0%
0%
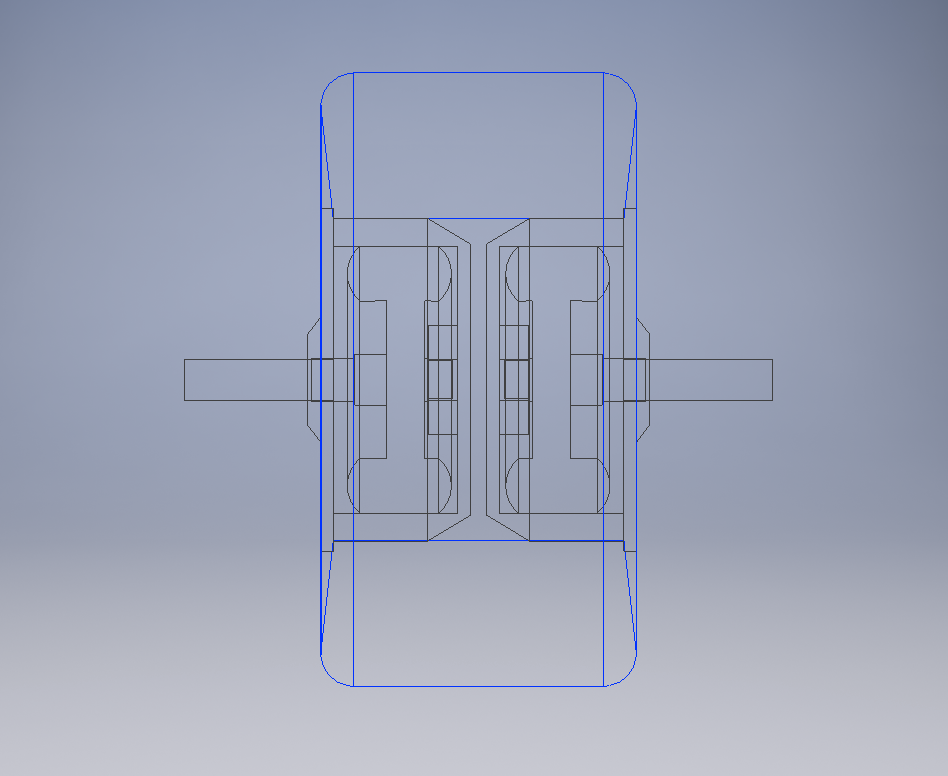
DIY Onewheel
Pint-sized DIY Onewheel based on Hoverboard electronics, heavily inspired by ZbLab's progress.
 Matt
MattBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Gertlex
Gertlex
 James Dietz
James Dietz
 Tobias
Tobias
 Nick Rehm
Nick Rehm
It is very lovely and informative article so thank you for sharing it. babyboy