0%
0%
Fox.Build PNP
This is an attempt to bring pick and place capability to our makerspace based on the work done by Erich Styger
 shane.snipe
shane.snipeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
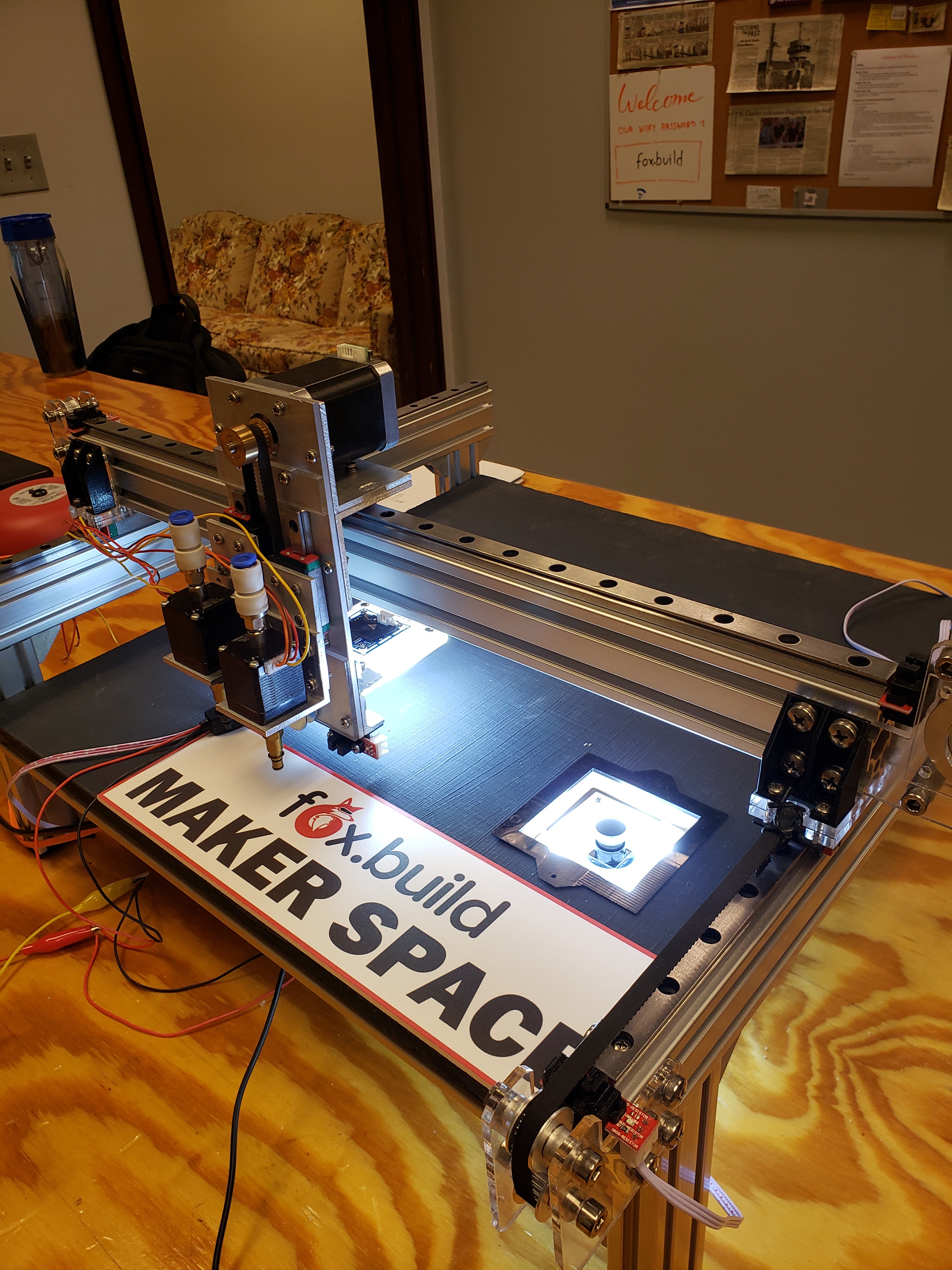
 The additions to the design that we incorporated were as follows:
The additions to the design that we incorporated were as follows:
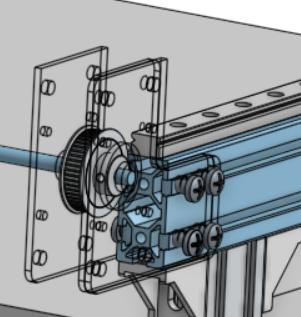

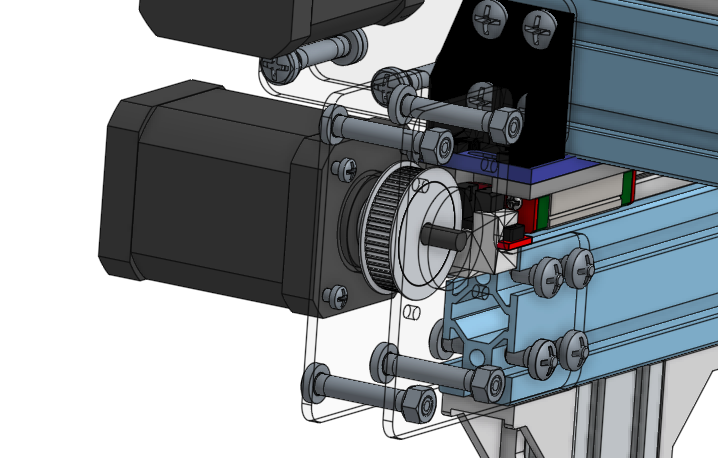 Here is how it looks with the shaft, the shaft coupler, the additional pulley and the brass shaft bushing.
Here is how it looks with the shaft, the shaft coupler, the additional pulley and the brass shaft bushing. 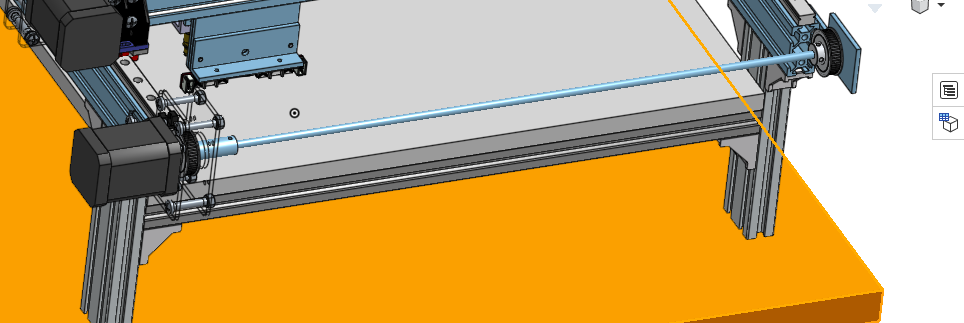
 To find his model search for
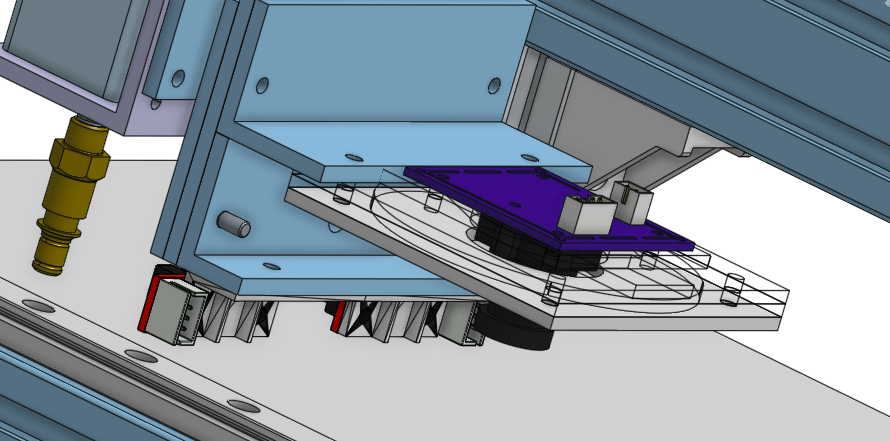
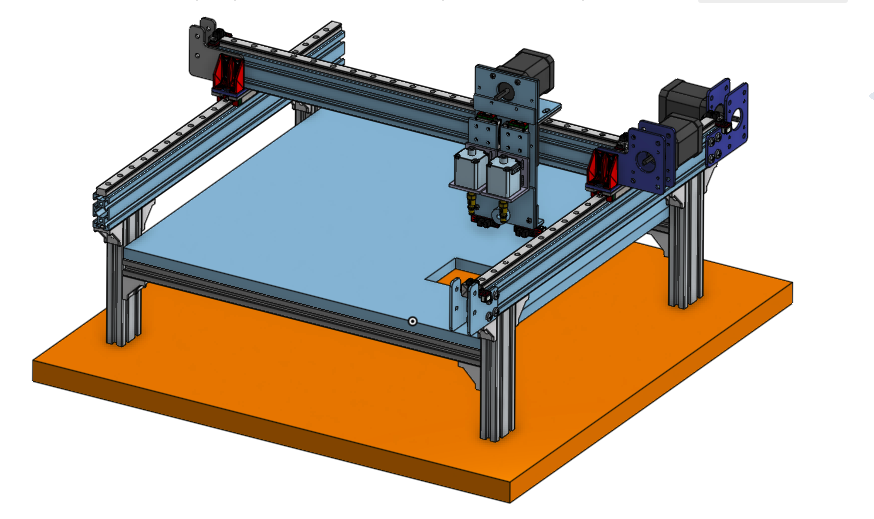
To find his model search for 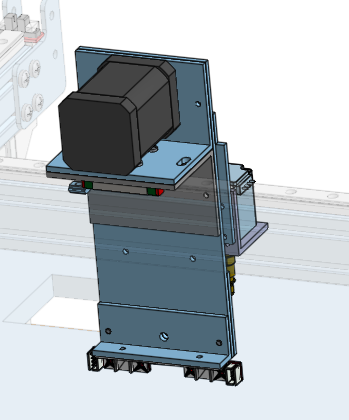 Two pcs of 2" aliminum angle are screwed to the slider. The upper one has a bolt pattern and cut out or the motor. Directly bolted to these 2 angles is the front plate. On the bottom is the bracket to mount end stop sensors for the pick and place head slides. There will be one more angle mounted on the back here to mount the camera assembly but we have not determined the height yet. Here is a picture from the front.
Two pcs of 2" aliminum angle are screwed to the slider. The upper one has a bolt pattern and cut out or the motor. Directly bolted to these 2 angles is the front plate. On the bottom is the bracket to mount end stop sensors for the pick and place head slides. There will be one more angle mounted on the back here to mount the camera assembly but we have not determined the height yet. Here is a picture from the front. 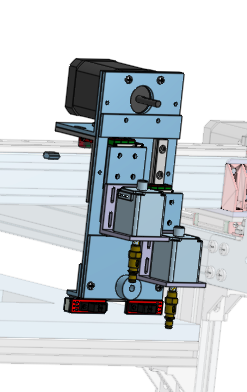
 charliex
charliex
 Bash Sarbora
Bash Sarbora
 Alastair Young
Alastair Young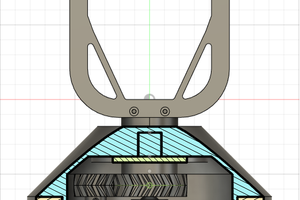
 caver.adam
caver.adam