Our design goals:
We designed SCARA robot with an intention of creating a fully functional mechanism, that is capable of functioning in all dimensions. We wanted to keep the design simple so that our end product wouldn't be unnecessarily complecated, what would hinder its functionality.
Implementation
We settled on a modular approach, dividing the entire device into multiple parts each with a single functionality to fulfill. We decided to settle on the following components:
- Base - Split into two parts, holds the power supply and a motor that allows the arm to rotate in horizontal axis.
- Arm - Built using two links, again, each as a separate part.
- First link - Connects the arm to the base and holds a motor that allows the arm to extend.
- Second link - Connected to the first link holds a motor that handles vertical movement of the pen.
Each part was designed to be simple, but also stable enough to serve its purpose without any difficulties. This publication contains files for all the components and their assembly below. Technical drawings, containing details and lists of LEGO parts necessary to assemble the robot can also be found below.
Parts
To create this project we used LEGO Mindstorms and Lego Technic parts, detailed list of all parts used can be found below.
FEM Analysis
Current results of both FEM and kinetic analyses can be found in the attached directory or under the following link.
Animation
Operation of our robot is displayed in the following video:
Documentation
The documentation of our entire project can be found among attached files.

 Pavel Surynek
Pavel Surynek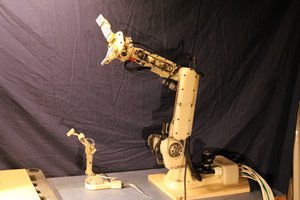
 Michael Laffin
Michael Laffin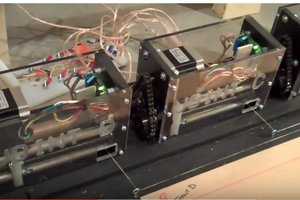
 Tom
Tom
 Joseph Lavoie
Joseph Lavoie