0%
0%
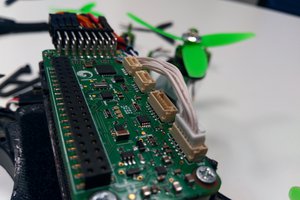
Inverted Mecanum Drives Robotic Table Soccer
Two threadless leadscrews with opposite "thread" directions. Brushless motor control of the drives. Linear and rotational magnetic encoders.
 Paul Gould
Paul GouldBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Víctor Mayoral Vilches
Víctor Mayoral Vilches
 Neil Draeger KC9MRW
Neil Draeger KC9MRW

This innovative design for controlling the player on the shaft in a robotic table soccer system is quite impressive. It addresses the challenge of achieving both linear and rotational movement efficiently. The use of custom components like the PSOC4 brushless controller, magnetic rotation absolute encoder, and multi-pole magnetic linear encoder demonstrates a high level of engineering sophistication.
What's particularly interesting is how the drives are incorporated into the sides of the table, leaving the shaft's ends free. This approach not only saves space but also allows for a more seamless and immersive gameplay experience.
you can also see my work for soccer https://socceriate.com/soccer-players-with-number-11/