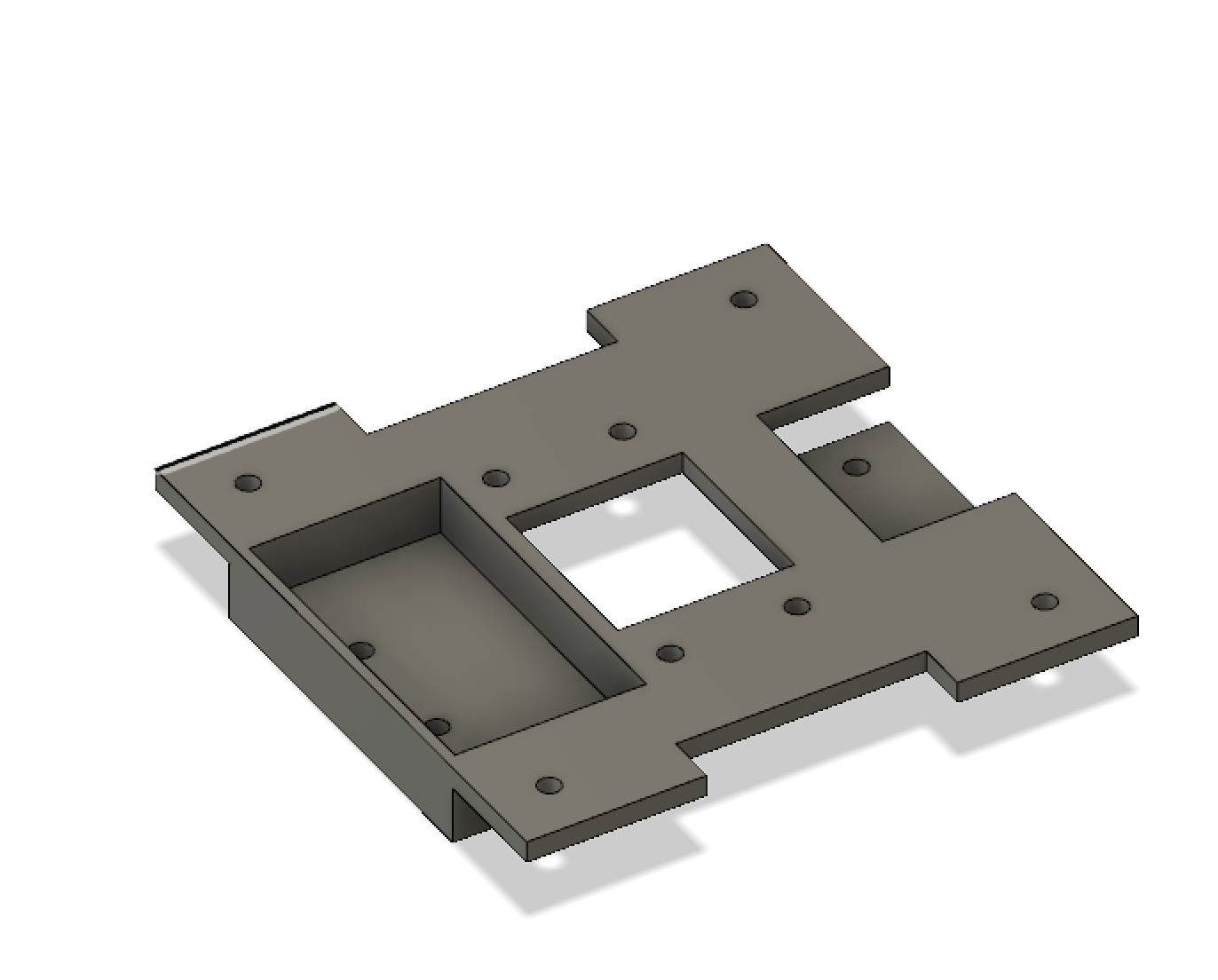
 Figure 3. Receiver plate design
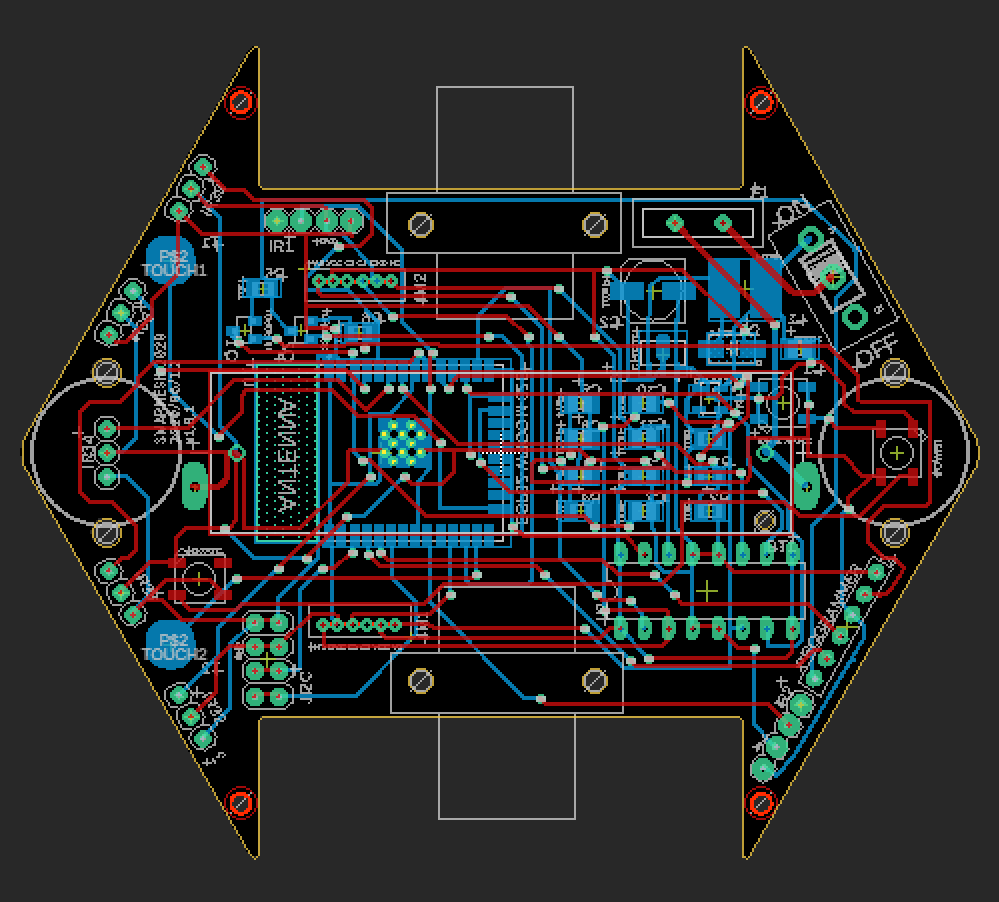
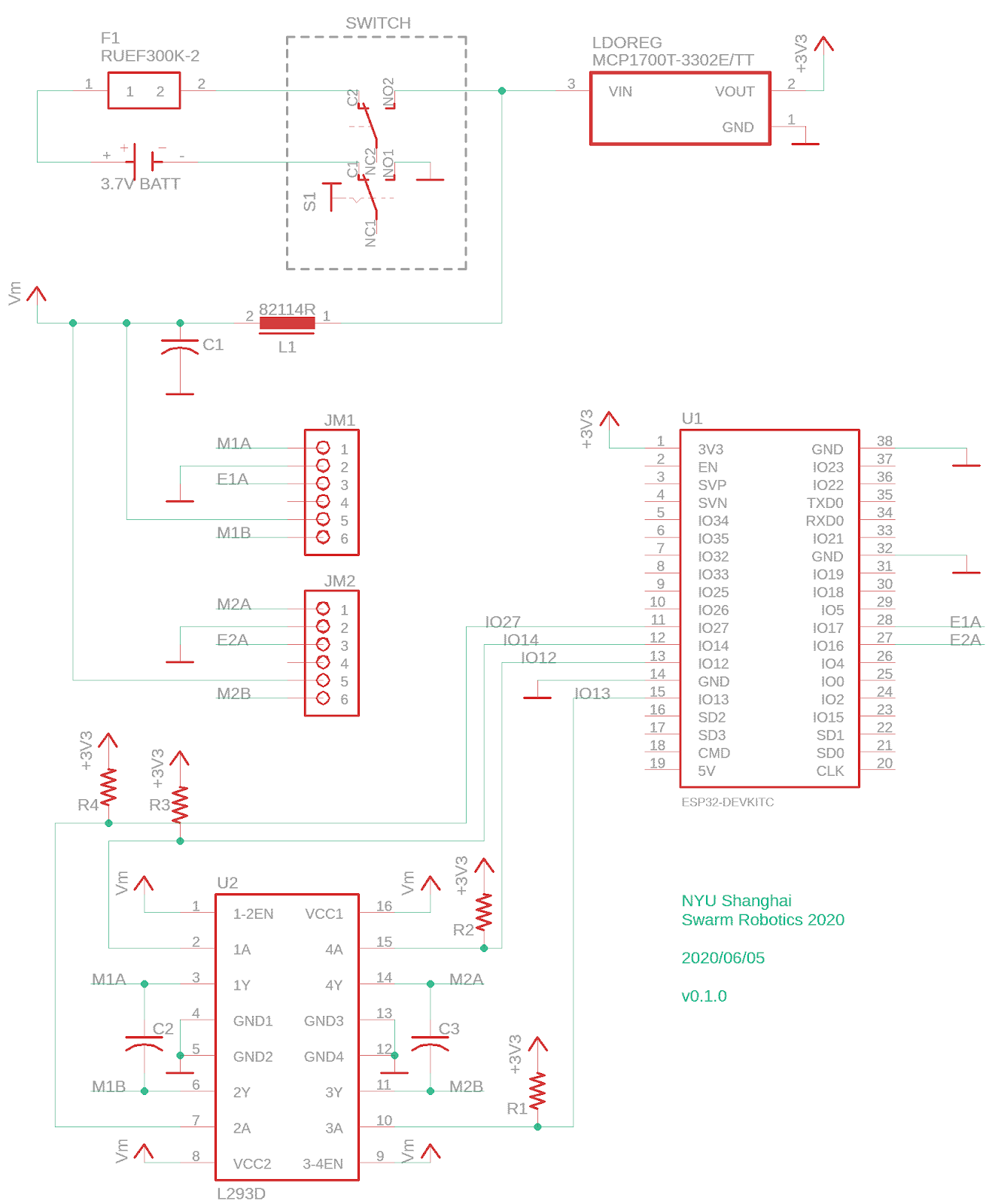
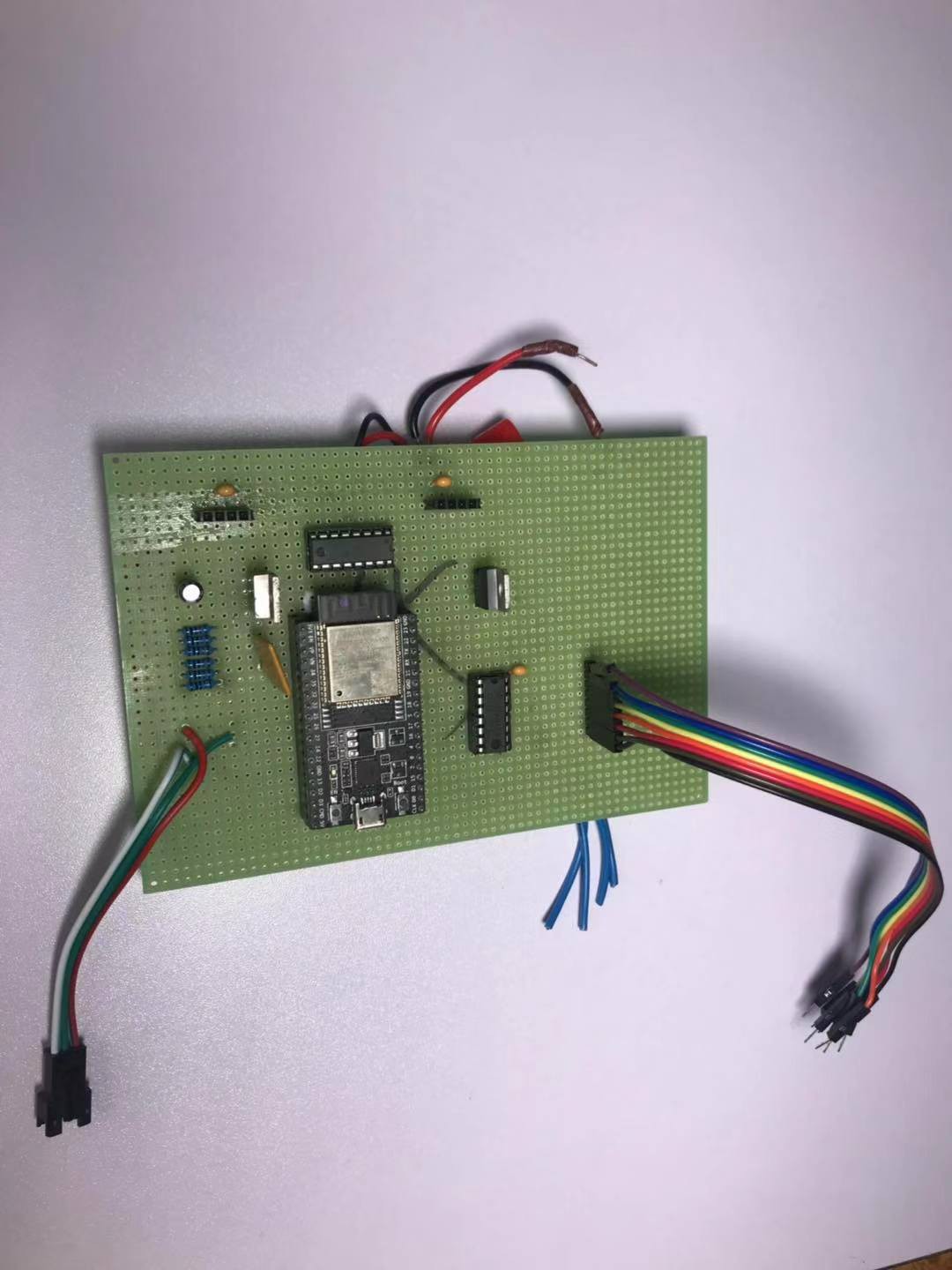
Figure 3. Receiver plate design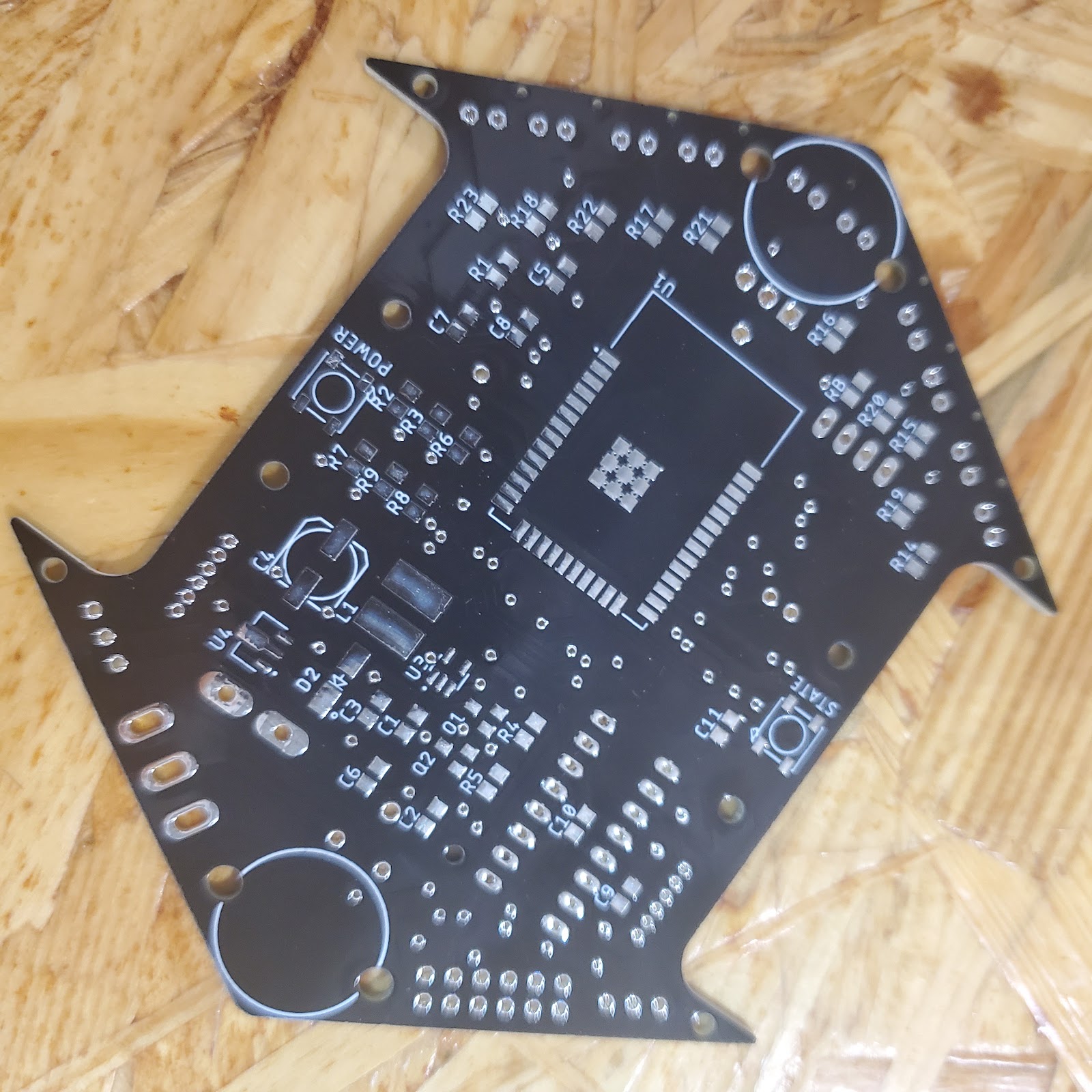 Figure 4. Bottom view of PCB v.1.0.2
Figure 4. Bottom view of PCB v.1.0.2 Figure 5. Ai Thinker USB TO TTL Programmer
Figure 5. Ai Thinker USB TO TTL Programmer






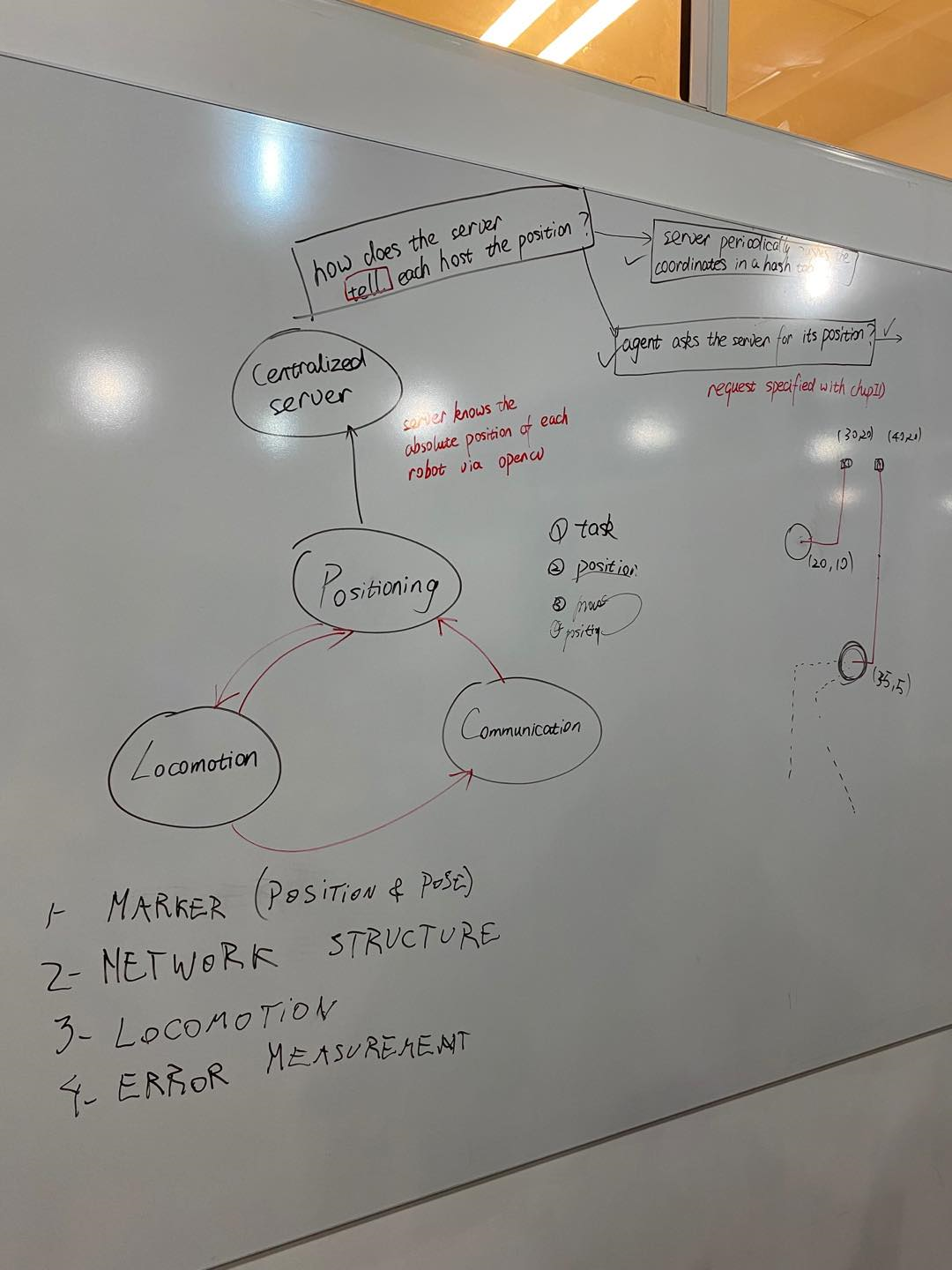
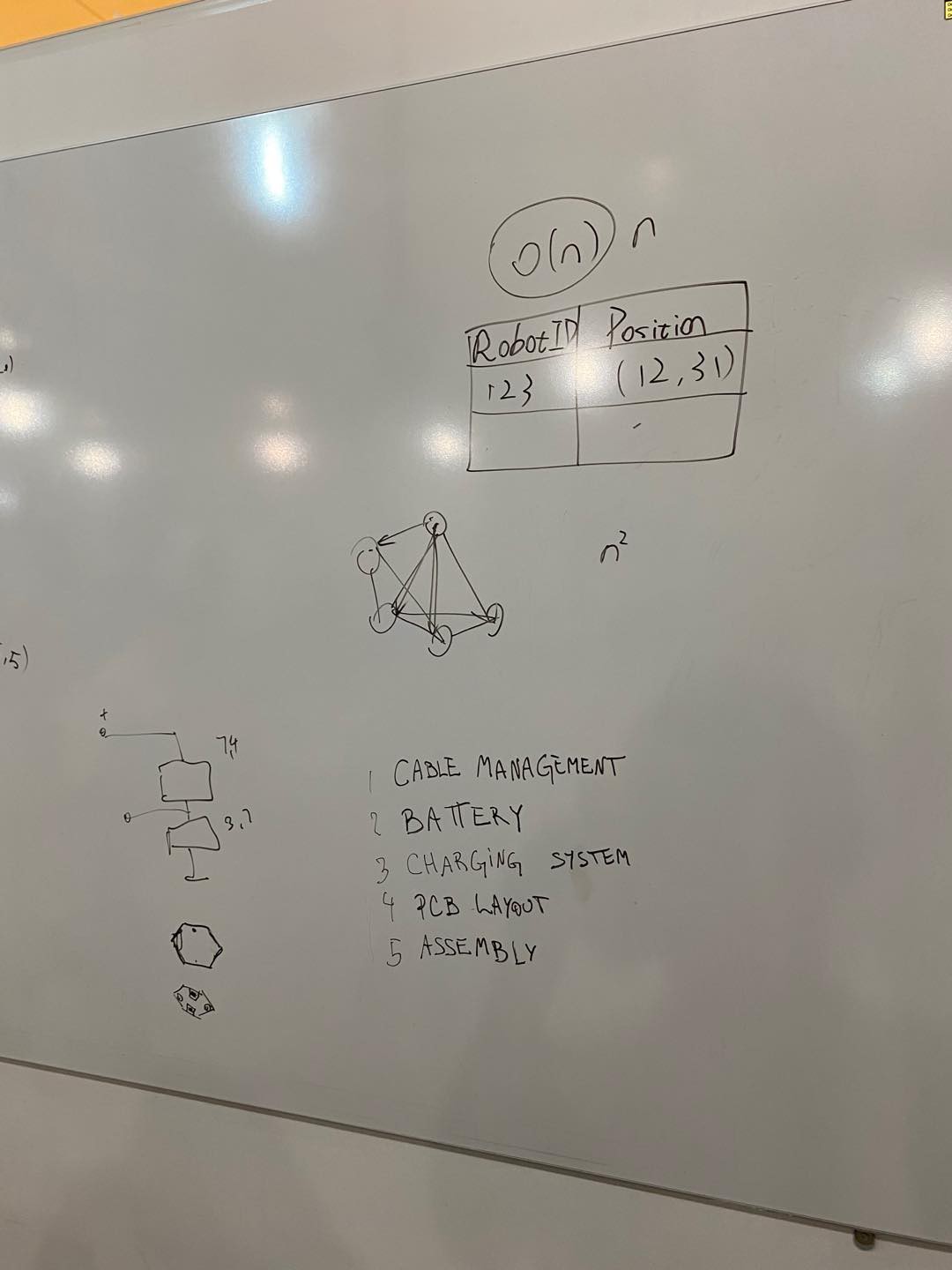


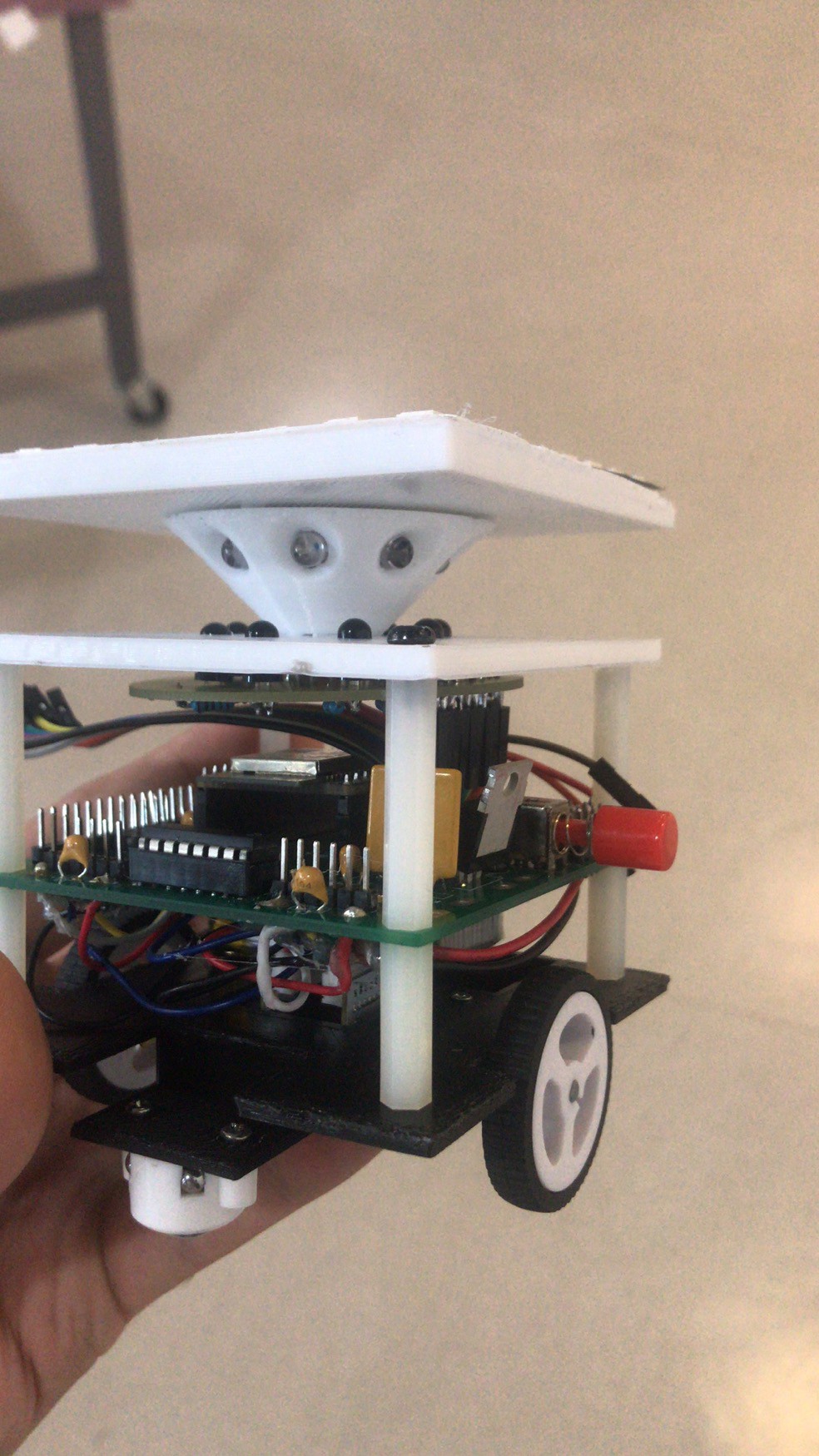
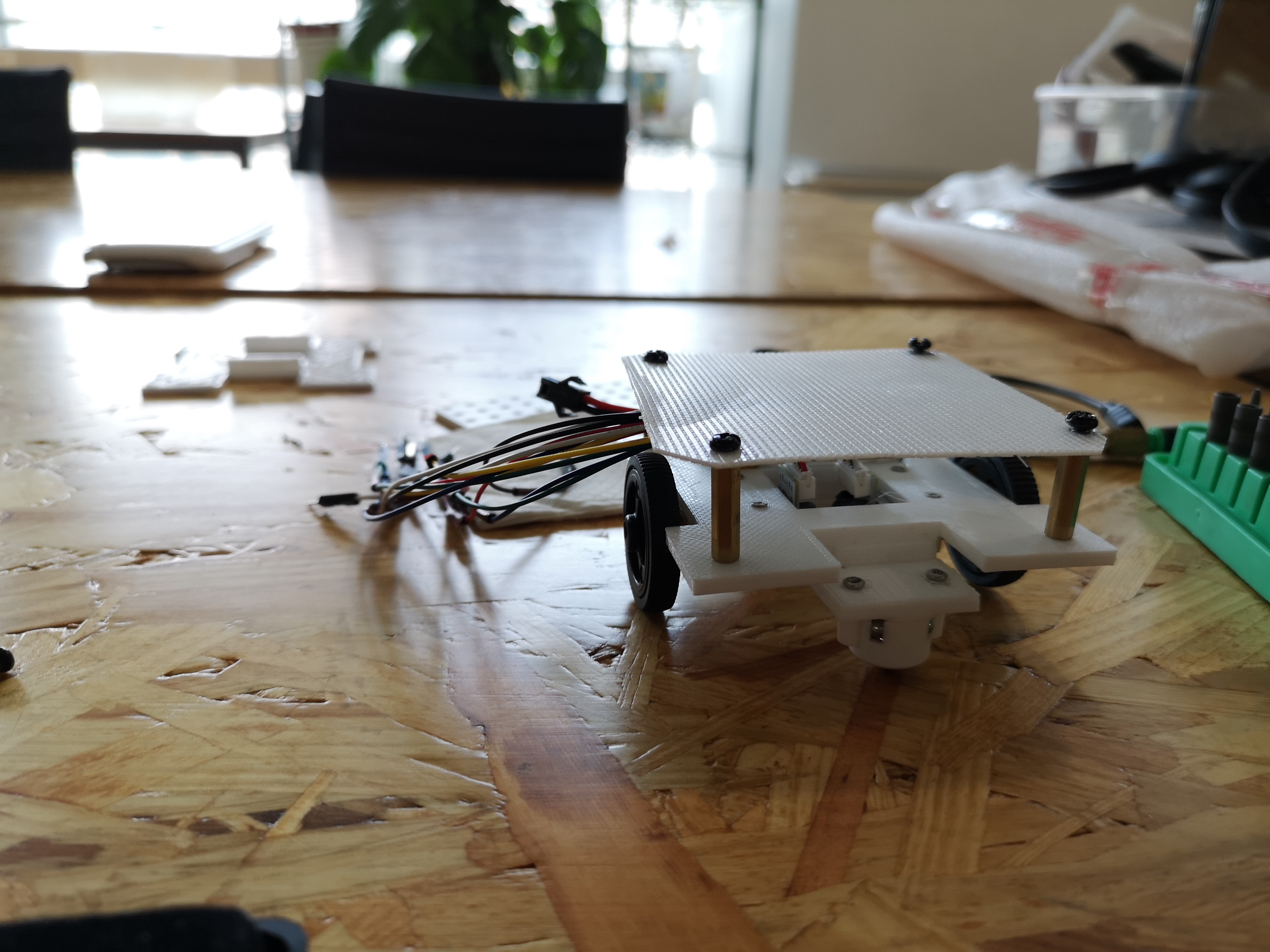
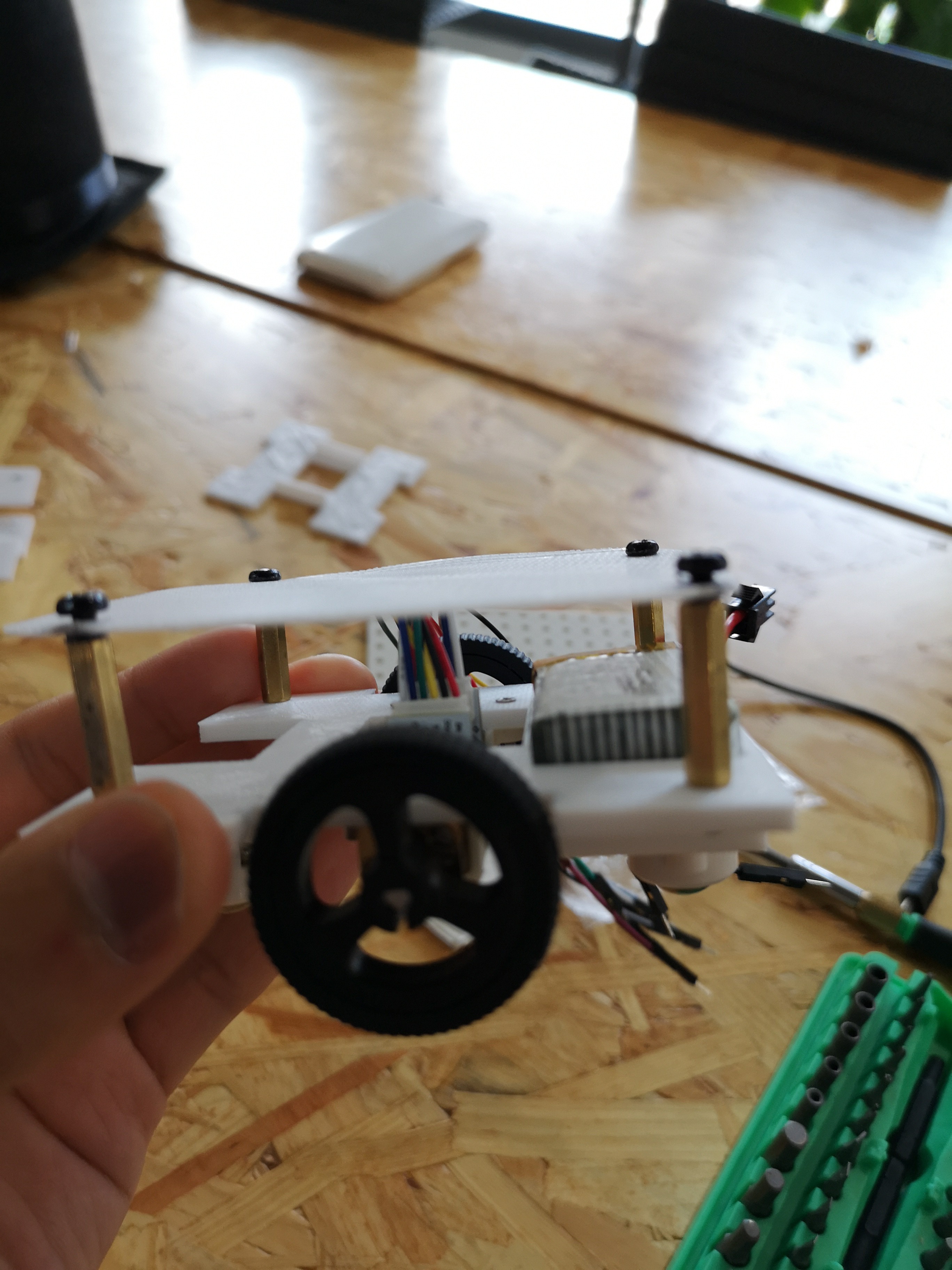
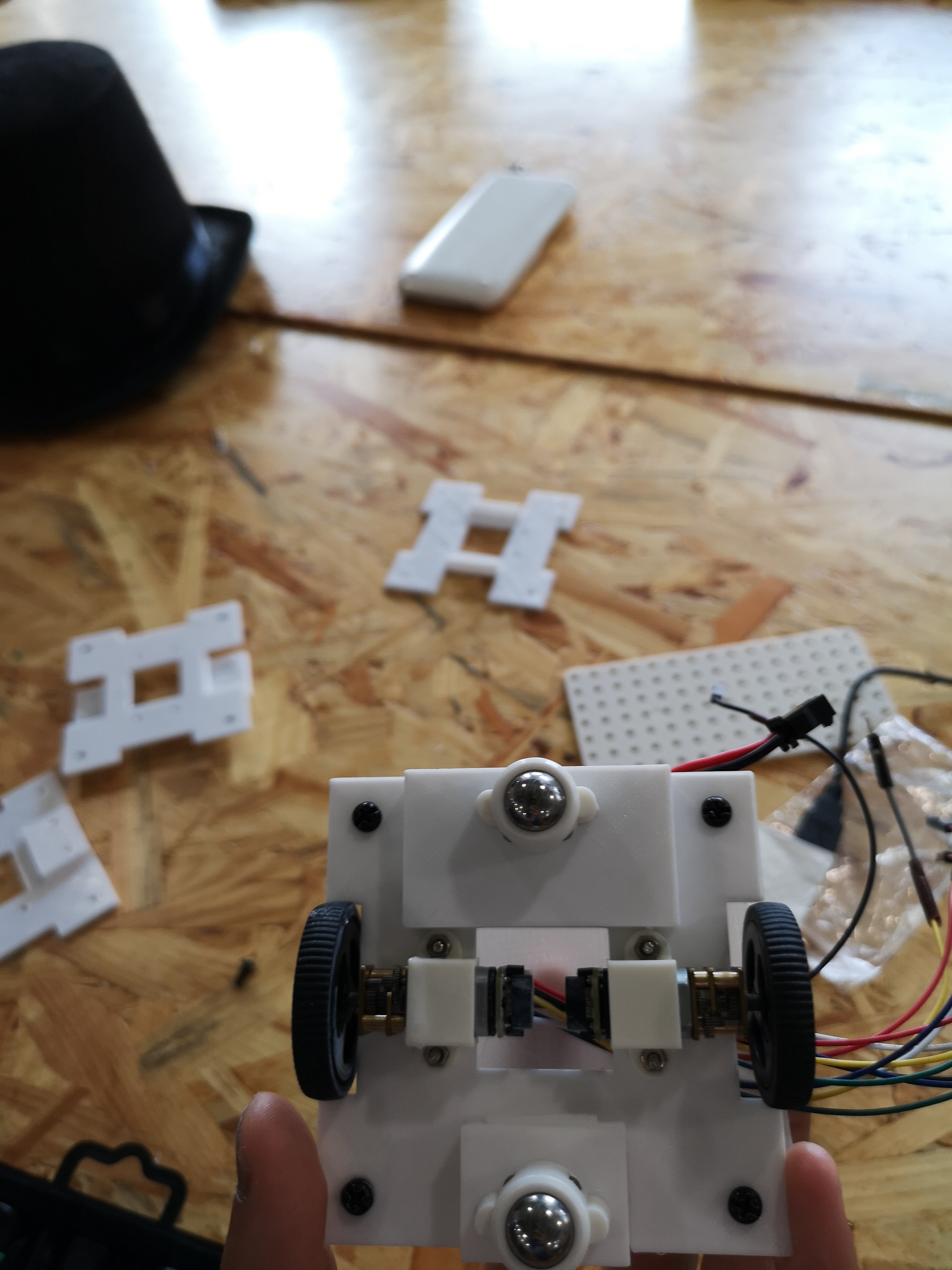
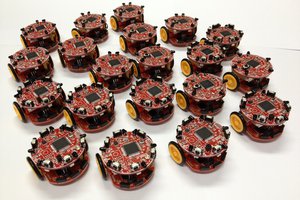
 When we were building the model, we took several things into consideration.
When we were building the model, we took several things into consideration.

 Keith Elliott
Keith Elliott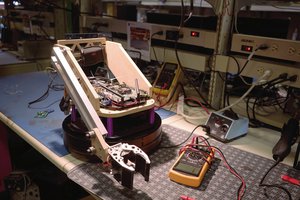
 Jack Qiao
Jack Qiao
 Joshua Elsdon
Joshua Elsdon
 Radu Motisan
Radu Motisan
I'm excited to see how this works out!!!