 Dongil Choi
Dongil ChoiVESCular6 Firmware (GPL v3) : https://github.com/dongilc/bldc_5.02_openrobot_ver1
VESCular6 ROS Driver and Example (GPL v3) : https://github.com/dongilc/catkin_ws_openrobot
VESC-Tool download page (GPL v3) : https://vesc-project.com/vesc_tool
VESC firmware based Motor Controller, Small Circular Type
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
VESCular6 Firmware (GPL v3) : https://github.com/dongilc/bldc_5.02_openrobot_ver1
VESCular6 ROS Driver and Example (GPL v3) : https://github.com/dongilc/catkin_ws_openrobot
VESC-Tool download page (GPL v3) : https://vesc-project.com/vesc_tool
I would like to introduce the process of replacing the motor controller of the actuator of steadywin with VESCular6. The actuator that I have is an early model of Steadywin and was purchased from Aliexpress about two years ago. I was surprised by the quality of the product at the time of purchase, but I haven't used it for a while. I recently changed the motor controller to VESCular6, so I want to show you this process.
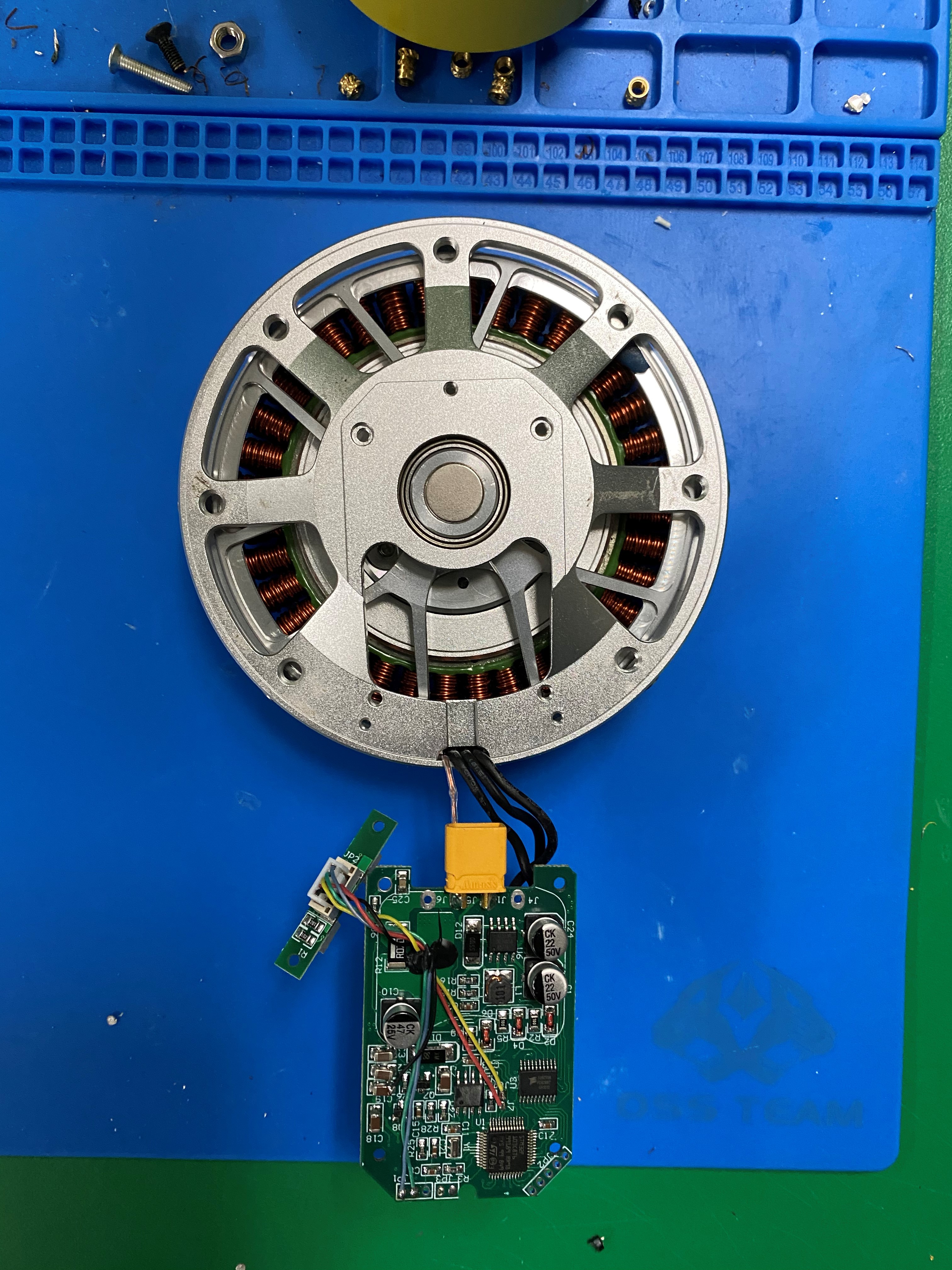
1. The interior of the steadywin motor is as follows.
2. Remove Existing Motor Controller
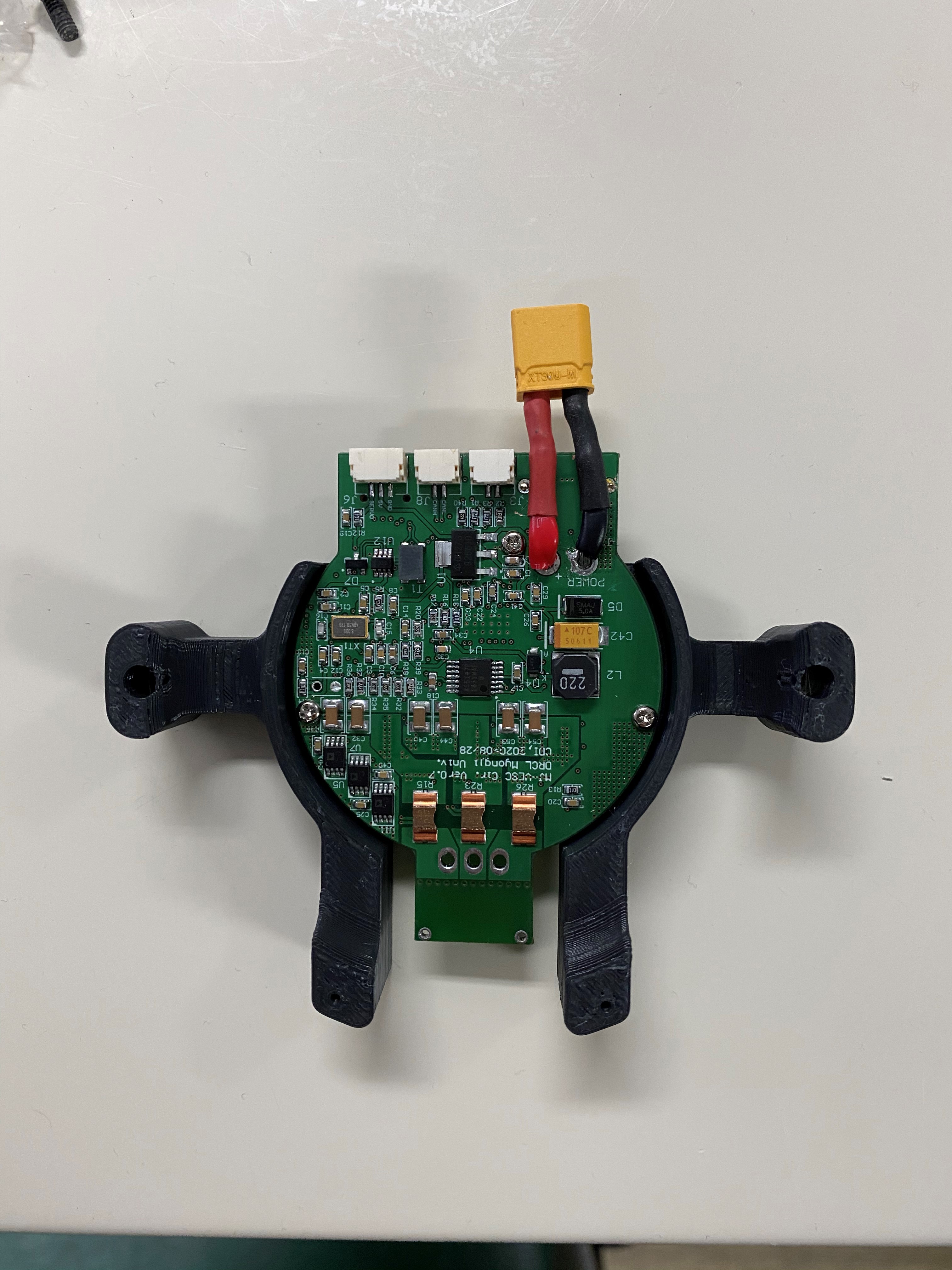
3. Fixing VESCular6 to a 3D printer-designed cover
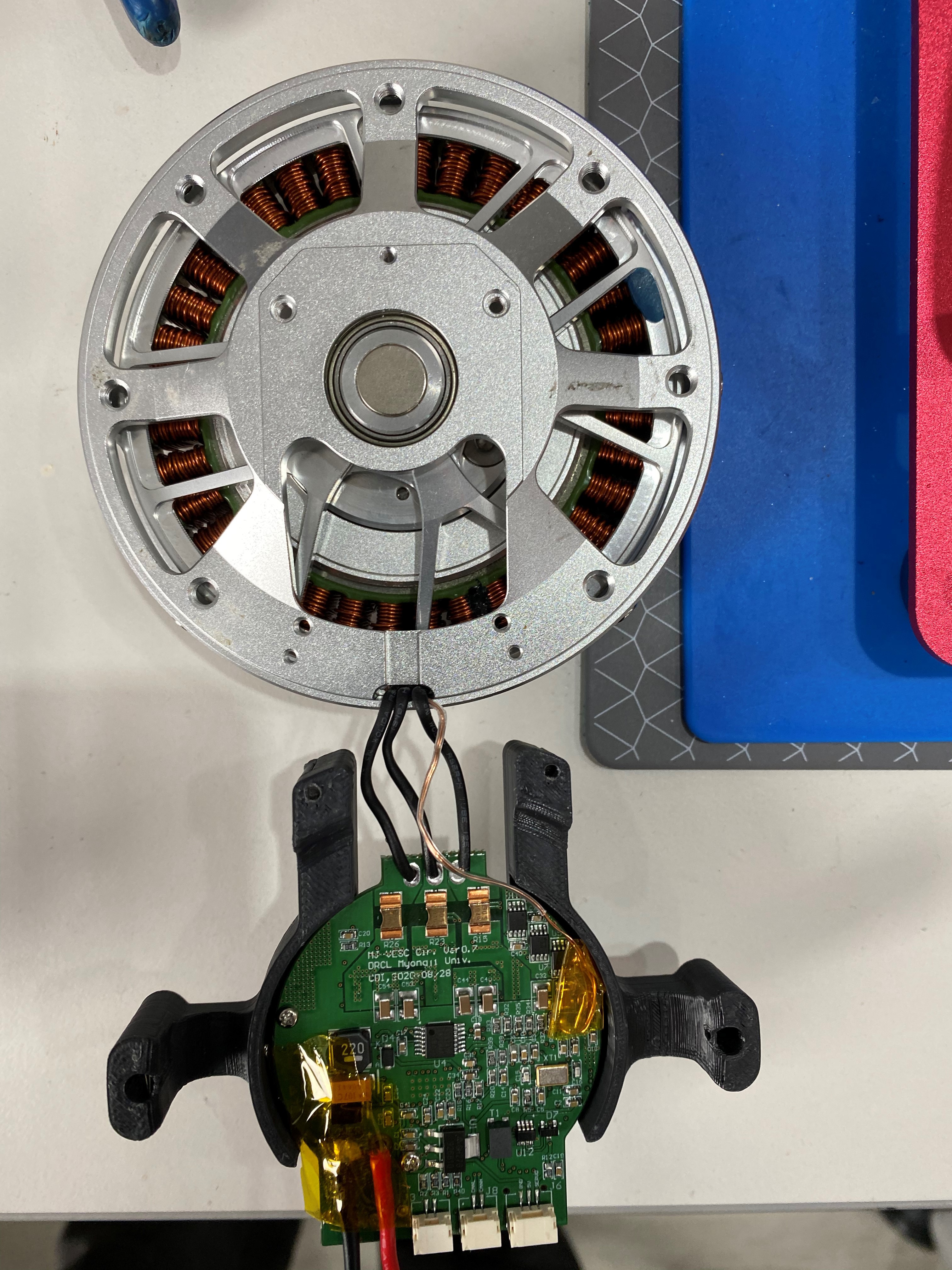
4. Connecting VESCular6. Remove the default NTC 10K temperature sensor on VESCular6, and connect the temperature sensor wire of the motor instead. (Polarity is irrelevant)
5. Assemble and complete
* The test video will be uploaded later.
We started selling VESCular6.
You can order from the website below.
https://openrobotinc.com/shop/p/vescular6
VESCular6 Firmware can be downloaded from the site below,
https://github.com/dongilc/bldc_5.02_openrobot_ver1
And, VESCular6 ROS Driver and examples can be downloaded from the site below.

We're almost ready for selling "VESCular6".
15 "VESCular6" have been completed in initial volume and will be officially sold.
If the initial supply is exhausted, you can purchase it in a pre-order manner.
For pre-ordering, we receive a certain amount of orders, produce and ship them at once, which may take about a month.
VESCular6 is a multi-functional motor controller that specializes in "Robot Position Control". Based on Benjamin Vedderb's VESC6 hardware, it provides complete compatibility and enables accurate position control through additional developed Custom App Software.
VESCular6 can be purchased from Site below.
190916 - PCB power on, firmware upload testing, usb connection test done.




 Anthrobotics
Anthrobotics
 Keith
Keith
 Jason
Jason
 Alan Kilian
Alan Kilian